Электронные карты
Геодезическая основа отсчета координат ЭК
Разграфка электронных карт
Формат для обмена картографической информацией
Корректура электронных карт
Основные принципы построения АКС
Обеспечение АКС
Информационно-программное обеспечение НИКС
Другие базы данных
Справочная система НИКС
О НИКС как о центре судовой информационной сети
Планирование пути
Контроль прохождения маршрута
Регистрация информации
Управление движением судна
Анализ информации основных внешних навигационных датчиков НИКС
Анализ информации СНС
Краткая характеристика системы «ГЛОНАСС»
Автоматические идентификационно-информационные системы
Функции АИС, предоставляемые сведения, частота обновления данных
Ограничения АИС
Погрешности, обусловленные ошибками датчиков информации
Данные ЭК и их структура
Предварительная прокладка
IEC Protocol 61162-1 "Digital Interfaces - .Navigation and Radiocommunication Equipment On Board Ship"
Навигация
Контроль прохождения маршрута
Электронные системы отображения навигационных карт
223834
знака
6
таблиц
7
изображений
3.1.4 Контроль прохождения маршрута
ECDIS ведет непрерывный контроль проводки судна по маршруту. Она представляет судоводителю наименование маршрута и данные, характеризующие его прохождение: маршрутные координаты: расстояние (DTG), пеленг и расчетное время (TTG) движения до ближайшей путевой точки; ожидаемое время прибытия в эту точку (ЕТА), направление на эту точку (WTG), и поправку к текущему курсу для выхода в эту точку (разница между HOG и WTG). Индицируются также текущее направление линии запланированного пути (CUR) и следующее за ним направление (NXT), а также боковое смещение от линии пути (ХТЕ).
Для визуального контроля движения судна по намеченному пути ECDIS позволяет показать на карте допустимые границы маршрута (Clearing lines). ECDIS предупреждает об отклонениях от маршрута, выходящих за заданный предел, а также о подходе к точке поворота, чтобы судоводитель мог заблаговременно подготовиться к маневрированию.
Предусмотрена функция для оперативного изменения маршрута без выхода в раздел «предварительная прокладка».
3.1.5 Контроль навигационной безопасности
ECDIS осуществляет контроль безопасности плавания. В некоторых ECDIS программой формируется "Фигура безопасности" (Safety online), которая может быть выведена на индикацию или нет. Реализована функция автоматической подачи сигнала предупреждения при попадании опасного объекта в пределы фигуры безопасности, независимо от того, показывается она на экране или нет. Вырабатывается несколько типов предупреждений. Каждый тип имеет свое поле на панели индикации и сопровождается специальным звуковым сигналом или голосом.
Имеется в ECDIS функция установки ширины полосы движения при плавании по заданному маршруту. В процессе перехода при выходе судна за пределы этой полосы срабатывает сигнализация.
Возможно в ECDIS выделение безопасной глубины и изобаты. Судоводитель может воспользоваться этой функцией для определения на карте областей опасных глубин (т.е. областей с глубиной меньшей или равной глубине безопасности судна). При входе согласно карте судна в область опасных глубин, ECDIS выдаст звуковое предупреждение, сопровождаемое визуальной индикацией. Для предупреждения судоводителя об опасных глубинах к ECDIS также подключается эхолот. Взаимодействие ECDIS с эхолотом осуществляется на основе протокола ГЕС 61162-1. Информация эхолота сохраняется системой и может быть выведена на экран в виде кривой рельефа дна.
Для обращения внимания судоводителя и возможности принятия им своевременных мер предосторожности в ECDIS предусмотрены автоматические предупреждения о вхождении судна в районы с особыми условиями плавания.
Для контроля процесса движения судна по моментам достижения им определенного положения относительно той или иной характерной точки на местности (ориентира, опасности, элемента побережья и др.) возможна постановка маркеров событий. Выбранная на карте точка обозначается специальной отметкой (маркером). Судоводитель может выбрать следующие условия взаимного расположения судна и маркера: достижение заданного пеленга, сближение на заданную дистанцию, удаление на определенное расстояние, достижение судном траверза. После того, как произошло описанное событие, ECDIS подаст звуковое и визуальное предупреждение.
Предусматривается контроль точности навигации. Возможно предвычисление погрешности обсерваций по различным позиционным системам (ЕРЕ - expected position error) с показом на экране ее границ, сравнение данных нескольких позиционных средств, выявление грубых определений на основе сравнения обсервации с предвычисленным по счислению местом и с обсервациями по другой независимой позиционной системе. Выполняется контроль качества информации поступающей от различных датчиков.
Функции работы с пользовательскими слоями информации позволяют судоводителю нанести поверх любой карты дополнительные линии, символы, сектора, текст с целью подъема карты, что способствует повышению безопасности прохождения сложных участков пути.
В ECDIS обеспечивается прием и отображение на экране поступающих от NAVTEX-приемника сообщений (навигационных, метеорологических и ледовых предупреждений, информации об операциях поиска и спасания, метеорологических прогнозов и т.д.).
ECDIS контролирует работу подключенных к ней навигационных устройств и сообщает о неисправности любого из них судоводителю.
3.1.6 Функции для использования радиолокационной информации
ECDIS может работать с РЛС, обеспечивая отображение на ЭК первичной радиолокационной (РЛ) информации, которая может быть выведена поверх ЭК. Это облегчает сравнение РЛ-изображения с картой, позволяет установить неточность положения судна, а также обнаружить цели, о которых не было сигнализации при пересечении ими охранной дистанции.
При подключении САРП к ECDIS на ЭК представляются все взятые на сопровождение РЛ-цели как символы с идентификаторами и векторами истинной скорости. Имеются операции для изменения длины векторов экстраполированного перемещения целей, и обеспечивается выбор для отображения векторов истинного или относительного движения.
У отметок целей на ЭК могут выводиться следы их прошлого движения.
Для получения числовых данных движения целей имеется функция "Просмотр формуляров целей", при использовании которой отображаются пеленг, дистанция цели, ее курс и скорость, расстояние и время кратчайшего сближения. Опасные цели выделяются цветом.
В некоторых картографических системах (например NAVI-SAILOR 2400 ECDIS, разработанной фирмой ТРАНЗАС МАРИН) предусмотрен встроенный радар-интегратор с возможностями документировать и накладывать на электронную карту "сырое" РЛ-изображение, выделять, сопровождать и документировать большое количество целей.
В ECDIS реализуются функции для работы с АИС-траиспондером. Эта идентификационная система предназначена для обеспечения судоводителей максимально точной и подробной информацией об обнаруженных целях, имеющих AIS-транспондеры. Помимо сведений о курсе и скорости судна-цели (передаваемых им самим и поэтому точных), система АИС позволяет получить информацию о названии судна, его владельце, тоннаже и размерах, маршруте и типе перевозимого груза. Подобная информация может быть полезна, например, при планировании маневрирования и в ряде других случаев.
Для определения положения и элементов движения собственного судна и контроля безопасности его движения ECDIS предоставляет функции навигационного использования радиолокационной информации. Кинематические параметры собственного судна могут определяться при сопровождении неподвижных точечных объектов и характерных элементов протяженных РЛ-объектов.
Для возможности решения на основе РЛ-информации широкого спектра навигационных задач к ECDIS может подключаться специальный радиолокационно-навигационный модуль (РНМ). РНМ совместно с ECDIS предоставляют средства для отображения полного РЛ-образа акватории поверх электронной карты. Возможность синхронизации обоих изображений в реальном времени и наблюдения РЛ-образа, как совместно с картографическими данными, так и независимо, позволяет судоводителю легко ориентироваться в узкостях и незнакомых районах плавания. Одним из существенных преимуществ совместного использования РИМ и ECDIS является возможность взаимного контроля навигационных и радиолокационных средств в наглядной форме, что качественно повышает степень надежности всегокомплекса.
С помощью РНМ решаются следующие задачи:
обеспечение полной совместимости ECDIS с различными типами приемо-передатчиков радаров ведущих фирм производителей;
формирование цифрового РЛ-образа всей акватории и передача его в ECDIS;
уменьшение влияния на цифровой РЛ-образ помех естественного и искусственного происхождения (от морского волнения, дождя, тумана, низких облаков, снеговых зарядов, соседних РЛС). Для этой цели применяются алгоритмы "scan-to-scan" и "sweep-to-sweep" корреляции. Первый вид корреляции характеризует стохастическую зависимость РЛ-данных, соответствующих последовательным посылкам зондирующих импульсов. "Sweep-to-sweep" корреляцией оценивается зависимость цифровых РЛ-образов, последовательно получаемых при разных оборотах антенны;
оптимальное выделение малоразмерных морских целей на фоне мешающих отражений от береговой черты и портовых сооружений;
селекция РЛ-целей, измерение их координат и определение кинематических параметров;
реализация устойчивого к помехам алгоритма обработки видеосигналов целей.
Похожие работы
... электронных карт осуществляет IHO во взаимодействии с IMO . Электронная карта охватывает как термин три понятия : описание данных ; программное обеспечение для их обработки ; электронную систему отображения данных . Электронные карты могут быть , а могут и не быть эквивалентными бумажным картам , требуемым конвенцией СОЛАС-74 . Понятия хранения / передачи и отображения данных электронной ...
... времени могут быть также переданы в программные пакеты которым необходима информация для всевозможного моделирования, например создания цифровых моделей местности (ЦММ). Выводы: 1) Система глобального позиционирования являет собой инструмент с огромным потенциалом и широчайшим кругом использования. 2) Навигационные возможности систем могут оказать неоценимую помощь в поиске и спасении людей, в ...



... , что считается другими государствами её главным недостатком. Более известна под названием GPS. Единственная полностью работающая спутниковая навигационная система. · ГЛОНАСС Глобальная навигационная спутниковая система (ГЛОНАСС) – советская и российская спутниковая система навигации, разработанная по заказу Министерства обороны СССР. Принадлежит министерству обороны России. Является попыткой ...
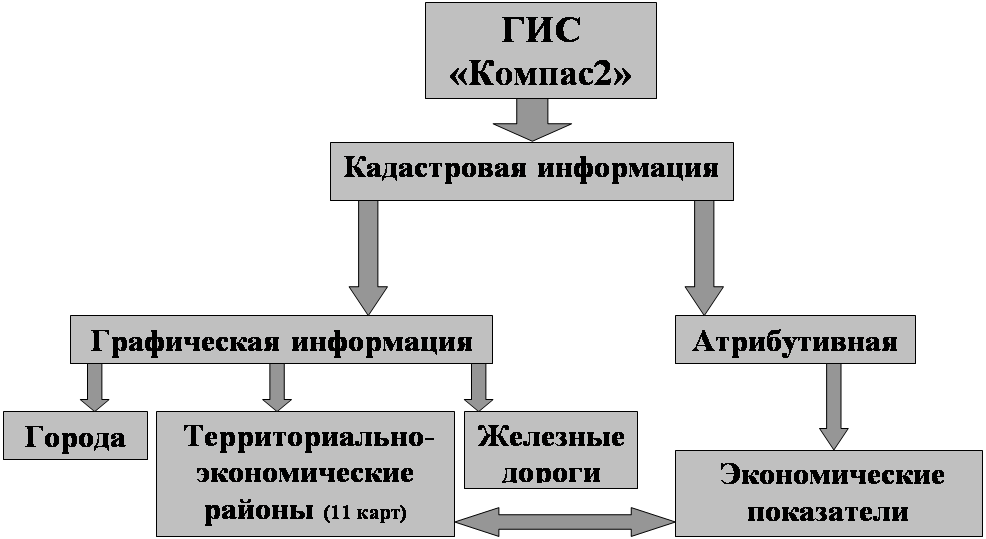
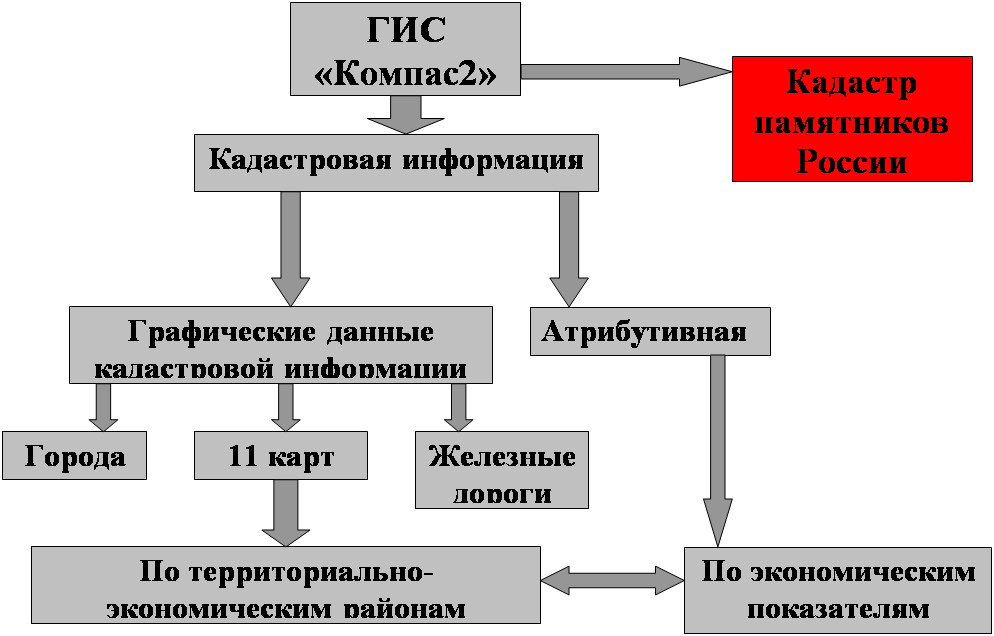
... кадастра памятников России и привязки его к ГИС «Компас-2», я изучил возможности, функции ГИС «Компас-2», а также возможность использования его для создания различных видов природных кадастров. Компас-2 – это сетевая система для представления, моделирования и анализа географической информации Функциональные возможности системы КОМПАС 2: публикация географической информации (ГИ) в сетях ...
0 комментариев