Электронные карты
Геодезическая основа отсчета координат ЭК
Разграфка электронных карт
Формат для обмена картографической информацией
Корректура электронных карт
Основные принципы построения АКС
Обеспечение АКС
Информационно-программное обеспечение НИКС
Другие базы данных
Справочная система НИКС
О НИКС как о центре судовой информационной сети
Планирование пути
Контроль прохождения маршрута
Регистрация информации
Управление движением судна
Анализ информации основных внешних навигационных датчиков НИКС
Анализ информации СНС
Краткая характеристика системы «ГЛОНАСС»
Автоматические идентификационно-информационные системы
Функции АИС, предоставляемые сведения, частота обновления данных
Ограничения АИС
Погрешности, обусловленные ошибками датчиков информации
Данные ЭК и их структура
Предварительная прокладка
IEC Protocol 61162-1 "Digital Interfaces - .Navigation and Radiocommunication Equipment On Board Ship"
Навигация
Краткая характеристика системы «ГЛОНАСС»
Электронные системы отображения навигационных карт
223834
знака
6
таблиц
7
изображений
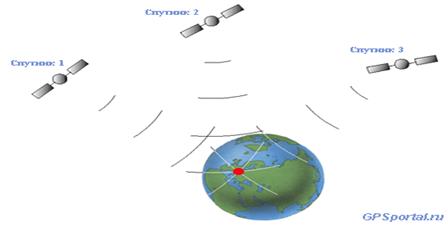
4.3.3 Краткая характеристика системы «ГЛОНАСС»
Советская глобальная спутниковая навигационная система (ГЛОНАСС) состоит из 24 НИСЗ, наземного командно-измерительного комплекса и аппаратуры потребителей. Она является глобальной, всепогодной, навигационной системой, обеспечивающей определение координат объектов с высокой точностью в трехмерном околоземном пространстве. В полном объеме функционирование ГЛОНАСС началось с января 1996 г.
Спутники ГЛОНАСС расположены на трех средневысоких орбитах (высота 19100 км) и имеют период обращения 11 часов 15 минут. Плоскости орбит расположены через 120° и наклонены к экватору под углом 64.8°. На каждой орбите располагается 8 спутников.
Каждый спутник излучает информацию о своей точной позиции и информацию о позициях других спутников. Излучение навигационных сигналов спутниками ГЛОНАСС производится на двух несущих частотах: F1 и F2. Режим излучения - непрерывный с псевдошумовой модуляцией. В отличие от GPS, каждый спутник ГЛОНАСС имеет свои значения F1 и F2. Значения частот F1 всех спутников ГЛОНАСС лежат в диапазоне 1602.6-1615.5 МГц и отличаются для разных спутников на величину, кратную 0.5625 МГц. Соответственно значения частот F2 находятся в диапазоне 1246.4-1256.5 МГц и отличаются для разных спутников на величину, кратную 0.4375 МГц.
Навигационные сигналы представляют собой Р-код , излучаемый на часотах F1, F2, и С/А-код, излучаемый только на частоте F1. В отличие от GPS, где коды Р и С/А для разных спутников разные, в ГЛОНАСС они одинаковы для всех спутников. Таким образом, в отличие от применяемого в GPS кодового метода в ГЛОНАСС реализован частотный метод различения навигационных сигналов спутников.
Аппаратура пользователей включает оборудование, необходимое для сопровождения спутников, определения позиции, скорости и времени по данным орбит спутников и измерениям навигационных параметров. Для приема навигационных сигналов имеется 24 частотных канала. В среднем точность определения положения с помощью специальной бортовой аппаратуры ГЛОНАСС составляет 8 метров. Если GPS имеет наилучшую точность в средних широтах, то ГЛОНАСС - в высоких.
ГЛОНАСС дает место в геодезической системе П390. Разность между положением объекта в П390 и WGS84 не превышает 15 м, в среднем она составляет 5 м. В настоящее время уточняются для разных районов Земли точные значения поправок для перехода от системы П390 к WGS84.
Система ГЛОНАСС может использоваться совместно с GPS (GPS and GLONASS Global Navigation Satellite System - GNSS). Это позволяет по сравнению с GPS повысить точность и надежность определений за счет увеличения числа наблюдаемых спутников. улучшения геометрии их расположения в высоких широтах, использования обоих кодов ГЛОНАСС в аппаратуре для массового потребителя, что дает возможность более точно учесть в GPS ионосферную погрешность.
4.4 Информация радиолокатора и САРП
Радиолокатор является для НИКС одним из основных датчиков информации для определений положения и параметров движения судна в стесненных водах. Радиолокационные определения места производятся путем привязки к элементам береговой черты. Кроме этого, информация РЛС и САРП играет основную роль при решении задач предупреждения столкновений судов. Характеризуя информацию РЛС и САРП, необходимо отметить следующее.
Дальность обнаружения объектов в РЛ-системе зависит от нескольких фаеторов, размеров и отражающей способности самих объектов, характеристик РЛС, высоты антенны, наличия помех.
При нормальных условиях распространения радиоволн, когда высота антенны над уровнем моря равна 15 м и нет помех, РЛС должна давать четкое изображение:
• Берега - на расстоянии 20 NM, когда он возвышается над уровнем моря до 60 м; и на расстоянии 7 NM, когда он поднимается до 6 м;
• Надводных объектов: судов вместимостью 5000 брт независимо от ракурса - на расстоянии не менее 7 NM; малых судов длиной порядка 10 м - на расстоянии не менее 3 NM; объектов, таких как навигационные буи, имеющих эффективную отражающую поверхность порядка 10 кв.м. - на расстоянии не менее 2 NM. Когда антенна расположена на высоте 15 м над уровнем моря, то даже в условиях помех от моря РЛ-система должна давать четкую отметку стандартного радиолокационного отражателя на расстоянии до 3.5NM.
Говоря о минимальной дистанции РЛС, следует отметить, что надводные объекты должны быть четко отображены на экране РЛС, начиная с минимальной горизонтальной дистанции 50 м от позиции антенны.
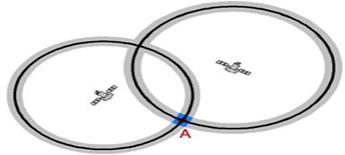
Определение места судна с помощью РЛС производится по измерениям пеленгов и расстояний береговых объектов либо обзорньм методом (совмещением радиолокационного изображения с изображением береговой черты на ЭК).
Погрешность измерений дистанций с помощью РЛС не должна превышать 1% от значения шкалы дальности. Основными Компонентами погрешности РЛ-измерения дистанции до точечного объекта в автоматическом режиме слежения за ним являются: погрешность от нестабильности задержки излучения зондирующего импульса передатчика относительно импульса синхронизации РЛС, погрешность от квантования по времени РЛ-сигнала и нестабильность генератора квантов дальности, отклонение центра отметки объекта от его реального положения.
Погрешность измерения пеленга складывается из погрешности курсоуказания и погрешности измерения курсового угла. В автоматическом режиме слежения за точечным объектом погрешность измерения курсового угла включает в себя: погрешность от квантования угла поворота антенны, люфт антенны, погрешность из-за несиметричности и ширины диаграммы направленности антенны, погрешность от качки судна, погрешность от флуктуации по пеленгу центра РЛ-отметки объекта. Суммарная погрешность измерения курсового угла обычно не превышает 0.4°.
Разрешающая способность по дистанции РЛ-системы на шкале 1.5 NM должна быть не более 40 метров в ситуации, когда две точечные цели расположены на одном пеленге в пределах пространства 50-100% от значения шкалы. Соответственно разрешение по пеленгу на этой шкале для двух точечных целей, расположенных на одном расстоянии от центра в пределах 50-100% значения шкалы должно быть не более 2.5° .
На качество радиолокационной информации влияют состояние атмосферы, ветер, дождь, град, снег, туман и смог, облака, песчаные бури, теневые сектора, работа радаров других судов и др. факторы. Эти обстоятельства могут стать причиной радиолокационной "невидимости" объектов, срывов автосопровождения целей, увеличения погрешностей измерений и погрешностей элементов движения целей, вычисляемых на основе измерений.
Точность результатов вычислений в САРП кинематических параметров целей зависит от точности измеряемых пеленгов и дистанций, погрешностей параметров, характеризующих движение своего судна, геометрии сближения, стадии автосопровождения (захват траектории или устойчивое сопровождение). Следует отметить, что маневр судна обычно выявляется САРП с запозданием порядка 1 мин. Сразу после маневра представляемые САРП значения кинематических параметров целей содержат значительные погрешности и требуется порядка 3 мин, чтобы точность вычисляемых параметров снова стала удовлетворительной.
При использовании САРП для определения кинематических параметров собственного судна на сопровождение берутся неподвижные навигационные ориентиры. Эффективность решения этой навигационной задачи зависит от ряда факторов. Максимальная и минимальная дальность надежного для сопровождения ориентира зависит от характеристик РЛ-системы, геометрических размеров и отражающей способности самого ориентира, наличия теневых секторов РЛС, ее мертвой зоны, состояния моря. Устойчиво САРП сопровождает только точечные ориентиры. Предсказать стабильность автосопровождения протяженного ориентира очень сложно. При сопровождении точечных ориентиров могут наблюдаться срывы, а порой невозможность захвата, если точечный объект расположен близко к берегу, или входит в группу близко расположенных друг к другу точечных объектов.
Похожие работы
... электронных карт осуществляет IHO во взаимодействии с IMO . Электронная карта охватывает как термин три понятия : описание данных ; программное обеспечение для их обработки ; электронную систему отображения данных . Электронные карты могут быть , а могут и не быть эквивалентными бумажным картам , требуемым конвенцией СОЛАС-74 . Понятия хранения / передачи и отображения данных электронной ...
... времени могут быть также переданы в программные пакеты которым необходима информация для всевозможного моделирования, например создания цифровых моделей местности (ЦММ). Выводы: 1) Система глобального позиционирования являет собой инструмент с огромным потенциалом и широчайшим кругом использования. 2) Навигационные возможности систем могут оказать неоценимую помощь в поиске и спасении людей, в ...



... , что считается другими государствами её главным недостатком. Более известна под названием GPS. Единственная полностью работающая спутниковая навигационная система. · ГЛОНАСС Глобальная навигационная спутниковая система (ГЛОНАСС) – советская и российская спутниковая система навигации, разработанная по заказу Министерства обороны СССР. Принадлежит министерству обороны России. Является попыткой ...
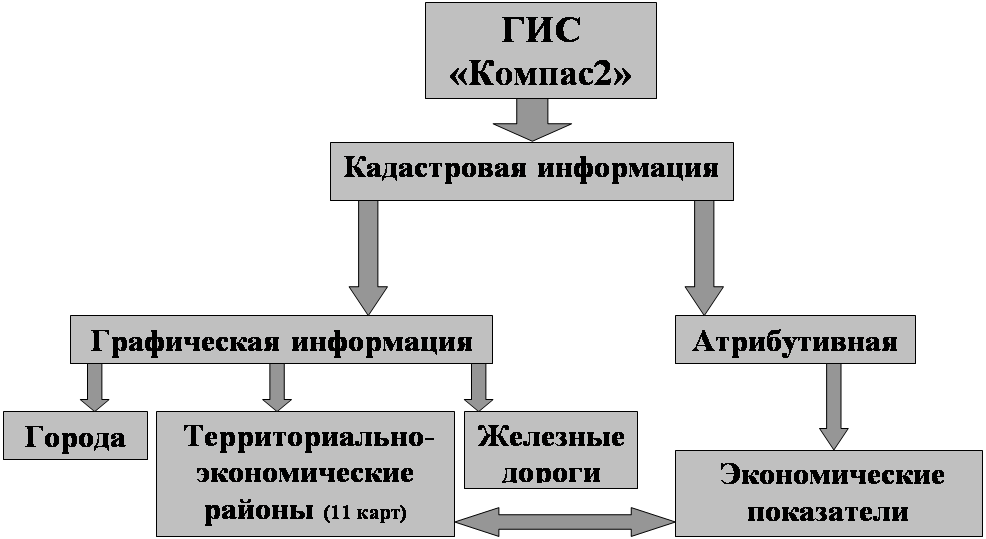
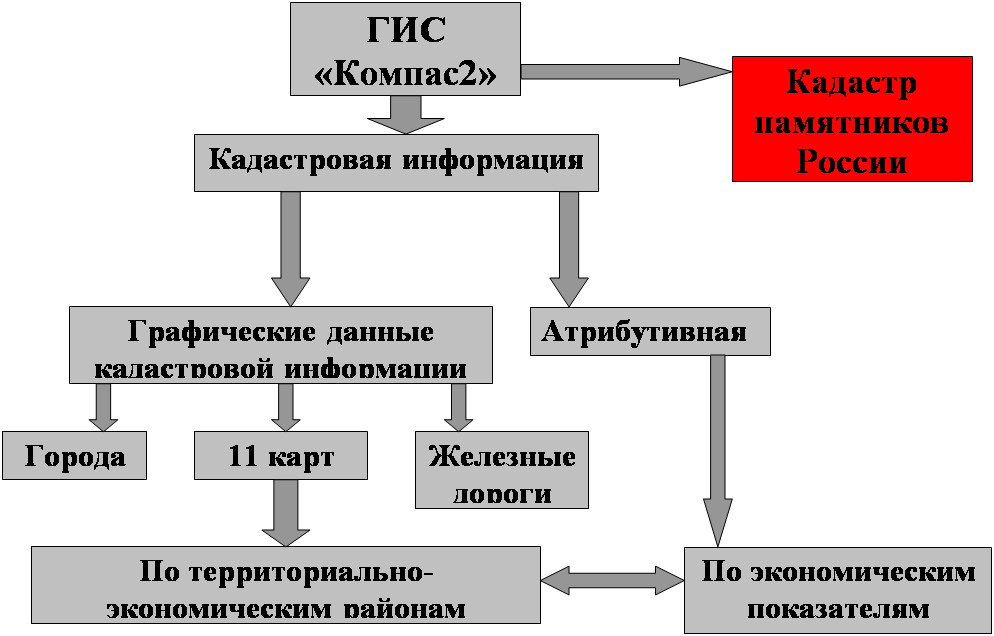
... кадастра памятников России и привязки его к ГИС «Компас-2», я изучил возможности, функции ГИС «Компас-2», а также возможность использования его для создания различных видов природных кадастров. Компас-2 – это сетевая система для представления, моделирования и анализа географической информации Функциональные возможности системы КОМПАС 2: публикация географической информации (ГИ) в сетях ...
0 комментариев