Электронные карты
Геодезическая основа отсчета координат ЭК
Разграфка электронных карт
Формат для обмена картографической информацией
Корректура электронных карт
Основные принципы построения АКС
Обеспечение АКС
Информационно-программное обеспечение НИКС
Другие базы данных
Справочная система НИКС
О НИКС как о центре судовой информационной сети
Планирование пути
Контроль прохождения маршрута
Регистрация информации
Управление движением судна
Анализ информации основных внешних навигационных датчиков НИКС
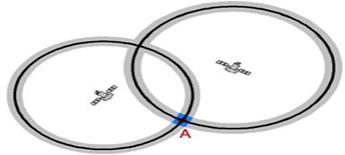
Анализ информации СНС
Краткая характеристика системы «ГЛОНАСС»
Автоматические идентификационно-информационные системы
Функции АИС, предоставляемые сведения, частота обновления данных
Ограничения АИС
Погрешности, обусловленные ошибками датчиков информации
Данные ЭК и их структура
Предварительная прокладка
IEC Protocol 61162-1 "Digital Interfaces - .Navigation and Radiocommunication Equipment On Board Ship"
Навигация
Основные принципы построения АКС
Электронные системы отображения навигационных карт
223834
знака
6
таблиц
7
изображений
2.1.2 Основные принципы построения АКС
Основными принципами построения АКС служат: системный подход, модульность и иерархичность, переход на единые дискретные основы построения аппаратуры, стандартизация оборудования, повышенная надежность, приоритет оператора, самоконтроль.
Системный подход заключается в учете всех особенностей автоматизируемого процесса, всех существенных связей между различными частями системы, между ней и другими системами, между системой и внешней средой, между системой и оператором с целью достижения максимальной эффективности системы.
АКС представляет собой человеко-машинную систему, облегчающую судоводителю принятие решений. Поэтому объем, структура и форма предоставляемой судоводителю информации должна учитывать как особенности автоматизируемого процесса, так и психофизиологические качества человека.
Для связи с другими системами, используемыми при решении задач судовождения, центральная система автоматизированных комплексов судовождения — НИКС должна обеспечивать ввод данных от курсоуказателей, лагов, радиолокатора, САРП, приемников систем определения места, приемника NAVTEX, автоматической идентификационной системы и вывод данных в систему управления движением судна. Она должна также обеспечивать возможность получения информации через всемирную сеть Интернет. Для получения оперативной информации об условиях на пути следования, для поддержания баз данных на уровне современности НИКС должна иметь возможность приема информации от внешних источников по каналам связи. Кроме того, другие приборы, устройства и системы, входящие в АКС, должны иметь возможность принимать информацию, требуемую при их функционировании.
На основе системного подхода намечается общая структура системы, состав информационного, математического и лингвистического обеспечения, организация взаимодействия с другими системами и ряд других вопросов.
Модульность состоит в разделении аппаратуры и/или Программного обеспечения на отдельные, в определенной мере автономные структуры (модули, блоки, подсистемы), которые могут функционировать как отдельно при решении своих локальных задач, так и совместно при решении общей задачи. Модульное построение облегчает приспособление систем к особенностям судов и к отличиям выполняемых ими задач и облегчает расширение функций систем при их совершенствовании.
Иерархичность означает такую организацию структуры системы и ее программного обеспечения, когда модули располагаются по уровням их значимости. Модули на низшем уровне решают узкие задачи, а другие модули, высшие по иерархии, обеспечивают решение задач более высокого уровня путем управления и коррекции модулей низшего уровня.
Переход на единые дискретные принципы аппаратуры означает построение ее на основе микропроцессорной техники. Такое построение позволяет более просто и надежно организовывать взаимодействие между частями системы, а также между системой и другим оборудованием.
В современных навигационных приборах и системах, в системах управления движением судна уже широко применяется микропроцессорная техника - цифровые ГК, цифровые авторулевые, не говоря уже о современных радиолокаторах, САРП, приемоиндикаторах береговых и космических радионавигационных систем, в которых широко использована микропроцессорная техника.
Стандартизация оборудования направлена на обеспечение требуемых эксплуатационных характеристик и совместимости различного вида навигационной аппаратуры, выпускаемой различными фирмами и организациями.
Эксплуатационные требования к морским навигационным приборам и системам определяются ИМО. Технические стандарты к электрическому и электронному оборудованию вырабатываются международной электротехнической комиссией - МЭК (IEC).
МЭК также определяет протокол взаимодействия входящих в АКС устройств Создание информационных систем и сетей открыло возможность разработки международных стандартов определяющих, как должны взаимодействовать между собой компоненты этих систем и сетей. Во всех странах эти стандарты называются протоколами. Протокол в информационной системе - это документ, четко определяющий процедуры и правила взаимодействия входящих и подключаемых к системе устройств. Протокол определяет список команд, которыми могут обмениваться устройства, порядок передачи команд, правила, взаимной проверки работы, размеры передаваемых блоков информации и т.д. Протоколы создаются для того, чтобы изготавливаемые разными объединениями и фирмами устройства могли работать друг с другом.
Стандарты взаимодействия навигационной аппаратуры установлены протоколом IEC 61162-1. Этот протокол совпадает по содержанию с протоколом l'^MEA-0183 национальной морской электронной ассоциации США (NMEA - National Maritime Electronic Association).
В рамках автоматизированных комплексов судовождения НИКС может быть сопряжена с курсоуказателем, лагом, системами, обеспечивающими непрерывное местоопределение (приемниками РНС и СНС), РЛС, САРП, эхолотом, транспонднром АИС, авторулевым, автоматической системой дистанционного управления движительной установкой; приемником NAVTEX и системами связи. Другие приборы, входящие в АКС, также должны взаимодействовать между собой. Так, гирокомпас для автоматической корректировки скоростной погрешности должен иметь возможность получать информацию о скорости от лага, широту места от НИКС либо приемника РНС или СНС; адаптивный авторулевой должен быть сопряжен с гирокомпасом, лагом, эхолотом, датчиком угловой скорости, и т.д. Взаимодействие входящих в АКС устройств и систем в настоящее время определяется протоколом ВЕС 61162-1.
Таким образом, датчики информации, устройства управления и другое оборудование различных фирм, выполняющие протокол IEC 61162-1, могут работать совместно с НИКС. Приборы и системы, входящие в АКС; не должны ухудшать характеристики сопрягаемой с ними аппаратуры.
Повышенная надежность технического и программного обеспечения АКС обусловливается повышенной опасностью Процесса судовождения, высокой стоимостью объекта управления, перевозимого груза и тяжелыми экологическими последствиями аварий судов. В АКС должны быть предусмотрены средства резервирования, повышающие надежность системы и обеспечивающие навигационную безопасность плавания на протяжении части рейса, оставшейся после выхода АКС из строя. Система и сопрягаемые с ней устройства должны работать при отклонениях от номинальных значений параметров судового электропитания и иметь возможность работы от аварийных источников при перерывах в подаче электроэнергии.
Самоконтроль. Ввиду повышенной опасности процесса судовождения, возможных больших убытков от неправильного функционирования, сбоев и выхода из строя, в АКС должен реализовываться автоматический контроль за работой аппаратуры и автоматическая диагностика неисправных элементов. Кроме того, в АКС должны быть и средства проверки правильности работы программного обеспечения. При сбоях в работе и появлении неисправности должна срабатывать сигнализация.
Приоритет оператора. Ввиду невозможности запрограммировать все ситуации, которые могут возникнуть в процессе судовождения, и учесть с помощью средств автоматизации все влияющие на этот процесс факторы, главная роль в принятии решений в этом процессе отводится судоводителю. АКС представляет собой только инструмент, назначение которого - максимальная помощь судоводителю в обеспечении безопасного плавания. Ответственность за принятые решения лежит полностью на судоводителе. Поэтому он должен уметь эффективно использовать средства автоматизации, знать ограничения и недостатки этих средств, использовать малейшую возможность для контроля их работы и правильности получаемой от них информации.
Похожие работы
... электронных карт осуществляет IHO во взаимодействии с IMO . Электронная карта охватывает как термин три понятия : описание данных ; программное обеспечение для их обработки ; электронную систему отображения данных . Электронные карты могут быть , а могут и не быть эквивалентными бумажным картам , требуемым конвенцией СОЛАС-74 . Понятия хранения / передачи и отображения данных электронной ...
... времени могут быть также переданы в программные пакеты которым необходима информация для всевозможного моделирования, например создания цифровых моделей местности (ЦММ). Выводы: 1) Система глобального позиционирования являет собой инструмент с огромным потенциалом и широчайшим кругом использования. 2) Навигационные возможности систем могут оказать неоценимую помощь в поиске и спасении людей, в ...

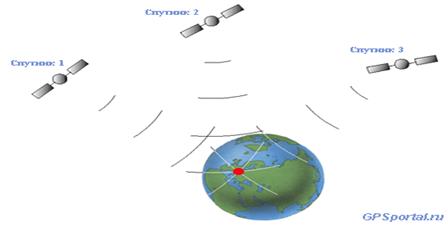


... , что считается другими государствами её главным недостатком. Более известна под названием GPS. Единственная полностью работающая спутниковая навигационная система. · ГЛОНАСС Глобальная навигационная спутниковая система (ГЛОНАСС) – советская и российская спутниковая система навигации, разработанная по заказу Министерства обороны СССР. Принадлежит министерству обороны России. Является попыткой ...
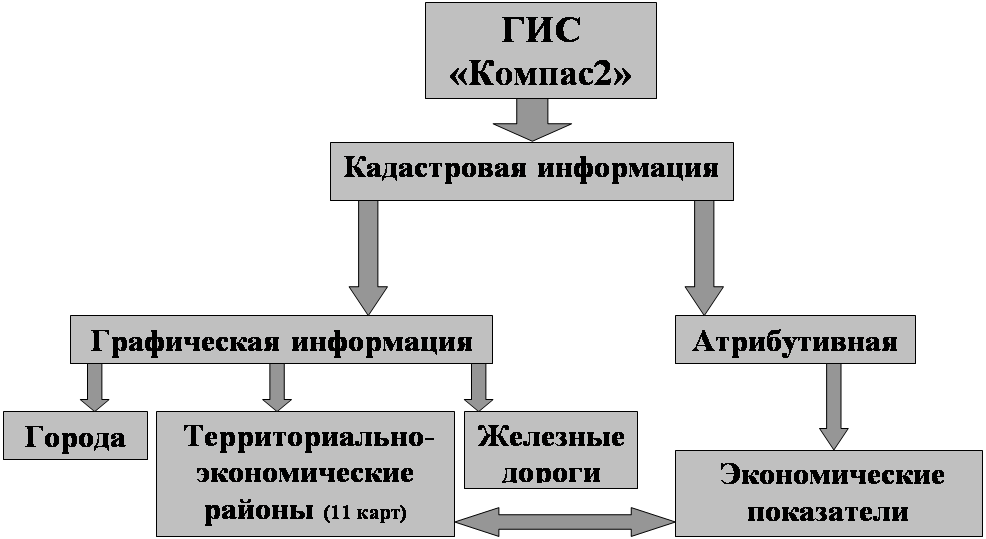
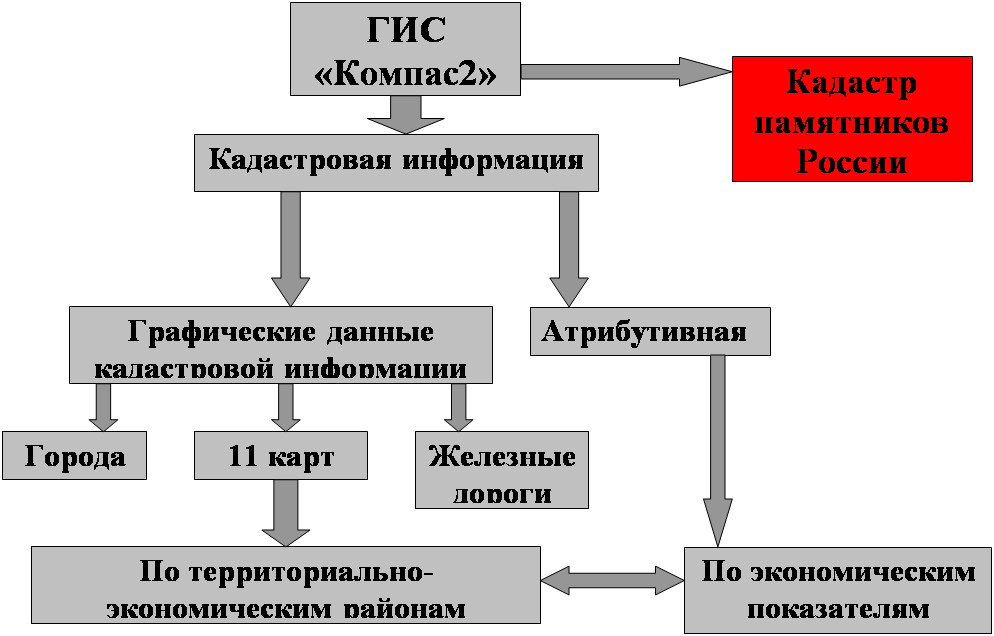
... кадастра памятников России и привязки его к ГИС «Компас-2», я изучил возможности, функции ГИС «Компас-2», а также возможность использования его для создания различных видов природных кадастров. Компас-2 – это сетевая система для представления, моделирования и анализа географической информации Функциональные возможности системы КОМПАС 2: публикация географической информации (ГИ) в сетях ...
0 комментариев