Навигация
Механизм долбежного станка с качающейся кулисой
10457
знаков
4
таблицы
11
изображений
МГТУ «МАМИ»
Кафедра: «Теория механизмов и машин»
КУРСОВОЙ ПРОЕКТ
Механизм долбежного станка с качающейся кулисой
Содержание
1. Исходные данные
2. Структурный анализ механизма
3. Построение положений механизма
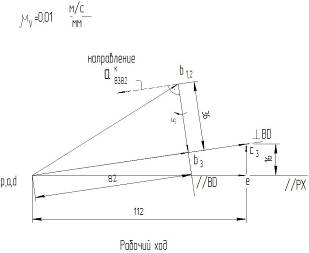
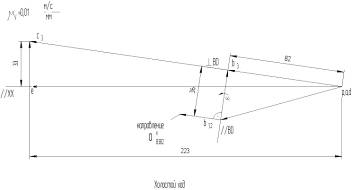
4. Построение планов скоростей
4.1 План скоростей для рабочего хода
4.2 План скоростей для холостого хода
4.3 План скоростей для верхнего крайнего положения
4.4 План скоростей для нижнего крайнего положения
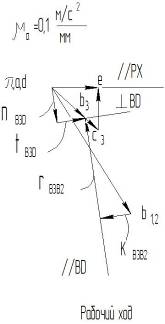
5. Построение планов ускорений
5.1 План ускорений для рабочего хода
5.2 План ускорений для холостого хода
5.3 План ускорений для верхнего крайнего положения
5.4 План ускорений для нижнего крайнего положения
6. Кинетостатический расчет механизма
6.1 Определение сил инерции и сил тяжести звеньев
6.2 Определение реакций в кинематической паре 4-5
6.3 Определение реакций в кинематической паре 3-2
6.4 Определение уравновешивающей силы на кривошипе 1
7. Определение уравновешивающей силы с помощью рычага Жуковского
Список использованной литературы
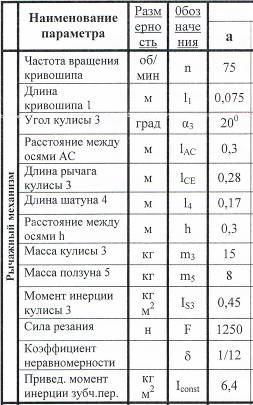
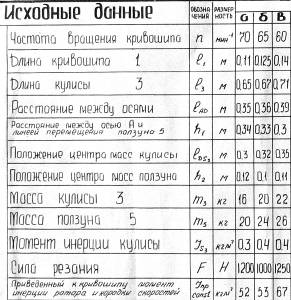
1. Исходные данные
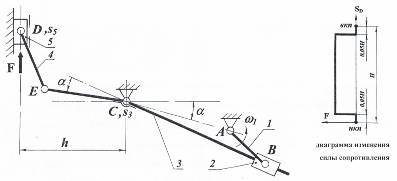
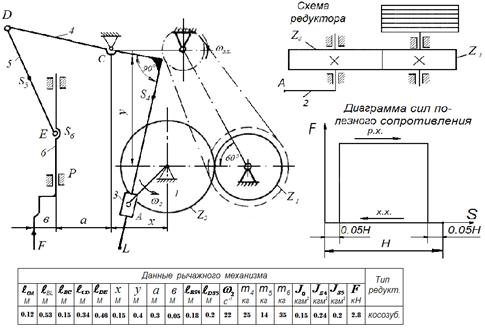
Механизм долбежного станка с качающейся кулисой.
2. Структурный анализ механизма
Определим число степеней свободы механизма по формуле Чебышева:
W= 3n – 2р1 –р2,
где n – число подвижных звеньев механизма,
р1 – число низших кинематических пар,
р2 - число высших кинематических пар.
Согласно структурной схеме механизма число подвижных звеньев n = 5.
Составим таблицу кинематических пар, соединяющих звенья:
| Обозначения кинематической пары | A | B | С | D | Е | П1 | П2 |
| Звенья, образующие кинематическую пару | 0,1 | 1,2 | 3,0 | 4,5 | 3,4 | 2,3 | 5,0 |
| Наименование пары | вращательные | поступа- тельные | |||||
Количество низших кинематических пар: p1=7
Количество высших кинематических пар: p2=0
W= 3 × 5 – 2 × 7 = 1
Механизм имеет одну степень свободы, и значит, в нем должно быть одно начальное звено. За начальное звено принимаем кривошип 1, движение которого задано, на котором требуется определить уравновешивающую силу.
Тогда последовательность образования механизма по Ассуру будет следующей:
Начальное звено 1, стойка 0.
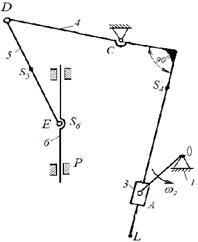
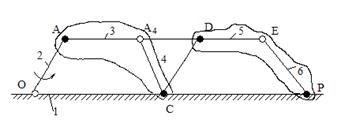
Возможными поводками для присоединения групп Ассура к начальному звену и стойке являются звенья: 2, 3, 5. Из них звенья 2 и 3 образуют двухповодковую группу Ассура 3 вида (ВПВ). В этой группе внешние кинематические пары, которыми звенья группы присоединяются к начальному звену и стойке вращательные: (1 – 2) и (3 – 0), внутренняя кинематическая пара, которая соединяет между собой звенья 2 и 3 – поступательная (2 – 3). Присоединив 2ПГ Ассура 3 вида к начальному звену 1 и стойке 0, получим промежуточный механизм: 0, 1, 2, 3.
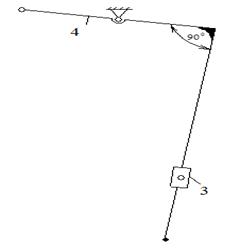
По отношению к промежуточному механизму поводками будут звенья 5 и 4 (образующие кинематические пары со звеньями промежуточного механизма). Звенья 4 и 5 образуют двухповодковую группу Ассура 2 вида (ВВП). В ней внешние кинематические пары: вращательная (3 – 4) и поступательная (5 – 0), внутренняя кинематическая пара – вращательная (4–5).
Таким образом, механизм долбежного станка образован последовательным присоединением к начальному звену 1 и стойке 0 двух двухповодковых групп Ассура - сначала 2ПГ 3 вида, а затем 2ПГ 2 вида.
3. Построение положений механизма
Для построения кинематической схемы исследуемого механизма в различных положениях выбираем масштабный коэффициент длины ![]() , который определяется как:
, который определяется как:
μl = l1 / AB = 0,075 / 15 = 0,005 м/мм
Каждое положение механизма обозначено соответствующим индексом:
I – соответствует верхнему крайнему положению ползуна 5,
II – соответствует нижнему крайнему положению ползуна 5,
III – соответствует рабочему ходу ползуна 5,
IV – соответствует холостому ходу ползуна 5.
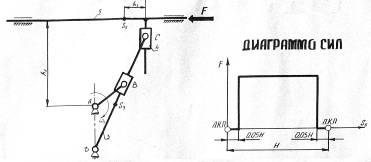
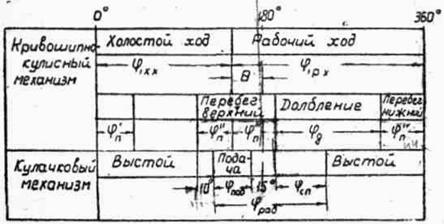
Рабочему ходу ползуна соответствует угол поворота кривошипа φр.х. Холостому ходу – φх.х.
При выборе расчётного рабочего положения используем диаграмму сил F=F(SD), построенную на ходе ползуна 5. В металлорежущих станках процесс резания происходит только на части рабочего хода, соответствующей длине обрабатываемой детали lD. Поэтому выбираем положение кривошипа на угле поворота φр.х, соответствующем рабочему ходу, когда ползун 5 (точка D) находится внутри отрезка lD.
При выборе положения механизма, соответствующего холостому ходу ползуна, берём любое положение кривошипа на угле его поворота φх.х.
Похожие работы
... звеньями промежуточного механизма). Звенья 4 и 5 образуют двухповодковую группу Ассура 5 вида (ВПП). В ней внешние кинематические пары: вращательная (3 – 4) и поступательная (5 – 0), внутренняя кинематическая пара – поступательная (4 – 0). Таким образом, механизм долбежного станка образован последовательным присоединением к начальному звену 1 и стойке 0 двух двухповодковых групп Ассура - сначала ...
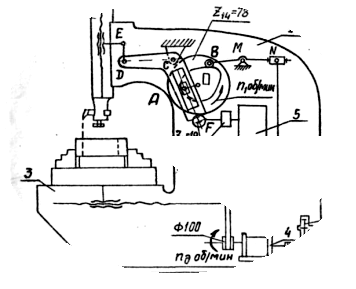
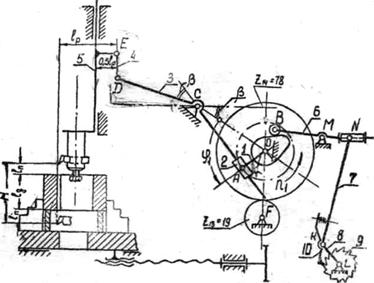
... . Для движения резца используется шестизвенный кривошипно-кулисный механизм с качающейся кулисой, состоящий из кривошипа 1, камня 2, кулисы 3, поводка 4 и ползуна 5 (рис.1-2). Рис. 2. Схема кривошипно-кулисного механизма движения резца и кулачкового механизма подачи стола долбежного станка. Ход ползуна Н выбирается в зависимости от длины lд обрабатываемой поверхности с учетом перебегов lп в ...
... для него план механизма. Построили диаграмму усилий, действующее на исполнительное звено, и если необходимо, построили 2 плана положений соответствующие началу и концу действия сил полезного сопротивления. Структурный анализ механизма 1. Выписываем кинематические пары определяя класс и вид 1–2 – вращ., 5 кл 2–3 – вращ., 5 кл 3–4 – поступ., 5 кл 4–1 – вращ., 5 кл 4–5 – вращ., 5 кл 5–6 – ...
... б) с точечным формообразующим контактом 1 2 силовое 5 Плоская а) обычная б) с пальцем 3 2 Силовое Силовое и геометрическое 4. СТРУКТУРНЫЕ СВОЙСТВА МЕХАНИЗМОВ 4.1. Сложность N механизма. В металлорежущих станках сложные подвижные механические системы, передающие движения от входного звена к выходному (шпиндель, суппорт и ...
0 комментариев