Навигация
Кинематический и силовой расчет механизма долбежного станка с качающейся кулисой
10602
знака
4
таблицы
11
изображений
МГТУ «МАМИ»
КУРСОВОЙ ПРОЕКТ
Кинематический и силовой расчет механизма долбежного станка с качающейся кулисой
Москва
2010
Содержание
1. Исходные данные
2. Структурный анализ механизма
3. Построение положений механизма
4. Построение планов скоростей
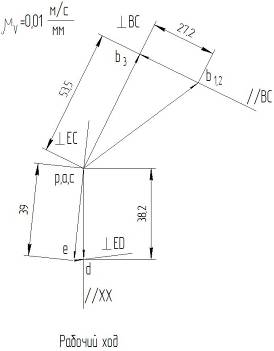
4.1 План скоростей для рабочего хода
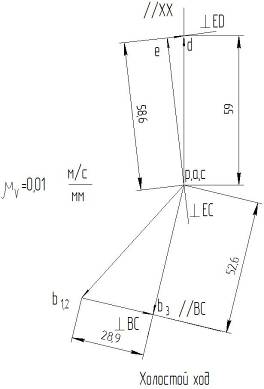
4.2 План скоростей для холостого хода
4.3 План скоростей для верхнего крайнего положения
4.4 План скоростей для нижнего крайнего положения
5. Построение планов ускорений
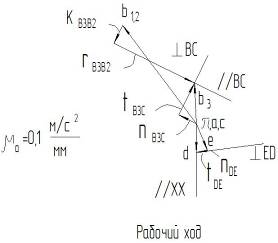
5.1 План ускорений для рабочего хода
5.2 План ускорений для холостого хода
5.3 План ускорений для верхнего крайнего положения
5.4 План ускорений для нижнего крайнего положения
6. Кинетостатический расчет механизма
6.1 Определение сил инерции и сил тяжести звеньев
6.2 Определение реакций в кинематической паре 4-5
6.3 Определение реакций в кинематической паре 3-2
6.4 Определение уравновешивающей силы на кривошипе 1
7. Определение уравновешивающей силы с помощью рычага Жуковского
Список использованной литературы
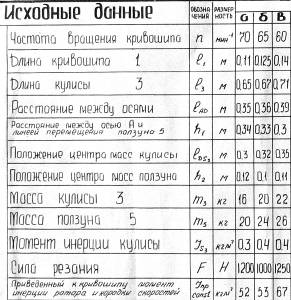
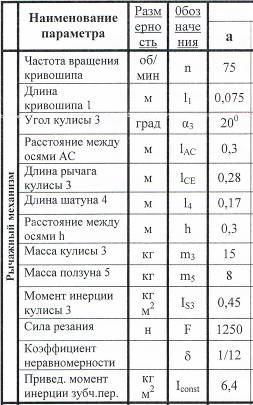
1. Исходные данные
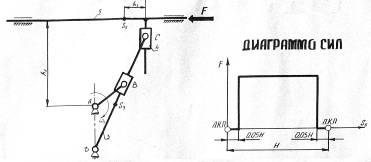
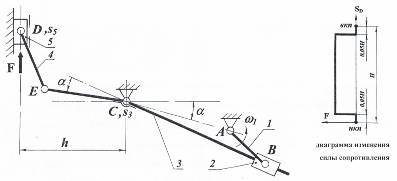
Механизм долбежного станка с качающейся кулисой.
2. Структурный анализ механизма
Определим число степеней свободы механизма по формуле Чебышева:
W= 3n – 2р1 –р2,
где n – число подвижных звеньев механизма,
р1 – число низших кинематических пар,
р2 - число высших кинематических пар.
Согласно структурной схеме механизма число подвижных звеньев n = 5.
Составим таблицу кинематических пар, соединяющих звенья:
| Обозначения кинематической пары | A | B | C | D | П1 | П2 | П3 |
| Звенья, образующие кинематическую пару | 0,1 | 1,2 | 3,4 | 3,0 | 2,3 | 4,0 | 5,0 |
| Наименование пары | вращательные | поступа- тельные | |||||
Количество низших кинематических пар: p1=7
Количество высших кинематических пар: p2=0
W= 3 × 5 – 2 × 7 = 1
Механизм имеет одну степень свободы, и значит, в нем должно быть одно начальное звено. За начальное звено принимаем кривошип 1, движение которого задано, на котором требуется определить уравновешивающую силу.
Тогда последовательность образования механизма по Ассуру будет следующей:Начальное звено 1, стойка 0.
Возможными поводками для присоединения групп Ассура к начальному звену и стойке являются звенья: 2, 3, 5. Из них звенья 2 и 3 образуют двухповодковую группу Ассура 3 вида (ВПВ). В этой группе внешние кинематические пары, которыми звенья группы присоединяются к начальному звену и стойке вращательные: (1 – 2) и (3 – 0), внутренняя кинематическая пара, которая соединяет между собой звенья 2 и 3 – поступательная (2 – 3). Присоединив 2ПГ Ассура 3 вида к начальному звену 1 и стойке 0, получим промежуточный механизм: 0, 1, 2, 3.
По отношению к промежуточному механизму поводками будут звенья 5 и 4 (образующие кинематические пары со звеньями промежуточного механизма). Звенья 4 и 5 образуют двухповодковую группу Ассура 5 вида (ВПП). В ней внешние кинематические пары: вращательная (3 – 4) и поступательная (5 – 0), внутренняя кинематическая пара – поступательная (4 – 0).
Таким образом, механизм долбежного станка образован последовательным присоединением к начальному звену 1 и стойке 0 двух двухповодковых групп Ассура - сначала 2ПГ 3 вида, а затем 2ПГ 5 вида.
Похожие работы
... Звенья 4 и 5 образуют двухповодковую группу Ассура 2 вида (ВВП). В ней внешние кинематические пары: вращательная (3 – 4) и поступательная (5 – 0), внутренняя кинематическая пара – вращательная (4–5). Таким образом, механизм долбежного станка образован последовательным присоединением к начальному звену 1 и стойке 0 двух двухповодковых групп Ассура - сначала 2ПГ 3 вида, а затем 2ПГ 2 вида. 3. ...
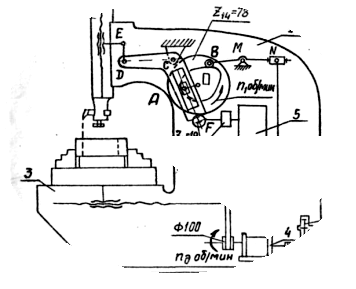
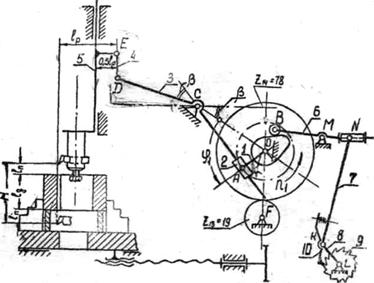
... . Для движения резца используется шестизвенный кривошипно-кулисный механизм с качающейся кулисой, состоящий из кривошипа 1, камня 2, кулисы 3, поводка 4 и ползуна 5 (рис.1-2). Рис. 2. Схема кривошипно-кулисного механизма движения резца и кулачкового механизма подачи стола долбежного станка. Ход ползуна Н выбирается в зависимости от длины lд обрабатываемой поверхности с учетом перебегов lп в ...
0 комментариев