Навигация
2.1 Расчет профиля кулачка
Исходные данные:
1.Ход толкателя – 5 мм;
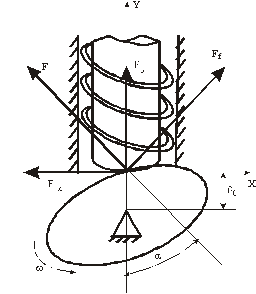
Рис.1 Кинематическая схема кулачкового механизма.
Закон движения функция sin для j от 00 до 900.
1.1.1 Определение начального радиуса кулачка
Радиус-вектор, описывающий профиль кулачка, определяется по формуле: ![]() ,
,
где ![]() - начальный минимальный радиус, который выбирается конструктивно, но от него зависит угол давления a.
- начальный минимальный радиус, который выбирается конструктивно, но от него зависит угол давления a.
![]() - закон изменения хода толкателя от угла поворота толкателя j.
- закон изменения хода толкателя от угла поворота толкателя j.
Т.к. в данном механизме необходимо обеспечить движение толкателя с постоянной скоростью (программа - линейная), то используем кулачок с профилем спирали Архимеда. Для нашего случая рабочего кулачка выбираем рабочий угол 3600, значит:
![]() , [2](1)
, [2](1)
На рис.1 ![]() - угол, по которому изменяется радиус кулачка;
- угол, по которому изменяется радиус кулачка; ![]() ;
;
a - угол давления толкателя.
Для кулачков центрального действия a принимаем равным ![]() .
.
Так как ход толкателя ![]() , то значение R и
, то значение R и ![]() необходимо выбирать из расчета
необходимо выбирать из расчета
![]() (2)
(2)
примем ![]() мм, и угол по которому изменяется радиус кулачка
мм, и угол по которому изменяется радиус кулачка ![]() , тогда угол давления толкателя на кулачек
, тогда угол давления толкателя на кулачек
![]() (3)
(3)
![]() (4)
(4)
![]()
![]() условие выполняется
условие выполняется
1.1.2 Определение профиля кулачка
Рабочий угол кулачка равный![]() (5)
(5)
![]()
Далее по данным таблицы построим профиль кулачка.
Таблица 1|
|
|
|
|
|
|
|
| |||
| 0 | 18 | 95 | 20,01 | 190 | 21,68 | 285 | 22,73 | |||
| 5 | 18,10 | 100 | 20,11 | 195 | 21,75 | 290 | 22,76 | |||
| 10 | 18,21 | 105 | 20,21 | 200 | 21,83 | 295 | 22,8 | |||
| 15 | 18,32 | 110 | 20,3 | 205 | 21,89 | 300 | 22,82 | |||
| 20 | 18,43 | 115 | 20,4 | 210 | 21,96 | 305 | 22,85 | |||
| 25 | 18,54 | 120 | 20,5 | 215 | 22,03 | 310 | 22,88 | |||
| 30 | 18,65 | 125 | 20,59 | 220 | 22,09 | 315 | 22,9 | |||
| 35 | 18,76 | 130 | 20,68 | 225 | 22,15 | 320 | 22,92 | |||
| 40 | 18,86 | 135 | 20,77 | 230 | 22,21 | 325 | 22,94 | |||
| 45 | 18,97 | 140 | 20,86 | 235 | 22,27 | 330 | 22,95 | |||
| 50 | 19,08 | 145 | 20,95 | 240 | 22,33 | 335 | 22,97 | |||
| 55 | 19,18 | 150 | 21,04 | 245 | 22,38 | 340 | 22,98 | |||
| 60 | 19,29 | 155 | 21,12 | 250 | 22,43 | 345 | 22,98 | |||
| 65 | 19,39 | 160 | 21,21 | 255 | 22,48 | 350 | 22,99 | |||
| 70 | 19,5 | 165 | 21,29 | 260 | 22,53 | 355 | 22,99 | |||
| 75 | 19,6 | 170 | 21,37 | 265 | 22,57 | 360 | 23 | |||
| 80 | 19,71 | 175 | 21,45 | 270 | 22,61 | |||||
| 85 | 19,81 | 180 | 21,53 | 275 | 22,66 | |||||
| 90 | 19,91 | 185 | 21,61 | 280 | 22,69 |
Rmin=18 мм, Rmax=26 мм.
Похожие работы
... 5 установить в опоры скольжения корпуса поз.11. 7. Установить крышку поз12 и прикрутить ее винтами поз.15 и штифтами поз.20. Заключение В курсовом проекте спроектирован редуктор программного механизма. Все требования удовлетворены, и поставленные задачи выполнены. Достигнута необходимая точность работы устройства. В конструкции имеются унифицированные детали. Использованы типовые методы ...
... программного комплекса ведется на основании задания на дипломную работу, утвержденное приказом ректора Донбасской машиностроительной академии по ГОСТ 19.101-77. Тема дипломной работы – «Программно – методический комплекс для мультимедийного представления учебной информации». Спецчасть разработки – «Разработка программного обеспечения для интерфейса оболочки комплекса и примера информационного ...
... версии не обязательно получает все права, изначально предоставляемые Apache лицензией. При распространении программного обеспечения необходимо поместить следующие файлы в корневую директорию: LICENSE — Файл, содержащий копию лицензии Apache. NOTICE — Текстовый файл, перечисляющий все библиотеки, лицензированные Apache лицензией вместе с именами их создателей. В каждом лицензируемом файле ...
... знания – знания, состоящие из мыслимых объектов, называющиеся понятиями. Существует два вида неалгоритмических знаний: концептуальные (понятийные) и фактуальные (предметные). Структура и состав системного программного обеспечения (СПО). Структура СПО: ОС– операционная система. ППП– пакеты прикладной программы. КПТО– комплекс программ технического обслуживания. УП– управляющая программа. СП– ...
0 комментариев