Навигация
Силовой расчет кулачкового механизма
32802
знака
1
таблица
6
изображений
1.2 Силовой расчет кулачкового механизма
Раскладываем силу нормального давления P на Р1 и Р2.
Р1 – направляющая по движению толкателя, Р2 – перпендикулярная Р1 составляющая.
 (6)
(6)
Р1 – движущая сила, она используется для преодоления сил полезных сопротивлений; Р2 – сила, изгибающая толкатель и вызывающая реакции NB и NC его направляющих.
На рис.3 Q - сила, прижимающая толкатель к кулачку, обычно является равнодействующей сил, приведенных к толкателю.
QПС - сила полезного сопротивления;
QПР - сила давления пружины;
QТ - сила тяжести;
РИ - сила инерции.
Q= QПС+ QПР+ QТ+ РИ, [1, с.231](7)
При выходном звене типа «толкатель-стержень» угол давления g=300. Точка О на рис.3 – это точка давления толкателя.
При скольжении толкателя по кулачку возникает приведенная сила трения:
FПР=РfПР=РtgjПР.(8)
Здесь fПР=РtgjПР – приведенный коэффициент трения, jПР – приведенный угол трения.
Выбираем из пары материалов fПР=0,18 =>
jПР=arctgfПР,
jПР=arctg0,18=10,20.(9)
Полная сила давления кулачка на толкатель является равнодействующей сил РИ, FПР и равна:
![]() ,(10)
,(10)
![]() ,
,
где Р=6 Н из Т.3
Раскладывая Рn на две составляющие получаем:
1. Рnsin(g+jПР) – силу, изгибающую толкатель и вызывающие реакции NB и NC его направляющих, от величины которых зависят значения сил трения FB и FC;
g=300 – угол давления; jПР=10,20,
Рnsin(300+10,20)=3,9328 Н.
2. Рncos(g+jПР)- силу, движущую толкатель, который преодолевает действие сил Q, FB и FC
Рncos(300+10,20)=4,6523 Н.
Т.к. в силу Q включены силы инерции РИ, то на основании принципа Даламбера система времени, действующих в механизме в любой момент времени, должна находиться в равновесии и удовлетворять следующим трем условиям:
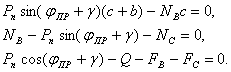 (11)
(11)
Решая первые 2 уравнения, определим опорные реакции в направляющих толкателя NB и NC:
![]() (12)
(12)
![]() (13)
(13)
Зададимся размерами толкателя.
b – расстояние от окончания толкателя до первой опоры, b=15 мм,
с - расстояние от первой до второй опор, с=25 мм,
Н – длина толкателя, Н=b+c=15+25=40 мм.
NB=6,2923 H,NC=2,3596 H.
Определим силы трения:
 (14)
(14)

Определим силу, прижимающую толкатель к кулачку Q:
![]() (15)
(15)
Определим силу полного давления кулачка на толкатель:
 (16)
(16)
![]() =6,092 Н
=6,092 Н
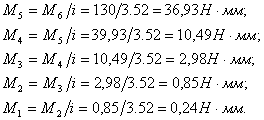
2.3 Расчет цилиндрической пружины толкателя
Для в качестве материала выбираем проволоку II класса (по ГОСТ 9389-75) с повышенной эластичностью 60С2А (пружина ответственная). Цилиндрические винтовые пружины сжатия рассчитываются из условий прочности витка пружины на кручение.
ПО условиям работы пружины определяем:
1.Нагрузку пружины:
· Наибольшая Рmax=6 H (из Т.3 наибольшее давление на толкатель);
· Наименьшая Рmin![]() Рmax, Рmin=0,6 Рmax=3,6 Н.
Рmax, Рmin=0,6 Рmax=3,6 Н.
· Предельно допустимая: Рдоп![]() Рmax. Рдоп=
Рmax. Рдоп=![]() .
.
2.Рабочий ход (деформация) пружины:
H=f1-f2,(17)
h учитывается при изменении нагрузки от Рminдо Рmax. В нашем случае рабочий ход пружины равен ходу толкателя, т.е. h=5 мм.
Зададимся индексом пружины: с=D/d=12.
Для выбранного нами материала предел прочности sВ=650 МПа, допускаемое напряжение [t]=325 МПа, коэффициент, учитывающий увеличение напряжения во внутренней стороне витка:
![]()
Определим диаметр проволоки, обеспечивающей пружине с заданным индексом с прочность:
![]() (19)
(19)
Средний диаметр пружины определим по значениям с и a:
Dср=сa, Dср=8,4 мм.(20)
Dн – наружный диаметр пружины;
Dн=d(c+1),Dн=9,1 мм.(21)
Dв – внутренний диаметр пружины;
Dв=d(c-1),Dв=7,7 мм.(22)
Эластичность пружины (прогиб одного витка под нагрузкой в 1Н):
![]() ,(23)
,(23)
где G=![]() МПа – модуль сдвига.
МПа – модуль сдвига.
![]() мм/Н
мм/Н
Число рабочих витков пружины определяется как
![]() (24)
(24)
где h – рабочий ход (деформация0 пружины, h=5 мм.
n=4
Жесткость пружины:
![]() (25)
(25)
k=0.48 H/мм
Максимальная деформация пружины:
![]() (26)
(26)
где k – жесткость пружины.
![]()
Максимальная деформация одного витка пружины:
 (27)
(27)
Полное число витков пружины N=6 витков; N=n1+n2,
n1 – число рабочих витков, n1=4
n2 - число опорных витков, n2=2.
Шаг пружины при максимальной деформации:
![]() (28)
(28)
t=4.45 мм
Высота пружины при максимальной деформации:
L3=(N+1-n3)d,(29)
где n3 – число зашифрованных витков, n3 =2 мм
L3=6,03 мм.
Высота пружины в свободном состоянии:
L0=L3+l3, L0=21,03 мм.
Рис.3 Цилиндрическая пружина толкателя.
Похожие работы
... 5 установить в опоры скольжения корпуса поз.11. 7. Установить крышку поз12 и прикрутить ее винтами поз.15 и штифтами поз.20. Заключение В курсовом проекте спроектирован редуктор программного механизма. Все требования удовлетворены, и поставленные задачи выполнены. Достигнута необходимая точность работы устройства. В конструкции имеются унифицированные детали. Использованы типовые методы ...
... программного комплекса ведется на основании задания на дипломную работу, утвержденное приказом ректора Донбасской машиностроительной академии по ГОСТ 19.101-77. Тема дипломной работы – «Программно – методический комплекс для мультимедийного представления учебной информации». Спецчасть разработки – «Разработка программного обеспечения для интерфейса оболочки комплекса и примера информационного ...
... версии не обязательно получает все права, изначально предоставляемые Apache лицензией. При распространении программного обеспечения необходимо поместить следующие файлы в корневую директорию: LICENSE — Файл, содержащий копию лицензии Apache. NOTICE — Текстовый файл, перечисляющий все библиотеки, лицензированные Apache лицензией вместе с именами их создателей. В каждом лицензируемом файле ...
... знания – знания, состоящие из мыслимых объектов, называющиеся понятиями. Существует два вида неалгоритмических знаний: концептуальные (понятийные) и фактуальные (предметные). Структура и состав системного программного обеспечения (СПО). Структура СПО: ОС– операционная система. ППП– пакеты прикладной программы. КПТО– комплекс программ технического обслуживания. УП– управляющая программа. СП– ...
0 комментариев