Навигация
Точность червячной передачи
32802
знака
1
таблица
6
изображений
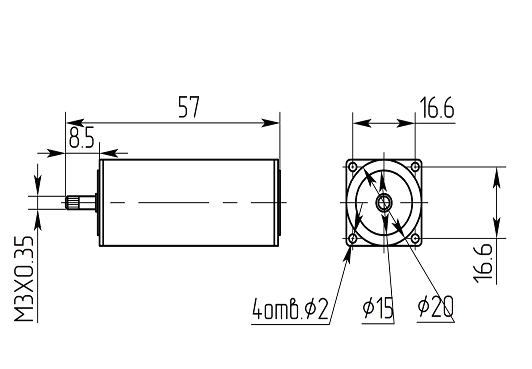
4.4 Точность червячной передачи
Точность изготовления червячных механизмов и их элементов регламентирована СТ СЭВ 1513-79 (для ![]() ).
).
В системах управления и регулирования, в точных приборах применяют зубчатые механизмы 7-й степени точности (точные). Основными причинами, влияющими на точность кинематических цепей с червячными передачами являются зазоры в кинематических парах, погрешности изготовления деталей и сборки механизма, а также силовые и температурные деформации деталей.
Произведем расчет ошибки мертвого хода.
Мертвый ход является следствием наличия зазоров в кинематических парах механизма и упругих деформаций его деталей (упругий мертвый ход). Он понижает точность механизма, способствует увеличению динамических нагрузок, появлению вибрации и шума.
Мертвый ход на валу червячного колеса:
![]() (81)
(81)
где R1 - радиус делительной окружности колеса;
g - угол подъема винтовой линии червяка.
![]() (82)
(82)
![]() наибольший вероятный боковой зазор между зубьями колеса и витками червяка.
наибольший вероятный боковой зазор между зубьями колеса и витками червяка.
R2=0,5mz2,(83)
R2=13,5 мм.
Для m=0,4, межосевого расстояния av=18,8 мм, и допуска H7 выбираем по гост 9178-81
![]()
![]()
Мертвый ход на валу червяка:
![]()
![]()
4.5 Силовой расчет червячной передачи
Пусть к валу колеса приложен крутящий момент. Нормальная сила N приложена в полюсе зацепления. Разложим силу N , таким образом, чтобы получить взаимно перпендикулярные силы: окружные P12, P21 , радиальные Q12, Q21 и осевые T12, T21.
Окружная сила на червяке P21 равна осевой T21 на колесе:
P21= T21=2Мк/d2,(84)
Мк - крутящий момент
P21= T21=1,426 H
Радиальные силы на червяке и колесе Q12, Q21 равны между собой, но направлены в противоположные стороны:
Q12=Q21= P12tga(85)
Q12=Q21=0,53 H.
a -угол профиля в осевом сечении.
Осевая сила на колесе T12 равна окружной силе на червяке P21, но направлена в противоположную сторону:
P21= T12= P12tg(g+j)(86)
g=50, j=3,4160
T12=0,2059 H.
Нормальная сила:
![]() (87)
(87)
![]()
Расчетная нагрузка
При расчете зубьев колеса на прочность расчетная удельная нагрузка определяется по формуле:
![]() (88)
(88)
kk- коэффициент концентрации нагрузки, kk=1;
kD- коэффициент динамичности нагрузки.
Т.к. vs<3 м/с , то kD=1-1,1.
d2=z2m=27 мм,
d1=qm=4.8 мм,
Pp=0,267 H.
Удельная нагрузка:
p=![]() (89)
(89)
p=0.267 H.
4.6 Расчет зубьев на контактную прочность
Преобразуем формулу Герца  , взяв ее за теоретическую основу, в соответствии с геометрическими особенностями червячного зацепления.
, взяв ее за теоретическую основу, в соответствии с геометрическими особенностями червячного зацепления.
![]() (90)
(90)
где ![]() - приведенный радиус кривизны в точке контакта, равный
- приведенный радиус кривизны в точке контакта, равный ![]() - радиусу кривизны профиля зуба колеса.
- радиусу кривизны профиля зуба колеса.
Т.о., получаем формулу для контактного напряжения:
 (91)
(91)
E - приведенный радиус кривизны для червяка.
![]() допускаемое контактное напряжение.
допускаемое контактное напряжение.
![]() [1, с.202] с учетом материала червяка Сталь HRC 45, тогда
[1, с.202] с учетом материала червяка Сталь HRC 45, тогда ![]()
Таким образом, ![]()
Похожие работы
... 5 установить в опоры скольжения корпуса поз.11. 7. Установить крышку поз12 и прикрутить ее винтами поз.15 и штифтами поз.20. Заключение В курсовом проекте спроектирован редуктор программного механизма. Все требования удовлетворены, и поставленные задачи выполнены. Достигнута необходимая точность работы устройства. В конструкции имеются унифицированные детали. Использованы типовые методы ...
... программного комплекса ведется на основании задания на дипломную работу, утвержденное приказом ректора Донбасской машиностроительной академии по ГОСТ 19.101-77. Тема дипломной работы – «Программно – методический комплекс для мультимедийного представления учебной информации». Спецчасть разработки – «Разработка программного обеспечения для интерфейса оболочки комплекса и примера информационного ...
... версии не обязательно получает все права, изначально предоставляемые Apache лицензией. При распространении программного обеспечения необходимо поместить следующие файлы в корневую директорию: LICENSE — Файл, содержащий копию лицензии Apache. NOTICE — Текстовый файл, перечисляющий все библиотеки, лицензированные Apache лицензией вместе с именами их создателей. В каждом лицензируемом файле ...
... знания – знания, состоящие из мыслимых объектов, называющиеся понятиями. Существует два вида неалгоритмических знаний: концептуальные (понятийные) и фактуальные (предметные). Структура и состав системного программного обеспечения (СПО). Структура СПО: ОС– операционная система. ППП– пакеты прикладной программы. КПТО– комплекс программ технического обслуживания. УП– управляющая программа. СП– ...
0 комментариев