Навигация
Плоский рычажной механизма
29262
знака
0
таблиц
2
изображения
Содержание
1. Кинематический анализ плоского рычажного механизма
1.1. Построение механизма в 12 положениях
1.2. Построение планов мгновенных скоростей
1.3. Построение планов мгновенных ускорений
1.4. Построение диаграммы перемещений
1.5. Построение диаграммы скоростей
1.6. Построение диаграммы ускорений
2. Силовой анализ плоского рычажного механиз
2.1. Определение нагрузок, действующих на звенья механизма
2.2. Силовой расчёт группы звеньев 7, 6
2.3. Силовой расчёт группы звеньев 4, 5
2.4. Силовой расчёт группы звеньев 2, 3
2.5. Силовой расчёт ведущего звена
2.6. Силовой расчёт ведущего звена методом Жуковского
3. Синтез зубчатого механизма
3.1. Определение геометрических параметров зубчатого механизма
3.2. Построение плана линейных скоростей
3.3. Построение плана угловых скоростей
4. Синтез кулачкового механизма
4.1. Построение графика аналогов ускорений
4.2. Построение графика аналогов скоростей
4.3. Построение графика аналогов перемещений
4.4. Нахождение минимального начального радиуса кулачка
4.5. Построение профиля кулачка
Список литературы
1. Кинематический анализ плоского рычажного механизма.
Дано:
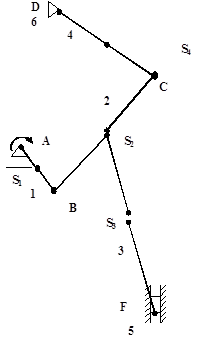
Схема плоский рычажного механизма.
Геометрические параметры механизма:
а=200 мм;
b=200 мм;
lОА=125 мм;
lАВ=325 мм;
lАС=150 мм;
lDE=200 мм;
ω=15 с-1 .
Необходимо построить механизм в 12 положениях, планы мгновенных скоростей для каждого из этих положений, планы мгновенных ускорений для любых 2-х положений, а также диаграммы перемещений, скоростей и ускорений.
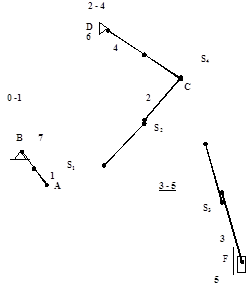
1.1 Построение 12 положений плоского рычажного механизма.
Строим окружность радиусом ОА. Тогда масштабный коэффициент будет:
Выбираем начальное положение механизма и от этой точки делим окружность на 12 равных частей. Центр окружности (т. О) соединяем с полученными точками. Это и будут 12 положений первого звена.
Через т. О проводим горизонтальную прямую линию Х-Х. Затем строим окружности радиусом АВ с центрами в ранее полученных точках. Соединяем точки В0, В1, В2,…,В12 (пересечения окружностей с прямой Х-Х) с точками 0, 1, 2, …, 12. Получим 12 положений второго звена.
От т. О откладываем вверх отрезок b. Получим точку О1. Из неё радиусом О1D проводим окружность.
На отрезках АВ0, АВ1, АВ2, …, АВ12 от точки А откладываем расстояние равное АС. Получим точки С0, С1, С2, …, С12. Через них проводим дуги радиусом DC до пересечения с окружностью с центром в точке О1. Соединяем точки С0, С1, С2, …, С12 с полученными. Это будут 12 положений третьего звена.
Точки D0, D1, D2, …, D12 соединяем с т. О1. Получим 12 положений четвёртого звена.
От самой верхней точки окружности с центром в т.О1 откладываем горизонтально отрезок равный a. Через его конец проводим вертикальную прямую Y-Y. Далее из точек D0, D1, D2, …, D12 строим дуги радиусом DE до пересечения с полученной прямой. Соединяем эти точки с вновь полученными. Это будут 12 положений пятого звена.
Учитывая масштабный коэффициент ![]() , размеры звеньев будут:
, размеры звеньев будут:
АВ= lАВ *![]() =325*0.005=1,625 м;
=325*0.005=1,625 м;
АС= lАС*![]() =150*0,005=0,75 м;
=150*0,005=0,75 м;
СD= lCD*![]() =220*0.005=1.1 м;
=220*0.005=1.1 м;
О1D= lО1D*![]() =150*0,005=0,75 м;
=150*0,005=0,75 м;
DЕ=lDE*![]() =200*0,005=1 м;
=200*0,005=1 м;
а1= а*![]() =200*0,005=1 м;
=200*0,005=1 м;
b1= b*![]() =200*0.005=1 м.
=200*0.005=1 м.
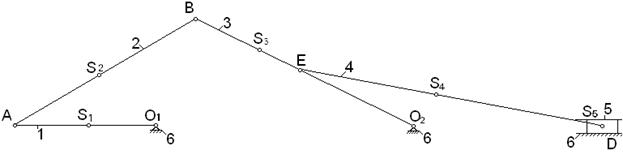
1.2 Построение планов мгновенных скоростей.
Для построения плана скоростей механизма существуют различные методы, наиболее распространённым из которых является метод векторных уравнений.
Скорости точек О и О1 равны нулю, поэтому на плане скоростей совпадают с полюсом плана скоростей р.
Положение 0:
Скорость т.А получаем из уравнения:
![]()
Линия действия вектора скорости т.А перпендикулярна звену ОА, а сам направлен в сторону вращения звена.
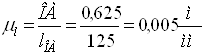
На плане мгновенных скоростей строим отрезок (pа) ┴ ОА, его длина (ра)=45мм. Тогда масштабный коэффициент равен:
Скорость т.В получаем из уравнений:
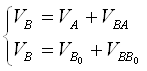 , где VBA┴ ВА, а VВВ0 ║Х-Х
, где VBA┴ ВА, а VВВ0 ║Х-Х
Но скорость т.В совпала с полюсом р, следовательно VB=0, а это значит, что скорости всех остальных точек тоже совпадут с полюсом и будут равны нулю.
Аналогично строятся планы мгновенных скоростей для положений 3, 6, 9, 12.
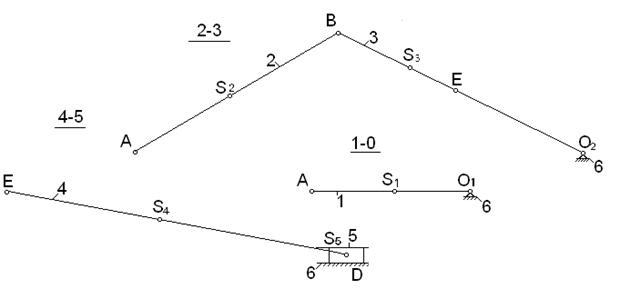
Положение 1:
Скорость т.А получаем из уравнения:

Линия действия вектора скорости т.А перпендикулярна звену ОА, а сам направлен в сторону вращения звена.
На плане мгновенных скоростей строим отрезок (pа) ┴ ОА, его длина (ра)=45мм. Тогда масштабный коэффициент равен:
Скорость т.В получаем из уравнений:
 , где VBA┴ ВА, а VВВ0 ║Х-Х
, где VBA┴ ВА, а VВВ0 ║Х-Х
Из т.a на плане скоростей строим прямую ┴ звену ВС, а из т.р проводим горизонтальную прямую. В пересечении получим т.b. Соединяем т.а и т.b. Это будет вектор скорости т.В (VB).
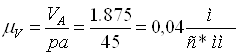
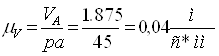
VB = pb*![]() = 0.04*15.3 = 0.612
= 0.04*15.3 = 0.612 ![]()
Скорость т.С определяем с помощью теоремы подобия и правила чтения букв. Правило чтения букв заключается в том, что порядок написания букв на плане скоростей или ускорений жёсткого звена должен в точности соответствовать порядку написания букв на самом звене.
Из пропорции:
 , можно определить длину отрезка ас:
, можно определить длину отрезка ас:

Отложим от т.а отрезок равный 19,2 мм, получим т.с, соединим её с полюсом, получим вектор скорости т.С (VC).
Скорость т.D определяется с помощью решения системы геометрических уравнений:
 , где VDC┴ DC, а VDO1┴ DO1
, где VDC┴ DC, а VDO1┴ DO1
Из т.c на плане скоростей строим прямую ┴ звену DС, а из т.р проводим прямую ┴ DO1. В пересечении получим т.d. Соединяем т.d с полюсом, получим вектор скорости т.D (VD).
VD= pd*![]() = 0.04*37.4 = 1.496
= 0.04*37.4 = 1.496 ![]()
Скорость т.Е находим также из решения системы уравнений:
 , где VED┴ ED, а VEE0 ║Y-Y
, где VED┴ ED, а VEE0 ║Y-Y
Из т.d на плане скоростей строим прямую ┴ звену DE, а из т.р проводим вертикальную прямую. В пересечении получим т.е. Соединяем т.а и т.b. Это будет вектор скорости т.В (VB).
VЕ = pе*![]() = 0.04*34,7 = 1,388
= 0.04*34,7 = 1,388 ![]()
Аналогично строятся планы мгновенных скоростей для 2, 3, 4, 5, 7, 8, 10, 11 положений механизма.
Похожие работы
... напряжений; 4) определить размеры детали и округлить их до ближайших стандартных, согласно которым будет производится подбор сечений. 2.1 Выбор расчетной схемы В результате динамического анализа плоского рычажного механизма были определены внешние силы, которые действуют на каждое звено и кинематическую пару. Проектный расчет на прочность будем производить для группы Ассура 2-4 данного ...
... Найденные при силовом анализе механизма величины представлены в таблице 1.4. 57 48 65 0.22 0.6 0.8 0.79 0.7 0.9 73 1.9 Таблица 1.4. Силовой анализ механизма 2. ПРОЕКТНЫЙ РАСЧЕТ МЕХАНИЗМА НА ПРОЧНОСТЬ В результате динамического анализа плоского рычажного механизма были определены внешние силы, действующие на каждое ...
... длину вектора и переведем ее обратно: = 79 мм = 2370 Н 2. ПРОЕКТНЫЙ РАСЧЕТ ЗВЕНЬЕВ МЕХАНИЗМА НА ПРОЧНОСТЬ 2.1 Выбор расчетной схемы В результате динамического анализа плоского рычажного механизма были определены внешние силы, которые действуют на каждое звено и кинематическую пару. Такими внешними силами являются силы инерции , моменты инерции и реакции в кинематических парах R. Под ...
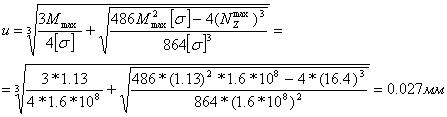
... 74 R05 24.4 0,005 G4 14,7 Fi4 7.02 R04 7.6 G5 24,5 Fi5 8.125 Fур 0,197 2 ПРОЕКТНЫЙ РАСЧЕТ МЕХАНИЗМА НА ПРОЧНОСТЬ В результате динамического анализа плоского рычажного механизма были определены внешние силы, действующие на каждое звено и кинематическую пару. Этими ...
0 комментариев