Навигация
Построение планов мгновенных ускорений
29262
знака
0
таблиц
2
изображения
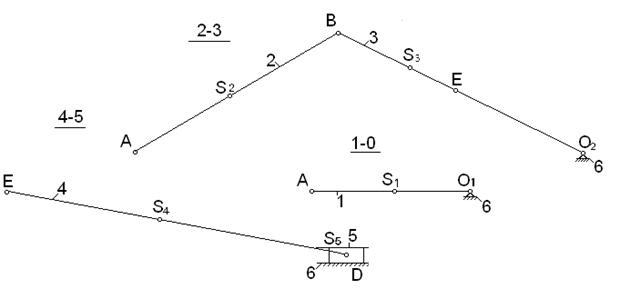
1.3 Построение планов мгновенных ускорений.
Ускорения точек О и О1 равны нулю, поэтому на плане ускорений они совпадут с полюсом плана ускорений π.
Положение 0:
Ускорение точки А находим:
На плане мгновенных ускорений строим отрезок πа ║ ОА, его длина (πа)=70 мм. Тогда масштабный коэффициент:
Ускорение точки В можно найти с помощью решения векторного уравнения:
![]()
Направление ускорения т.В и т.А ║ прямой Х-Х, ![]() ┴ ВА, следовательно ускорение т.В совпадёт с концом вектора мгновенного ускорения т.А, а это значит, что и ускорения всех остальных точек механизма совпадут с ним.
┴ ВА, следовательно ускорение т.В совпадёт с концом вектора мгновенного ускорения т.А, а это значит, что и ускорения всех остальных точек механизма совпадут с ним.
Положение 7:
Ускорение точки А находим:
На плане мгновенных ускорений строим отрезок πа ║ ОА, его длина (πа)=70 мм.
Ускорение точки В можно найти с помощью решения векторного уравнения:
![]()

От т.а откладываем отрезок равный 21 мм ║ АВ, затем от конца полученного вектора строим отрезок ┴ АВ, а через полюс проводим горизонтальную прямую. Соединяя тоску пересечения с полюсом, получим вектор ускорения т.В.
Ускорение т.C находим с помощью теоремы подобия и правила чтения букв:
 , следовательно
, следовательно 
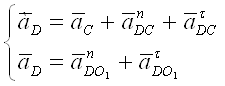
Ускорение точки D можно найти с помощью решения системы векторных уравнений:

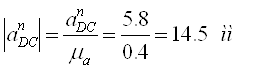
От т.с откладываем отрезок равный 14,5 мм ║ DC, затем от конца полученного вектора строим отрезок ┴ DС.

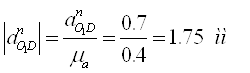
Из т. π строим отрезок равный 1,75 мм ║ O1D, затем через конец полученного вектора проводим прямую ┴ O1D. Соединяя точку пересечения прямой ┴ O1D и прямой ┴ DС с полюсом, получим вектор ускорения т.D.
Ускорение точки E можно найти с помощью решения системы векторных уравнений:
![]()

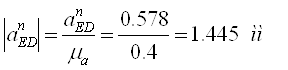
Направление ускорения точки E ║ ED, поэтому через полюс проводим горизонтальную прямую, а от т.конца вектора ускорения т.D строим отрезок равный 1,4 мм ║ ED, затем от конца полученного ве6ктора проводим прямую ┴ ЕD. Соединяя точку пересечения прямой ║ ED и прямой ┴ ЕD с полюсом, получаем вектор ускорения точки Е.
1.4 Построение диаграммы перемещений выходного звена.
Диаграмма перемещений выходного звена получается в результате построения отрезков, которые берутся с чертежа плоского рычажного механизма в 12 положениях с учётом масштабного коэффициента
1.5 Построение диаграммы скоростей выходного звена.
Диаграмма скоростей выходного звена получается в результате графического дифференцирования методом приращений диаграммы перемещений выходного звена. Этот метод по сути является методом хорд. Если постоянное полюсное расстояние Н взять равным величине интервала Δt, тогда нет необходимости в проведении лучей через полюс П, так как в этом случае отрезки hi являются приращениями функции S(t) на интервале Δt.
Т. е. на диаграмме перемещений строится вертикальный отрезок от первого деления до пересечения с графиком. Затем из точки пересечения откладывается горизонтальный отрезок до пересечения со следующим делением. Потом от полученной точки снова откладывается вертикальный отрезок до пересечения с графиком. Так повторяется до окончания графика. Полученные отрезки строят на диаграмме скоростей с учётом масштабного коэффициента, но не от первого деления, а на пол деления раньше:

1.6 Построение диаграммы ускорений выходного звена.
Строится аналогично диаграмме скоростей выходного звена механизма

2. Силовой анализ плоского рычажного механизма.
Дано:
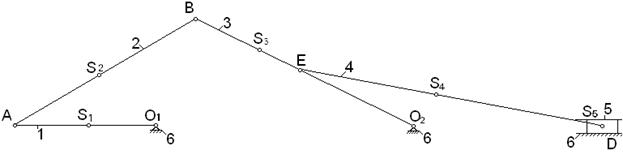
lОА = 125 мм;
lАВ = 325 мм;
lАС = 150 мм;
lCD= 220 мм;
lО1D= 150 мм;
lDE= 200 мм;
ω = 15 с-1;
Fmax= 6.3 кН;
δ = 0,07;
mК = 25 кг/м;
mВ = 20 кг;
mЕ = 15 кг;
Диаграмма сил полезных сопротивлений.
Необходимо определить реакции в кинематических парах и уравновешивающий момент на входном валу механизма.
Похожие работы
... напряжений; 4) определить размеры детали и округлить их до ближайших стандартных, согласно которым будет производится подбор сечений. 2.1 Выбор расчетной схемы В результате динамического анализа плоского рычажного механизма были определены внешние силы, которые действуют на каждое звено и кинематическую пару. Проектный расчет на прочность будем производить для группы Ассура 2-4 данного ...
... Найденные при силовом анализе механизма величины представлены в таблице 1.4. 57 48 65 0.22 0.6 0.8 0.79 0.7 0.9 73 1.9 Таблица 1.4. Силовой анализ механизма 2. ПРОЕКТНЫЙ РАСЧЕТ МЕХАНИЗМА НА ПРОЧНОСТЬ В результате динамического анализа плоского рычажного механизма были определены внешние силы, действующие на каждое ...
... длину вектора и переведем ее обратно: = 79 мм = 2370 Н 2. ПРОЕКТНЫЙ РАСЧЕТ ЗВЕНЬЕВ МЕХАНИЗМА НА ПРОЧНОСТЬ 2.1 Выбор расчетной схемы В результате динамического анализа плоского рычажного механизма были определены внешние силы, которые действуют на каждое звено и кинематическую пару. Такими внешними силами являются силы инерции , моменты инерции и реакции в кинематических парах R. Под ...
... 74 R05 24.4 0,005 G4 14,7 Fi4 7.02 R04 7.6 G5 24,5 Fi5 8.125 Fур 0,197 2 ПРОЕКТНЫЙ РАСЧЕТ МЕХАНИЗМА НА ПРОЧНОСТЬ В результате динамического анализа плоского рычажного механизма были определены внешние силы, действующие на каждое звено и кинематическую пару. Этими ...
0 комментариев