ОПИСАНИЕ РАБОЧЕЙ МАШИНЫ И ЕЕ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА
ОБОСНОВАНИЕ ВЫБОРА РОДА ТОКА И ТИПА ЭЛЕКТРОПРИВОДА
РАСЧЕТ ПРИВЕДЕННЫХ СТАТИЧЕСКИХ МОМЕНТОВ, МОМЕНТОВ ИНЕРЦИИ И КОЭФФИЦИЕНТА ЖЕСТКОСТИ СИСТЕМЫ ЭЛЕКТРОПРИВОД – РАБОЧАЯ МАШИНА
ПРЕДВОРИТЕЛЬНАЯ ПРОВЕРКА ДВИГАТЕЛЯ ПО НАГРЕВУ И ПРОИЗВОДИТЕЛЬНОСТИ
ВЫБОР ПРЕОБРАЗОВАТЕЛЯ ИЛИ СТАНЦИИ УПРАВЛЕНИЯ
Структурная схема электромеханического преобразования энергии
Структурные схемы электроприводов
Расчет параметров схем включения, обеспечивающих пуск и торможение двигателя
Переходный процесс в механической части электропривода с упругими связями
Навигация
ОПИСАНИЕ РАБОЧЕЙ МАШИНЫ И ЕЕ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА
Проект автоматизированного электропривода грузового лифта
45357
знаков
5
таблиц
24
изображения
2. ОПИСАНИЕ РАБОЧЕЙ МАШИНЫ И ЕЕ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА
2.1 Исходные данные для проектирования электропривода цепного транспортера
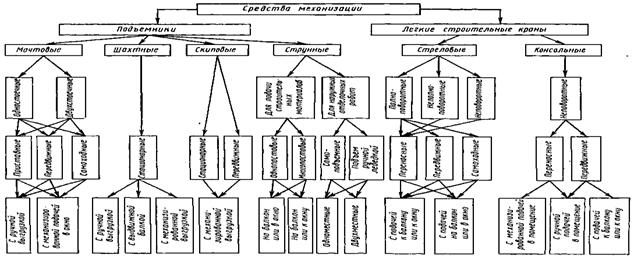
Объектом для проектирования электропривода является механизм с повторно-ратковременным режимом работы ( механизм подъема экскаватора, крана, механизм передвижения тележки или моста крана, механизм поворота экскаватора и т.п.). Нагрузка механизма изменяется в течение цикла, включает в себя разгон до рабочей скорости, выполнение работы на этой скорости, торможение или реверс и возвращение на повышенной скорости в исходное положение. В процессе работы механизма возникает необходимость регулирования скорости и момента, ограничения предельных значений момента, ограничения ускорения рабочего органа. Возникают режимы наброса и сброса нагрузки.
Исходными данными для проектирования электропривода являются:
– кинематическая схема рабочего органа с указанием вращающихся и поступательно движущихся динамических масс и усилий (моментов) сопротивления движению;
– скорости движения рабочего органа при различной загрузке с допускаемыми отклонениями от заданного значения;
– допускаемые значения ускорения рабочего органа по условиям механической прочности или условиям технологического процесса;
– время работы для выполнения технологической операции и число циклов в час;
– линейное перемещение (или угол поворота вала) РО;
– линейные (или предельные) жесткости соединительных валов РО;
– система электроснабжения участка (цеха), в котором работает механизм;
– условия окружающей среды (задымленность, вентиляция, влага и т.п.).
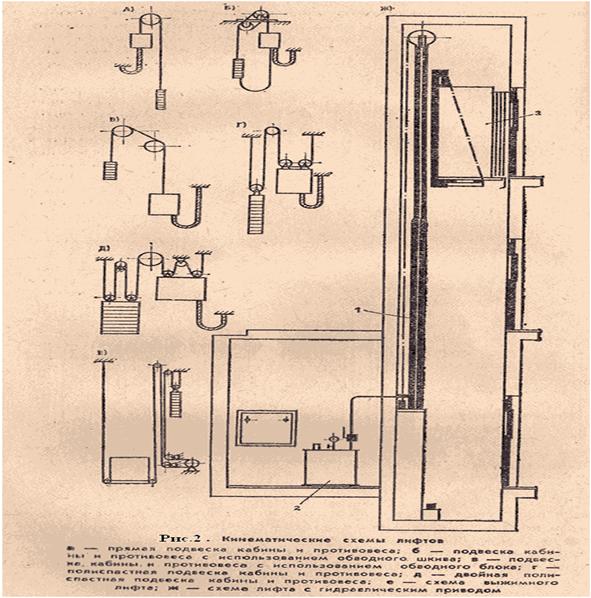
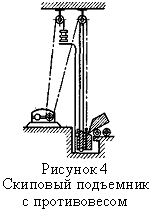
Грузовой лифт предназначен для подъёма груза с нижней площадки на верхнюю. Вниз клеть может спускаться как без груза, так и с грузом. Цикл работы лифта включает в себя времена подъёма и опускания клети, а также времена загрузки и выгрузки. Подъём клети происходит с установившейся скоростью Vр, а опускание – со скоростью Vв > Vр.
В процессе расчета необходимо определить наиболее загруженный для двигателя режим работы, обеспечить выполнение требований по ускорению лифта и возможность его работы с разными грузами на подъем и на спуск.
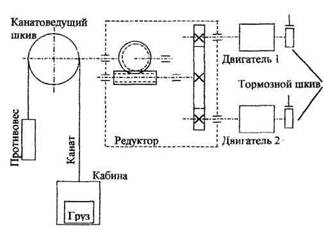
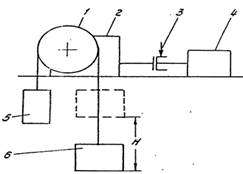
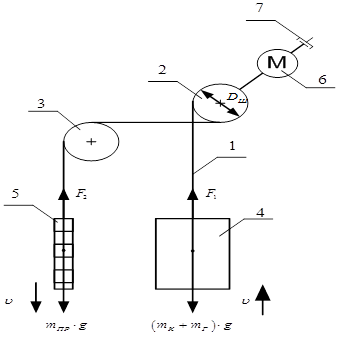
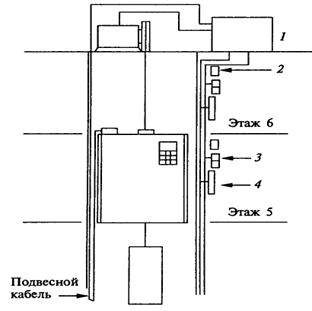
Кинематическая схема электропривода приведена на рисунке 1.
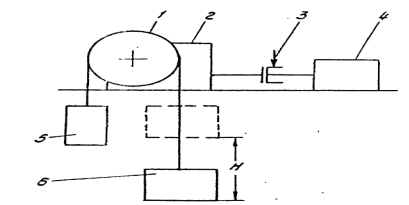
Рисунок 1 - Кинематическая схема электропривода грузового лифта:1 – канатоведущий шкив; 2 –редуктор; 3 – тормозной шкив; 4 – двигатель; 5 – клеть; 6 – противовес.
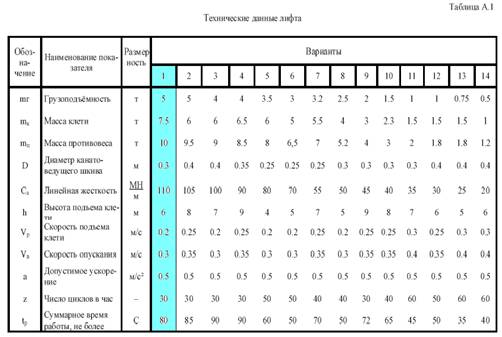
Технические данные транспортера (вариант 31) приведена таблице 1.
Таблица 1
| Параметр | Обозначение | Значение |
| Грузоподъемность, кг | mг | 5 |
| Масса клети, кг | mк | 6 |
| Масса противовеса, кг | mп | 9,5 |
| Диаметр канатоведущего шкива, м | D | 0,4 |
| Линейная жесткость, МН/м | Сл | 105 |
| Высота подъема клети, м | h | 8 |
| Скорость подъема клети, м/с | Vр | 0,25 |
| Скорость опускания, м/с | Vв | 0,35 |
| Допустимое ускорение, м/с² | а | 0,5 |
| Число циклов в час | z | 30 |
| Суммарное время работы, не более, с | tр | 85 |
3. РАСЧЕТ МОМЕНТОВ СТАТИЧЕСКИХ СОПРОТИВЛЕНИЙ И ПРЕДВАРИТЕЛЬНЫЙ РАСЧЕТ МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ
Расчет моментов при движении с грузом:
Масса всех движущихся частей: ![]()
Равновесная масса: ![]()
– момент сил трения в подшипниках

– момент трения качения
![]()
Статический момент рабочей машины равен:
![]()
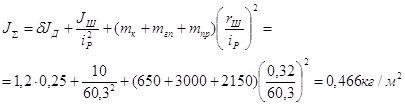
Для определения динамических моментов рабочей машины рассчитываются моменты инерции рабочей машины (рабочего органа):

При заданной величине допустимого ускорения a для каждого режима рабочей машины определяются динамические моменты
![]()
Полный момент рабочей машины
- при пуске:
![]()
- при работе с установившейся скоростью:
![]()
- при торможении:
![]()
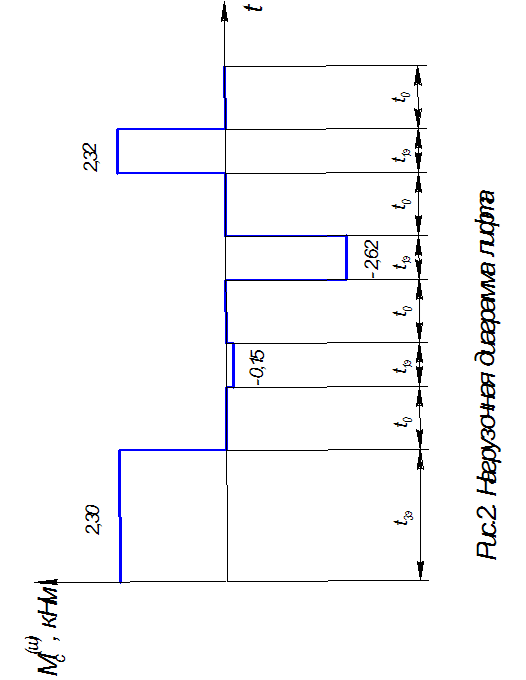
Нагрузочная диаграмма моментов рабочей машины представлена на рисунке 2.
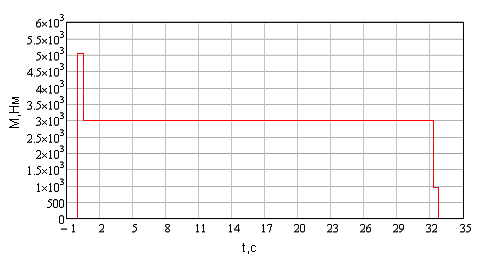
Рисунок 2 - Нагрузочная диаграмма моментов рабочей машины при движении с грузом
Расчет моментов при движении без груза:
Масса всех движущихся частей:
![]()
– момент сил трения в подшипниках

Статический момент рабочей машины равен:
![]()
Для определения динамических моментов рабочей машины рассчитываются моменты инерции рабочей машины (рабочего органа):

При заданной величине допустимого ускорения a для каждого режима рабочей машины определяются динамические моменты
![]()
Полный момент рабочей машины
- при пуске
![]()
- при работе с установившейся скоростью:
![]()
- при торможении:
![]()
Нагрузочная диаграмма моментов рабочей машины представлена на рисунке 2.
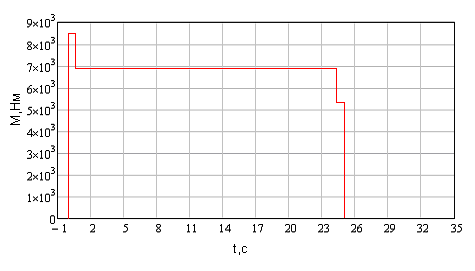
Рисунок 3 - Нагрузочная диаграмма моментов рабочей машины при движении без груза
На базе исходных данных рабочей машины рассчитывают и строят зависимости скорости рабочей машины от времени v(t). Участки различаются значениями статических нагрузок и моментов инерции. На основе заданных путей перемещения α, уcтановившейся скорости vy и допустимого ускорения a рассчитываем:
– время пуска tп до установившейся скорости с допустимым ускорением, торможения tт от установившейся скорости до остановки

При рабочем ходе:
При транспортировке:
![]()
– путь, проходимый за время пуска (торможения) рабочей машиной,
При рабочем ходе:
При транспортировке:
– время установившегося режима движения со скоростью v
При рабочем ходе:
При транспортировке:
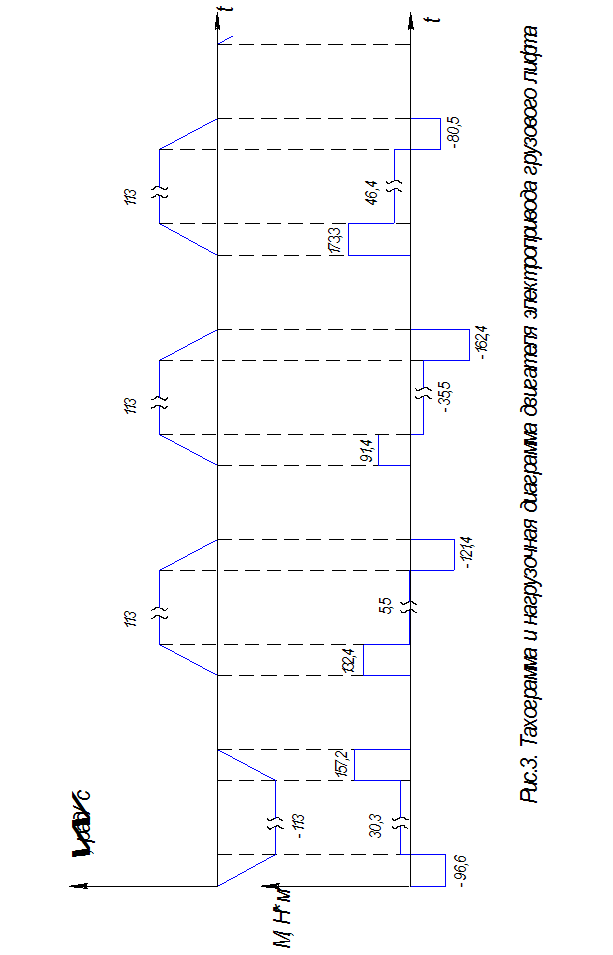
Нагрузочная диаграмма скорости рабочей машины приведена на рисунке 4.
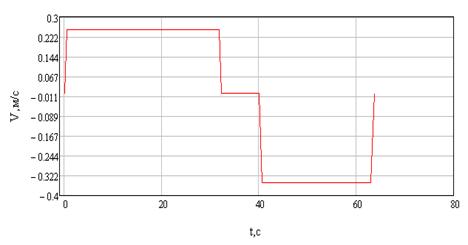
Рисунок 4 - Нагрузочная диаграмма скорости рабочей машины
На основании построенной нагрузочной диаграммы момента рабочей машины можно рассчитать среднеквадратичное значение момента:
в котором учтены не только статические нагрузки, но и часть динамических нагрузок.
Фактическое значение относительной продолжительности включения ПВф
рассчитывается по длительности времени работы tk на всех m участках движения и заданному времени цикла
tц = 3600 / z = 51.429(с)
где z – число циклов работы машины в час:
ПВкат=40%
При этом мощность двигателя может быть определена по соотношению

Похожие работы
... числа редуктора Расчет передаточного числа редуктора выполняется так, чтобы максимальной скорости рабочего органа механизма соответствовала номинальная скорость двигателя. Для привода грузового лифта: Расчет и построение нагрузочной диаграммы двигателя Для проверки предварительно выбранного двигателя по нагреву выполним построение упрощенной нагрузочной диаграммы двигателя (т.е. ...
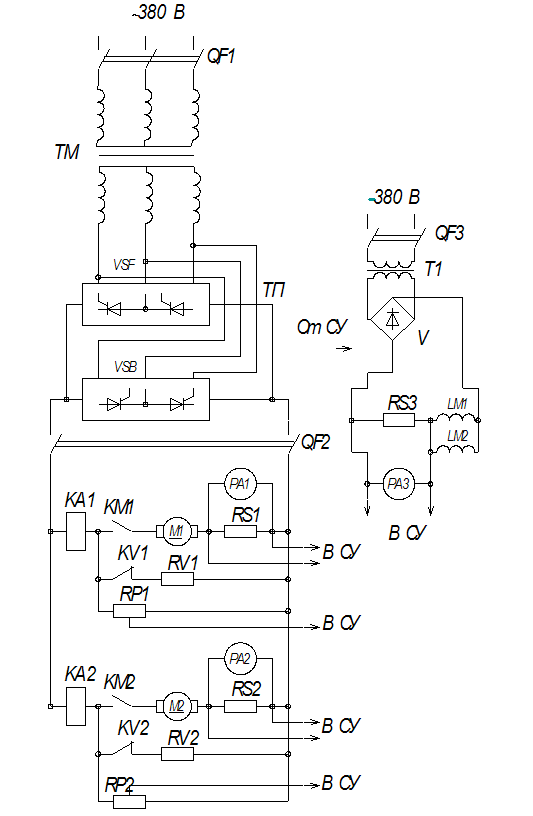
... более 60 В постоянного тока. Положение этих выключателей должно быть обозначено соответствующими символами или надписями: «Вкл.»; «Откл.». 3. Выбор рода тока и типа электропривода Электропривод лифта должен удовлетворять следующим требованиям: а) замыкание токоведущих частей электрического устройства привода тормоза (электромагнита и т.п.) на корпус не должно вызывать самопроизвольное ...
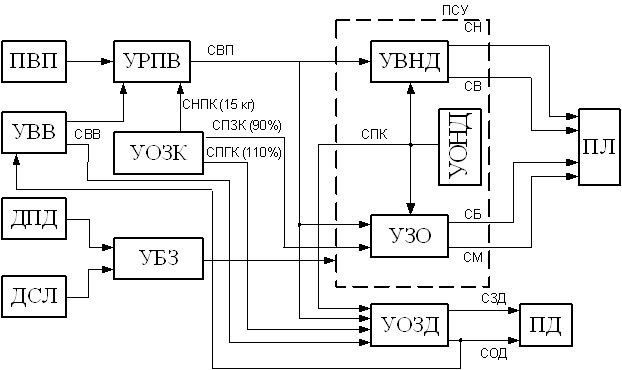
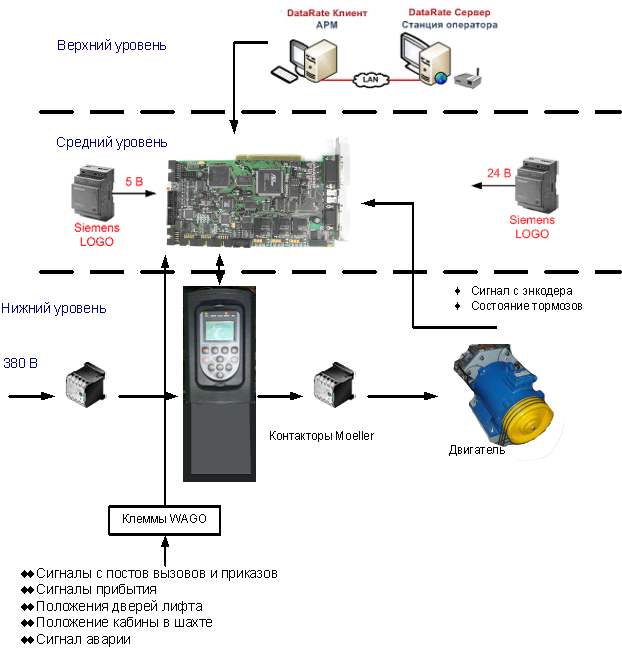
... кабины. Рисунок 4 – Функциональная структура управления 2.3 Определение уровней управления ТП и архитектуры верхнего уровня АСУ Для управления технологическим процессом передвижения пассажирского лифта необходимо наличие трёх уровней управления. Верхний уровень В последнее время наблюдается тенденция к оснащению зданий сложным инженерным и коммуникационным оборудованием. Появляется ...
... и дешевыми для больных сахарным диабетом по сравнению с другими видами мармеладов, особенно импортными [ ]. 5 Мероприятия, направленные на увеличение сроков годности кондитерских изделий В соответствии с ГОСТ Р 51074-97 сроки хранения конфет и мармеладных изделий следующие: Конфеты: Глазированные шоколадной глазурью: - с корпусами из масс пралине, из сбивных масс завернутые 3 мес; - с ...
0 комментариев