Выбор рациональной схемы электропривода с учетом дополнительных требований
Выбор типа и параметров передаточного устройства и приведение механических величин к валу электропривода
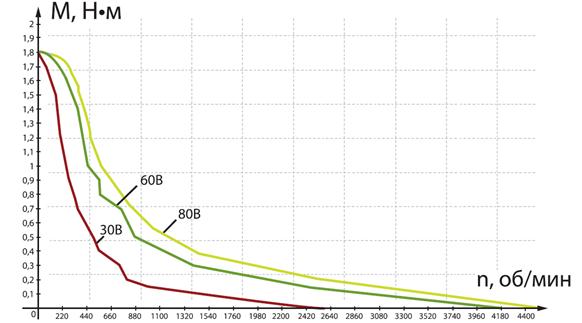
Предварительный выбор электродвигателя
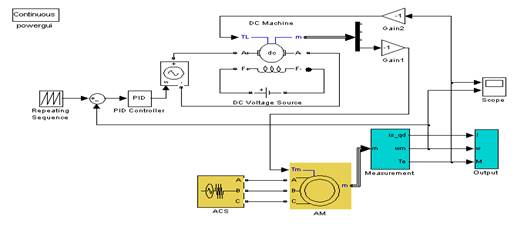
Выбор схемы главной электрической цепи привода, тип управляемого преобразователя, расчёт параметров элементов схемы
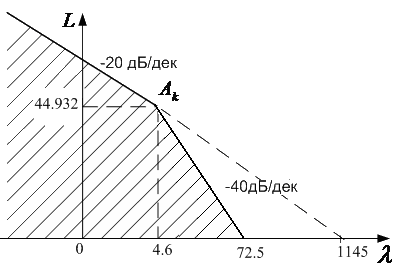
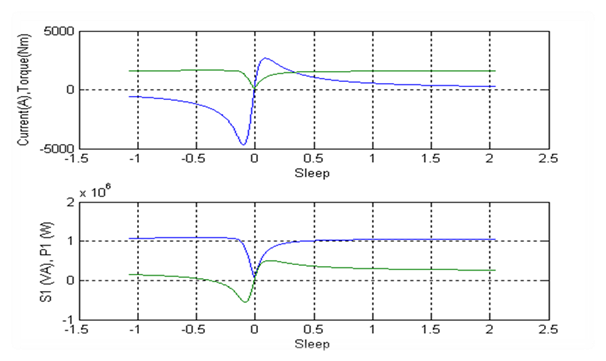
Расчёт и построение механических характеристик электропривода, соответствующих установившимся режимам рабочего цикла
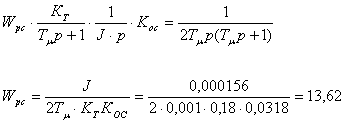
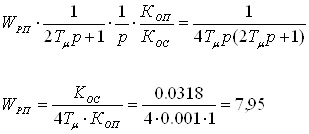
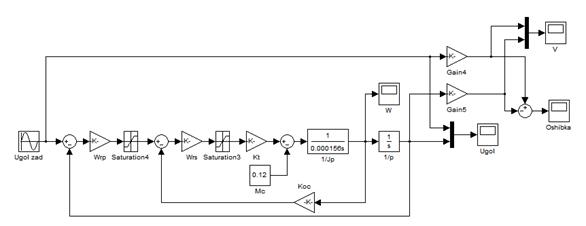
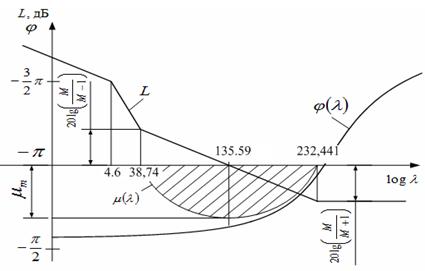
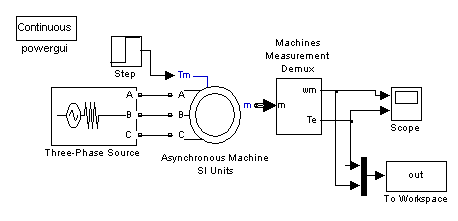
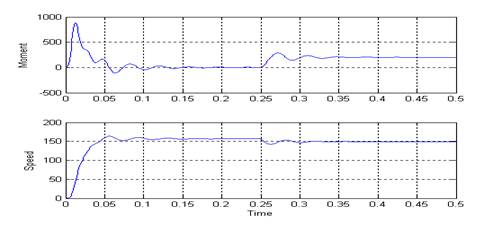
Выбор способа формирования и произведение расчета переходных процессов в электроприводе
Навигация
Разработка регулируемого электропривода механизма с заданным рабочим циклом
Разработка регулируемого электропривода механизма с заданным рабочим циклом
13745
знаков
70
таблиц
16
изображений
Разработка регулируемого электропривода механизма с заданным рабочим циклом
Исходные данные
- сеть ![]() ,
, ![]() ;
;
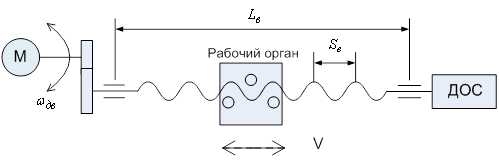
- тип исполнительного органа – привод подачи станка;
- масса – ![]() ;
;
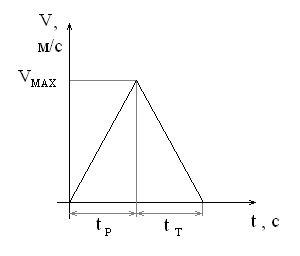
- параметры рабочего цикла, отнесенные к рабочему органу:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Введение
Среди большого разнообразия производственных электрифицированных агрегатов механизмы циклического действия относятся к числу основных в современных системах автоматического управления технологическими процессами. Отличительной особенность названных механизмов является режим работы, состоящий из ряда повторяющихся циклов. Каждый рабочий цикл включает, кроме участков установившейся работы или паузы, участки пуска, торможения и реверса. К этой группе относятся также и позиционные механизмы, рабочий орган которых должен в определённые моменты времени занимать строго определённые положения.
Требования к электроприводу названных механизмов продиктованы напряжённым пуско-тормозным режимом работы с большим числом включений в час, необходимостью регулирования скорости в широком диапазоне, надёжностью и экономичностью. В большой степени это относится к металлургическому производству, так как обработка металла связана с выполнением многочисленных циклических операций. Эти механизмы часто играют первостепенную роль в повышении производительности труда и эффективности производства, что подтверждает большую значимость рассматриваемых систем электропривода. Кроме того, общая мощность двигателей механизмов циклического действия составляет значительную часть мощности всех установленных двигателей.
Похожие работы
... , пройденный столом на интервале 11: Продолжительность интервала 11: Момент двигателя на интервале 5: Рисунок 4 Тахограмма и нагрузочная диаграмма электропривода механизма перемещения стола продольно-строгального станка. Нагрузочная диаграмма и тахограмма двигателя представлены на рисунке 4: 3.4 Проверка двигателя по нагреву Для проверки двигателя по ...
... необходимо рассмотреть сам манипулятор, и привести необходимые параметры к валу двигателя. Манипуляторы – технические устройства для воспроизведения некоторых двигательных функций рук человека. Для механизма выдвижения руки манипулятора выбираем шарико-винтовую передачу. Даная передача обеспечивает достаточно высокий коэффициент полезного действия(до 0,9), имеет большой ресурс и малые габариты. ...
... ТРЕБОВАНИЙ И ПОСТАНОВКА ЗАДАЧ ПРОЕКТИРОВАНИЯ 1.1 Расчеты основных параметров электромеханической системы привода В данном курсовом проекте разрабатывается привод подач токарного станка. Для перемещения по координате предусмотрен свой привод. Поэтому разработку производим для одного контура управления. Применение ЦСУ позволяет значительно повысить точность и качество обработки, упростить ...
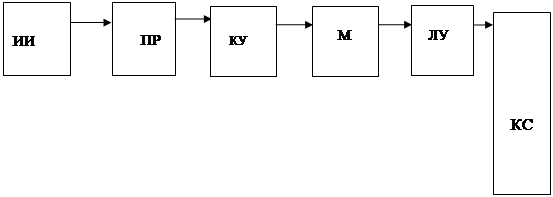
... при механических, климатических и специальных воздействиях окружающей среды; - специальные требования по защите информации. Построение «автоматизированной системы информационной поддержки наладочных работ электропривода» Дано: 1 Объект информатизации 2 Ограничения 3 Критерий 4 База данных 5 Классификатор характеристик 6 Пакет программ ...
0 комментариев