Выбор рациональной схемы электропривода с учетом дополнительных требований
Выбор типа и параметров передаточного устройства и приведение механических величин к валу электропривода
Предварительный выбор электродвигателя
Выбор схемы главной электрической цепи привода, тип управляемого преобразователя, расчёт параметров элементов схемы
Расчёт и построение механических характеристик электропривода, соответствующих установившимся режимам рабочего цикла
Выбор способа формирования и произведение расчета переходных процессов в электроприводе
Навигация
Выбор типа и параметров передаточного устройства и приведение механических величин к валу электропривода
Разработка регулируемого электропривода механизма с заданным рабочим циклом
13745
знаков
70
таблиц
16
изображений
2. Выбор типа и параметров передаточного устройства и приведение механических величин к валу электропривода
Передаточное устройство привода преобразует вращательное движение электродвигателя в поступательное движение исполнительного органа. В современных электроприводах существует тенденция упрощения передаточного устройства путем исключения промежуточных звеньев в виде редукторов или других механизмов. При этом заметно возрастает точность, быстродействие и надежность привода.
Для электропривода подачи станка выбираем передачу винт-гайка качения. Преимуществами передач винт-гайка качения является: 1) возможность полного устранения зазора в резьбе и создания натяга, обеспечивающего высокую осевую жесткость, 2) низкие потери на трение; к. п. д. этих передач достигает 0.95, 3) почти полная независимость силы трения от скорости и очень малое трение покоя, что обеспечивает равномерность движения.
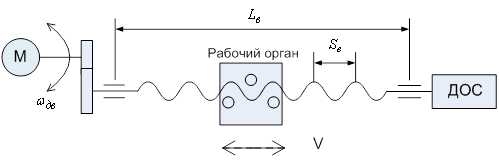
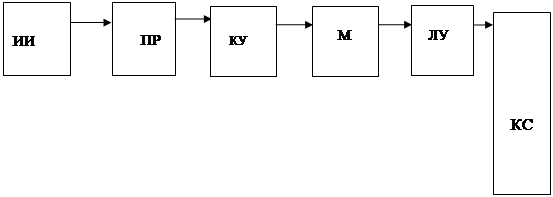
Кинематическая схема электропривода приведена на рис. 1.
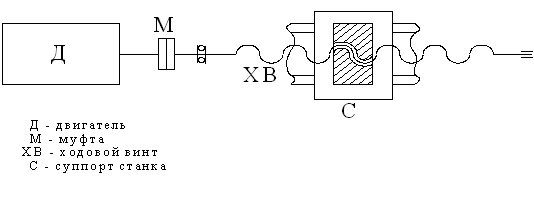
Рис. 1. Кинематическая схема электропривода
Основным параметром при расчёте передачи винт-гайка качения является рабочая часть ходового винта:
| (3) |
По табл. 10 определяем параметры винта, при условии ![]() :
:
|
| |
|
|
Шаг винта определяем из стандартного ряда, учитывая рекомендации:
|
|
Исходя из параметров винта по табл. 7 определяем параметры передачи винт-гайка качения с натягом:
|
| |
|
| |
|
| |
|
|
К.П.Д. передачи по:
|
|
Радиус приведения к валу двигателя по:
|
| (4) |
Скорость вращения вала двигателя по:
|
| (5) |
|
| (6) |
Приведение скорости рабочего органа к валу двигателя сведено в табл. 3.
Таблица 3. Скорость рабочего органа и вала двигателя в момент ![]() -ого цикла
-ого цикла
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Момент приведённый к валу двигателя по:
|
| (7) |
Статический момент на валу двигателя:
|
| (8) |
Момент трения складывается из:
|
| (9) |
Коэффициент трения в направляющих качения с танкетками примем по:
|
|
Сила трения в направляющих:
|
| (10) |
Момент сопротивления на валу двигателя от силы трения в направляющих:
|
| (11) |
Момент трения в шариковой паре при наличии предварительного натяга:
|
| (12) |
Количество подшипников ходового винта:
|
|
Внутренний диаметр подшипников табл. 12 [1, стр. 40];
|
|
Момент от сил трения в подшипниковой паре при наличии предварительного натяга [4, стр. 457];
|
| (13) |
Приведение статического момента к валу двигателя сведено в табл. 4.
Таблица 4. Статический момент и сила резания в момент ![]() -ого цикла
-ого цикла
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Момент инерции рабочего органа, приведенный к валу двигателя:
|
| (14) |
Момент инерции ходового винта, приведенный к валу двигателя:
|
| (15) |
Похожие работы
... , пройденный столом на интервале 11: Продолжительность интервала 11: Момент двигателя на интервале 5: Рисунок 4 Тахограмма и нагрузочная диаграмма электропривода механизма перемещения стола продольно-строгального станка. Нагрузочная диаграмма и тахограмма двигателя представлены на рисунке 4: 3.4 Проверка двигателя по нагреву Для проверки двигателя по ...
... необходимо рассмотреть сам манипулятор, и привести необходимые параметры к валу двигателя. Манипуляторы – технические устройства для воспроизведения некоторых двигательных функций рук человека. Для механизма выдвижения руки манипулятора выбираем шарико-винтовую передачу. Даная передача обеспечивает достаточно высокий коэффициент полезного действия(до 0,9), имеет большой ресурс и малые габариты. ...
... ТРЕБОВАНИЙ И ПОСТАНОВКА ЗАДАЧ ПРОЕКТИРОВАНИЯ 1.1 Расчеты основных параметров электромеханической системы привода В данном курсовом проекте разрабатывается привод подач токарного станка. Для перемещения по координате предусмотрен свой привод. Поэтому разработку производим для одного контура управления. Применение ЦСУ позволяет значительно повысить точность и качество обработки, упростить ...
... при механических, климатических и специальных воздействиях окружающей среды; - специальные требования по защите информации. Построение «автоматизированной системы информационной поддержки наладочных работ электропривода» Дано: 1 Объект информатизации 2 Ограничения 3 Критерий 4 База данных 5 Классификатор характеристик 6 Пакет программ ...
0 комментариев