Выбор рациональной схемы электропривода с учетом дополнительных требований
Выбор типа и параметров передаточного устройства и приведение механических величин к валу электропривода
Предварительный выбор электродвигателя
Выбор схемы главной электрической цепи привода, тип управляемого преобразователя, расчёт параметров элементов схемы
Расчёт и построение механических характеристик электропривода, соответствующих установившимся режимам рабочего цикла
Выбор способа формирования и произведение расчета переходных процессов в электроприводе
Навигация
Выбор рациональной схемы электропривода с учетом дополнительных требований
Разработка регулируемого электропривода механизма с заданным рабочим циклом
13745
знаков
70
таблиц
16
изображений
1. Выбор рациональной схемы электропривода с учетом дополнительных требований
Автоматизированные электроприводы, и в особенности электроприводы с полупроводниковыми преобразователями, получают в последние годы всё большее практическое применение. Технические средства, используемые при создании автоматизированных электроприводов с полупроводниковыми преобразователями, непрерывно совершенствуются, а технико-экономические требования к таким электроприводам, всё более повышаются. Одним из наиболее перспективных направлений в создании высококачественных и надёжных автоматизированных электроприводов явилось в последние годы широкое применение в них микропроцессоров, микро-ЭВМ, элементов и устройств цифровой техники.
Указанному перспективному направлению в развитии автоматизированного электропривода в значительной мере отвечают цифровые электроприводы с силовыми транзисторными ключами (например, на IGBT-транзисторах). Как известно, подобные электроприводы отличаются весьма существенными достоинствами, в частности высокими энергетическими показателями – КПД и коэффициентом мощности, малыми габаритами и массой, стабильностью характеристик и их слабой зависимость от параметров силовых транзисторов, работающих в ключевом режиме, высоким быстродействием, возможность оптимизации параметров электроприводов с помощью микропроцессоров и микро-ЭВМ.
Выбор системы электропривода возможен на основе сравнительного анализа технических данных, приведенных в табл. 1, и исходных данных на проектирование электропривода с учетом изложенных выше особенностей применения наиболее распространенных систем электропривода постоянного тока.
Таблица 1. Технические показатели систем электропривода
| Наименование показателей |
|
|
|
|
|
|
| Источник питания | ~ | ~/= | ~/= | ~ | ~ | ~ |
| Регулирование скорости |
|
|
|
|
|
|
| Диапазон мощностей |
|
|
|
|
|
|
* – в зоне частотного регулирования 5…20 Гц,
** – для «вентиляторной» нагрузки.
Диапазон регулирования скорости:
|
| (1) |
Необходимая средняя полезная мощность двигателя:
|
| (2) |

Исходя из этих условий выбираем систему ![]() . Основные технико-экономические свойства этой системы приведены в табл. 2.
. Основные технико-экономические свойства этой системы приведены в табл. 2.
Таблица 2. Удельная стоимость электрооборудования, усл. ед./кВт
| Наименование |
|
|
|
|
|
|
|
|
|
|
|
|
|
Похожие работы
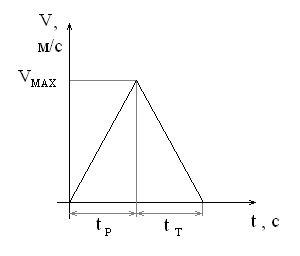
... , пройденный столом на интервале 11: Продолжительность интервала 11: Момент двигателя на интервале 5: Рисунок 4 Тахограмма и нагрузочная диаграмма электропривода механизма перемещения стола продольно-строгального станка. Нагрузочная диаграмма и тахограмма двигателя представлены на рисунке 4: 3.4 Проверка двигателя по нагреву Для проверки двигателя по ...
... необходимо рассмотреть сам манипулятор, и привести необходимые параметры к валу двигателя. Манипуляторы – технические устройства для воспроизведения некоторых двигательных функций рук человека. Для механизма выдвижения руки манипулятора выбираем шарико-винтовую передачу. Даная передача обеспечивает достаточно высокий коэффициент полезного действия(до 0,9), имеет большой ресурс и малые габариты. ...
... ТРЕБОВАНИЙ И ПОСТАНОВКА ЗАДАЧ ПРОЕКТИРОВАНИЯ 1.1 Расчеты основных параметров электромеханической системы привода В данном курсовом проекте разрабатывается привод подач токарного станка. Для перемещения по координате предусмотрен свой привод. Поэтому разработку производим для одного контура управления. Применение ЦСУ позволяет значительно повысить точность и качество обработки, упростить ...
... при механических, климатических и специальных воздействиях окружающей среды; - специальные требования по защите информации. Построение «автоматизированной системы информационной поддержки наладочных работ электропривода» Дано: 1 Объект информатизации 2 Ограничения 3 Критерий 4 База данных 5 Классификатор характеристик 6 Пакет программ ...
0 комментариев