Навигация
Тиристорный преобразователь
19399
знаков
3
таблицы
7
изображений
1.1.4 Тиристорный преобразователь
Тиристорный преобразователь состоит из системы импульсно-фазового управления (СИФУ) и собственно тиристорного преобразователя, основным элементом которого является силовая схема преобразования энергии переменного тока в энергию постоянного тока (управляемый выпрямитель) с помощью тиристоров.
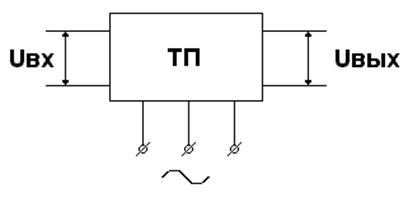
В качестве нагрузки преобразователя принята якорная цепь двигателя постоянного тока. СИФУ осуществляет преобразование непрерывного сигнала управления Uу(t), поступающего на его вход, в последовательность отпирающих импульсов ai(t) (формируемых генератором импульсов), сдвинутых по фазе относительно момента естественного отпирания тиристоров. Затем с помощью собственно тиристорного преобразователя производится обратное преобразование дискретных значений ai(t) в кусочно-непрерывный сигнал выходной координаты – ЭДС преобразователя.
1.1.5 Редуктор
Представляет собой сугубо механическую конструкцию, предназначенную для передачи вращающего момента, уменьшения (увеличения) частоты вращения вала.
Состоит из зубчатой передачи любого типа (выбирается в зависимости от конкретных нужд и прикладываемых сил). Могут быть одно — и несколько - ступенчатыми, различными по форме, назначению, методам охлаждения и т.п.
Принцип действия САУ
Рассмотрим работу следящего привода. При идентичном положении командной и исполнительной осей привода угол рассогласования между ними равен нулю. Также равны нулю напряжения Ue и Uд , т. е. двигатель и вся система находятся в покое. Повернем теперь командную ось на некоторый угол. В результате этого возникнут угол рассогласования e = a - b и пропорциональные ему напряжения Uд двигатель вращаться и через редуктор будет поворачивать исполнительную ось и движок потенциометра Пвых в сторону уменьшения угла рассогласования до тех пор, пока этот угол не станет равным нулю. При повороте командной оси в другую сторону меняется полярность напряжения, прикладываемого к двигателю, и, следовательно, направления его вращения. Если угловое напряжение a(t) командной оси изменяется во времени по произвольному закону, то и угловое положение b(t) исполнительной оси также будет изменятся по тому же закону.
Следует отметить, что направление вращения двигателя будет совпадать со знаком угла рассогласования только в том случаи, когда обратная связь от двигателя к исполнительной оси (движку потенциометра Пвых) будет отрицательной. Если же при вращении двигателя угол рассогласования возрастёт, то это означает, что обратная связь положительна. Для того чтобы сделать её отрицательной, необходимо поменять полярность напряжения, прикладываемого к двигателю.
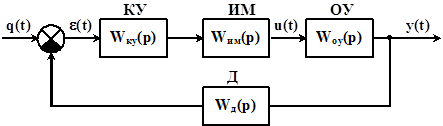
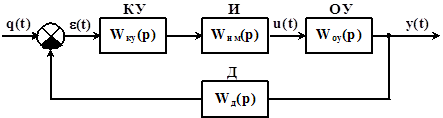
Функциональная схема САУ приведена ниже по тексту (см. рис. 2).

Рис.2 Функциональная схема САУ
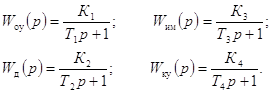
2. Дифференциальные управления и передаточные функции элементов, образующих САУ
2.1 Потенциометр
Потенциометрическое устройство описывается уравнением:
Uq(t) = kпот × q (t),
где kпот=70 в/рад.
Уравнение потенциометра в операционной форме:
Uq(S) = kпот × q (S).
Откуда передаточная функция потенциометра:
Wпот(S) =  = kпот.
= kпот.
Следовательно, потенциометрическое устройство представлено пропорциональным звеном и описываются уравнением:
Uq(S) = 70×q (S).
2.2 Тиристорный преобразователь
Тиристорный преобразователь в режиме непрерывного тока описывается звеном, состоящим из последовательного соединения линейного безинерционного звена с коэффициентом усиления kтп и звена чистого запаздывания, то есть
![]() ,
,
где t – случайное время, обычно называемое среднестатистическим запаздыванием.
Обычно функция ![]() раскладывается в степенной ряд и учитываются только два первых члена этого ряда. Тогда передаточная функция тиристорного преобразователя принимает вид:
раскладывается в степенной ряд и учитываются только два первых члена этого ряда. Тогда передаточная функция тиристорного преобразователя принимает вид:
![]() .
.
Учитывая, что Ттп = t получаем
![]() ,
,
где Ттп = 3.33×10-3![]() с, kтп = 20.
с, kтп = 20.
Для данной передаточной функции дифферинциальное уравнение:
![]()
2.3 Электронный усилитель
Электронный усилитель описывается уравнением:
Uу(t) = kэу × Uq (t),
где kэу = 35.
Уравнение электронного усилителя в операционной форме:
Uу(S) = kэу × Uq (S).
Откуда передаточная функция электронного усилителя:
Wэу(S) =  = kэу.
= kэу.
Следовательно, электронный усилитель представлен пропорциональным звеном и описываются уравнением:
Uу(S) = 35×Uq (S).
Похожие работы



... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...
... . Таким образом, необходимость автоматизации технологических процессов очевидна и есть необходимость научиться рассчитывать параметры систем автоматического управления (САУ), для последующего применения своих знаний на практике. В курсовой работе произведен анализ динамических свойств заданной структурной схемы САУ с составлением и анализом математических моделей объектов управления. 2. Анализ ...
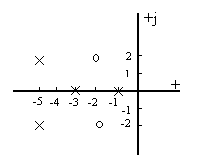
... можно судить, если в пространстве изменяемых параметров построить область устойчивости, т.е. выделить область значений параметров, при которых система сохраняет устойчивость. Область устойчивости в теории автоматического управления принято называть D – областью, а представление области параметров в виде областей устойчивости и неустойчивости называют D – разбиением. Построение области ...
... для переходной функции (22) Подставив эти выражения в формулу для h(t) и выполнив преобразования, получим связь между переходной функцией и ВЧХ: (23) Логарифмические частотные характеристики САУ Исследование систем существенно упрощается при использовании не обычных, а логарифмических частотных характеристик. При этом натуральная логарифмическая амплитудная и фазовая частотные ...
0 комментариев