Навигация
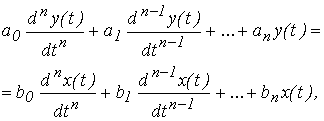
Дифференциальное уравнение и передаточная функция разомкнутой САУ
19399
знаков
3
таблицы
7
изображений
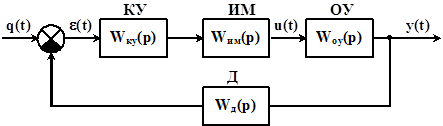
3.2 Дифференциальное уравнение и передаточная функция разомкнутой САУ
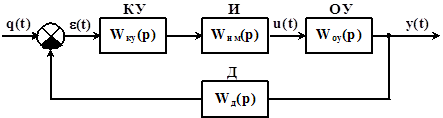
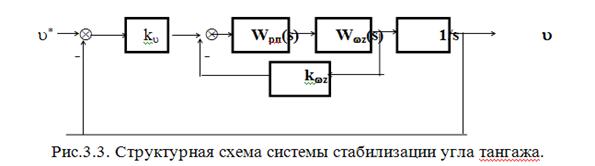
Размыкаем схему на рис.3 перед элементом сравнения (цепь обратной связи) и разворачиваем в прямую цепь. Для разомкнутой САУ входной величиной является угол рассогласования q(t), а выходной величиной - угол поворота b(t) вала рабочего механизма.
Передаточная функция разомкнутой САУ представляет собой произведение передаточных функций каждого звена:
Wр(S) = ![]() ,
,
где коэффициент усиления разомкнутой САУ kv определяется как произведение:
kv = kпот×kред×kтп×kэу×kд = 70×35×20×2,5×1/350 = 350.
Тогда передаточная функция разомкнутой САУ примет вид:
Wр(S) = ![]() .
.
Для данной передаточной функции разомкнутой САУ получим следующее дифференциальное уравнение:

3.3 Дифференциальное уравнение и передаточная функция замкнутой САУ
Замыкаем цепь обратной связи. Для замкнутой системы входной величиной является угол поворота входного вала a(t), а выходной - угол поворота b(t). В замкнутом состоянии величина q(t) представляет собой рассогласование:
q(t) = a(t) - b(t).
Передаточную функцию замкнутой САУ можно определить следующим образом:
![]()
3.4 Дифференциальное уравнение и передаточная функция ошибки. Исследование САУ на астатизм
Ошибка q(t) характеризует точность воспроизведения следящей системой входной величины. В качестве входной величины следует принять угол поворота a(t), а выходной - угол рассогласования q(t).
Уравнению ошибки соответствует передаточная функция:
![]()
Исследуем САУ на астатизм по полученной передаточной функции ошибки:
А) определяем С0:
![]() .
.
так как С0 = 0, то эта система астатическая;
Б) определяем С1:
так как ![]() , то система является астатической первого порядка.
, то система является астатической первого порядка.
4. Исследование устойчивости исходной замкнутой САУ
4.1 Исследование устойчивости САУ по критерию Гурвица
Критерием, пригодным для оценки устойчивости уравнений порядка выше третьего, является критерий немецкого математика Гурвица. Составим характеристическое уравнение исходной замкнутой САУ:
![]()
Обозначим
![]() ;
;

![]() ;
;
![]() ;
;
![]() .
.
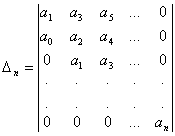
Составим определитель Гурвица по определению:
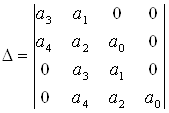 ;
;
Составим диагональные миноры:
![]() ;
;
 ;
;

Итак, получаем, что ![]() ;
; ![]() ;
; ![]() , т.е. условие устойчивости системы не выполняется, а следовательно система по критерию Гурвица неустойчива.
, т.е. условие устойчивости системы не выполняется, а следовательно система по критерию Гурвица неустойчива.
4.2 Исследование устойчивости САУ по критерию Найквиста
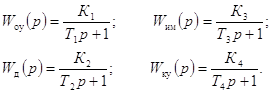
В соответствии со структурной схемой (рис.3) АЧХ и ФЧХ разомкнутой САУ можно представить в виде произведения АЧХ и суммы ФЧХ элементарных динамических звеньев:
а) интегрирующего звена:
![]() ,
,![]() ;
;
б) апериодического звена первого порядка:
![]() ,
,![]() ;
;
в) апериодического звена первого порядка:
![]() ,
,![]() ;
;
г) апериодического звена первого порядка:
![]() ,
,![]() ;
;
Задаемся определенным значением частоты и определяем АЧХ и ФЧХ для каждого звена. Результаты вычислений сведены в табл.2. Причем
A (w) = A1(w)A2(w)A3(w)A4(w);
j(w) = j1(w)+j2(w)+j3(w)+j4(w).
По данным табл.2 строим АФЧХ исходной разомкнутой САУ. Снимая показания, видим, что график при пересечении отрицательной вещественной оси охватывает точку с координатами (-1;j0). Следовательно исходная система неустойчива.
Табл. 2
| Звенья | w,с-1 | |||||||||
| 0 | 2 | 5 | 10 | 20 | 50 | 100 | 150 | 200 | ||
| W1(jw) | A1(w) | ¥ | 175 | 70 | 35 | 17,5 | 7 | 3,5 | 2,3 | 1,75 |
| j1(w) | -90 | -90 | -90 | -90 | -90 | -90 | -90 | -90 | -90 | |
| W2(jw) | A2(w) | 1 | 1 | 0,999 | 0,999 | 0,998 | 0,986 | 0,949 | 0,895 | 0,832 |
| j2(w) | 0 | -0,38 | -0,95 | -1,91 | -3,81 | -9,45 | -18,4 | -26,5 | -33,7 | |
| W3(jw) | A3(w) | 1 | 0,51 | 0,23 | 0,12 | 0,06 | 0,02 | 0,012 | 0,008 | 0,006 |
| j3(w) | 0 | -59 | -76,5 | -83,2 | -86,6 | -88,6 | -89,3 | -89,5 | -89,7 | |
| W4(jw) | A4(w) | 1 | 0,999 | 0,995 | 0,981 | 0,928 | 0,707 | 0,447 | 0,316 | 0,243 |
| j4(w) | 0 | -2,3 | -5,7 | -11,3 | -21,8 | -45 | -63,4 | -71,6 | -76 | |
| A(w) | ¥ | 89,2 | 16 | 4,12 | 0,97 | 0,1 | 0,02 | 0,005 | 0 | |
| j(w) | -90 | -152 | -173 | -186 | -202 | -233 | -261 | -277 | -289 | |
Похожие работы



... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...
... . Таким образом, необходимость автоматизации технологических процессов очевидна и есть необходимость научиться рассчитывать параметры систем автоматического управления (САУ), для последующего применения своих знаний на практике. В курсовой работе произведен анализ динамических свойств заданной структурной схемы САУ с составлением и анализом математических моделей объектов управления. 2. Анализ ...
... можно судить, если в пространстве изменяемых параметров построить область устойчивости, т.е. выделить область значений параметров, при которых система сохраняет устойчивость. Область устойчивости в теории автоматического управления принято называть D – областью, а представление области параметров в виде областей устойчивости и неустойчивости называют D – разбиением. Построение области ...
... для переходной функции (22) Подставив эти выражения в формулу для h(t) и выполнив преобразования, получим связь между переходной функцией и ВЧХ: (23) Логарифмические частотные характеристики САУ Исследование систем существенно упрощается при использовании не обычных, а логарифмических частотных характеристик. При этом натуральная логарифмическая амплитудная и фазовая частотные ...
0 комментариев