Навигация
Двигатель постоянного тока
19399
знаков
3
таблицы
7
изображений
2.4 Двигатель постоянного тока
Рассмотрим участок системы, включающей ТП и двигатель. Входной величиной этого участка является Uд(t), а выходной — угловая скорость w(t) двигателя.
Найдем уравнение, связывающее w(t) и Uд(t).
Уравнение Uд(t) в электрической цепи, состоящей из ТП и обмотки якоря двигателя, имеет вид:
Uд(t) = ![]() , <1>
, <1>
где Rd – активное сопротивление обмоток и щеток двигателя;
Ld – индуктивность щеток;
eд(t) = ![]()
- противо ЭДС двигателя.
Можно считать, что магнитный поток двигателя Ф = const,
тогда:
eд(t) = ![]() ;
; ![]() ; <2>
; <2>
Подставляя <2> в <1> получим:
Uд(t) = ![]() <3>
<3>
Формула <3> - уравнение Uд(t) в рассматриваемой цепи. Однако в этой цепи есть и механическая энергия, поэтому необходимо составить уравнение моментов:
Mвр = ![]() ; <4>
; <4>
где J – момент инерции всех вращающихся частей, приведенных к валу двигателя, Нмс2;
Mc – приведенный момент сопротивления рабочего механизма.
Момент вращения двигателя
Mвр = ![]()
или учитывая, что Ф = const,
Mвр = ![]() ;
; ![]() .
.
Подставив Mвр в уравнение моментов, получим:
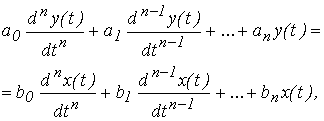
![]() =
= ![]() ; <5>
; <5>
Примем MC = 0, тогда
![]() =
= ![]() ; <6>
; <6>
Находим i из <6> и подставляем его в уравнение <3>:
Uд(t) =  <7>
<7>
или
 ; <8>
; <8>
где
![]()
- электромагнитная постоянная времени цепи;

- электромеханическая постоянная времени цепи;
![]() .
.
Характер переходной функции двигателя зависит от значений Тэ и Тм. Так как Тм = 0.833 с, Тэ = 0.02 с, то
![]() .
.
Тогда при ![]() получим
получим
<9>
Запишем <9> в операционной форме:
![]() <10>
<10>
откуда передаточная функция рассматриваемого участка:
Wд(S) =  . <11>
. <11>
Полученная передаточная функция соответствует передаточной функции апериодических звеньев.
2.5 Редуктор
Угол поворота приемного вала определяется соотношением:
 .
.
Запишем это уравнение в операционной форме:
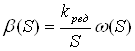 .
.
Передаточная функция звена:
Wред(S) =  .
.
Следовательно, динамической моделью редуктора является интегрирующее звено.
3. Дифференциальные уравнения и передаточные функции САУ
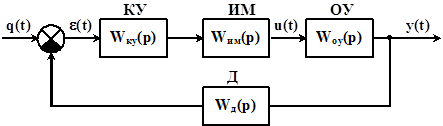
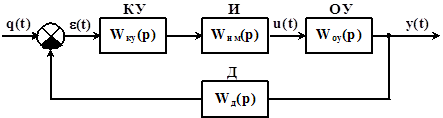
3.1 Структурная схема САУ
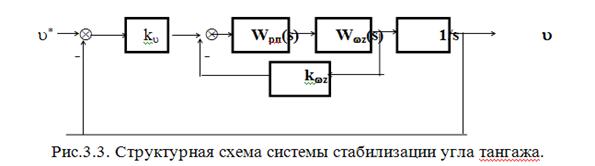
Структурная схема САУ представляет собой графическое изображение математической модели системы и отражает ее динамические свойства. Для получения структурной схемы САУ необходимо заменить временные уравнения на их изображения, представленных в операторном виде.
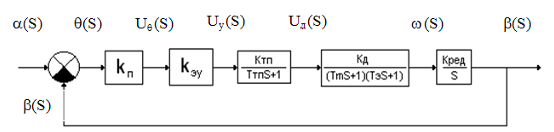
Рис.3 Структурная схема САУ
В приведенной на рис.3 системе нет местных обратных связей, и поэтому имеется только один замкнутый контур, образованный с помощью главной отрицательной обратной связи.
Похожие работы



... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...
... . Таким образом, необходимость автоматизации технологических процессов очевидна и есть необходимость научиться рассчитывать параметры систем автоматического управления (САУ), для последующего применения своих знаний на практике. В курсовой работе произведен анализ динамических свойств заданной структурной схемы САУ с составлением и анализом математических моделей объектов управления. 2. Анализ ...
... можно судить, если в пространстве изменяемых параметров построить область устойчивости, т.е. выделить область значений параметров, при которых система сохраняет устойчивость. Область устойчивости в теории автоматического управления принято называть D – областью, а представление области параметров в виде областей устойчивости и неустойчивости называют D – разбиением. Построение области ...
... для переходной функции (22) Подставив эти выражения в формулу для h(t) и выполнив преобразования, получим связь между переходной функцией и ВЧХ: (23) Логарифмические частотные характеристики САУ Исследование систем существенно упрощается при использовании не обычных, а логарифмических частотных характеристик. При этом натуральная логарифмическая амплитудная и фазовая частотные ...
0 комментариев