Навигация
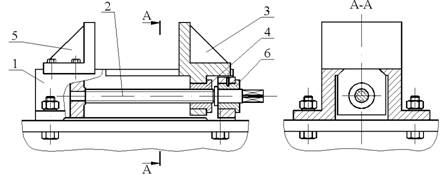
Конструирование винтового механизма
26794
знака
9
таблиц
25
изображений
Омский государственный технический университет
Кафедра «Детали машин»
Пояснительная записка.
Разработка винтового механизма
Студент Группа
Руководитель проекта
2005 г.
1. Расчет винтовой пары
1.1 Выбор расчетной нагрузки
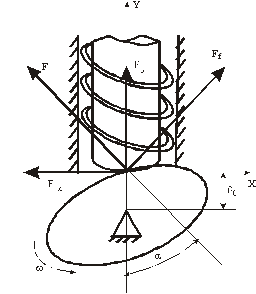
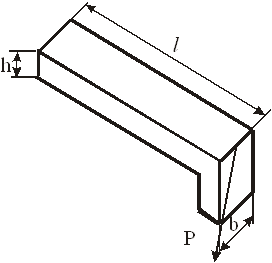
На резьбовую пару винтовых механизмов нагрузка прикладывается центрально, следовательно расчетная нагрузка FВ равна полезной нагрузке F:
FВ = 12 кН.
1.2 Материалы и допускаемые напряжения винта и гайки
Для изготовления деталей резьбовой пары применяют антифрикционные материалы с целью снижения потерь на трение. При этом винт выполняют всегда из сталей 35, 45, 40Х или Ст. 4, Ст. 5, Ст. б в улучшенном (закалка с высоким отпуском) или нормализованном состояниях.
Для изготовления гаек в виде вкладышей используют бронзы оловянистые и безоловянистые марок Бр. А9-Ж4; Бр. 010-Ф1; Бр. Об-Ц6-С3 и др., а также серые чугуны марок СЧ15; СЧ20 и др. В зажимных механизмах гайки выполняют из мягких сталей Ст. 2, Ст. 3, сталей 15, 20, 25.
Допускаемые напряжения [s] для винтов, стальных и чугунных гаек выбирают дифференциальным способом.
![]()
где sпр - предельное напряжение материала, n - допускаемое значение коэффициента запаса прочности. Рекомендуют следующие допускаемые напряжения для бронзовых гаек: [tср] = 30 МПа; [sр] = 40 – 45 МПа; [sиз] = 45 – 50 МПа; [sсм] = 60 МПа.
Выполним расчет для винта, изготовленного из стали 45, и гайки, выполненной из бронзы марки Бр. 010-Ф1.
Допускаемые напряжения винта:
объемная закалка, HB 335 - 490, [sВ] = 1000 МПа; [sТ] = 750 МПа; [s-1] = 430 МПа.
Допускаемые напряжения гайки:
[tср] = 30 МПа; [sр] = 42,5 МПа; [sиз] = 47,5 МПа; [sсм] = 60 МПа.
1.3 Выбор типа резьбы
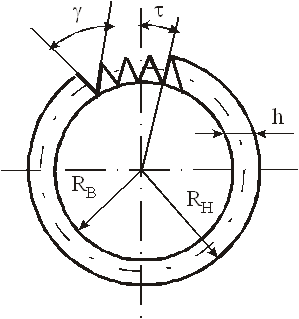
Свойства резьбы определяются относительной толщиной витка у основания ya= a / p, относительной высотой витка yh= h / p и рабочим углом g. Для каждого типа резьбы эти параметры постоянны. Параметр ya, определяет прочность витков резьбы на изгиб и срез; yh - характеризует стойкость витков резьбы на износ, а параметр у обусловливает КПД винтовой пары.
Применение каждого типа резьбы определяется соответствием ее параметров ya, yh, g предъявляемым к механизму требованиям.
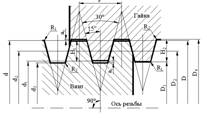
Трапецеидальная резьба (см. рис. ниже) – основной тип резьбы для винтовых механизмов, широко применяется благодаря универсальности свойств. Прочность (ya = 0,67), стойкость на износ (yh = 0,5) и КПД (g = 15°) удовлетворительные. Технологичность трапецеидальной резьбы хорошая, так как ее можно нарезать инструментом любого типа. Резьба стандартизирована, ее параметры определены ГОСТ 9484-81.
Упорная резьба наиболее приспособлена к работе в условиях большого трения и износа. Превосходит трапецеидальную резьбу по стойкости на износ (yh = 0,75) и КПД (g = 3°). Прочность витков (ya = 0,7), а технологичность упорной и трапецеидальной резьб примерно одинаковы. Упорная резьба стандартизована, ее размеры даются в ГОСТ 10177-82. Из-за несимметричности профиля упорная резьба может применяться только в нереверсивных механизмах, т. е. в таких, где рабочая нагрузка имеет одно направление.
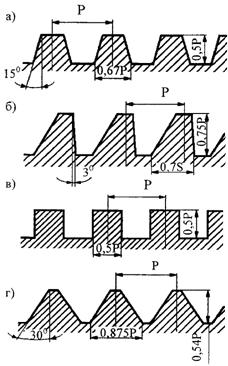
Ленточная (прямоугольная) резьба по свойствам близка к трапецеидальной резьбе. Размеры резьбы не стандартизованы. Резьбу делают квадратной ya = yh = 0,5. Шаг и диаметры резьбы удобно назначать по стандарту на трапецеидальную резьбу. Уступая по прочности трапецеидальной резьбе, ленточная резьба превосходит ее по КПД (g = 0°).
Технологичность ленточной резьбы невысока, т.к. ее можно нарезать только резцом. Однако винтовые механизмы с ленточной резьбой обеспечивают наибольшую точность перемещений. Поэтому ее применяют для ходовых винтов особо точных механизмов подач.
Метрическая резьба - основной тип резьбы для болтовых соединений, обладает высокой прочностью (ya = 0,875), удовлетворительной стойкостью на износ (yh = 0,54) и низким КПД (g = 0°), технологичность ее - отличная.
В винтовых механизмах применение метрической резьбы ограничивается зажимными приспособлениями, где по условиям самоторможения выгодно иметь большое трение. Для уменьшения износа применяется резьба только с крупным шагом. Резьба стандартизована, ее размеры даются в ГОСТ 24705-81.
Сопоставив параметры и технологичность тех или иных резьб, остановим выбор на трапецеидальной резьбе: ya = 0,67, yh = 0,5, g = 15°.
1.4 Расчёт резьбовой пары на износ
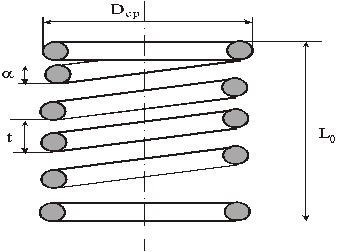
Износостойкость резьбы является основным критерием, определяющим работоспособность винтовой пары. Поэтому размеры резьбы находят из ее расчета на износ по удельной нагрузке, которую принимают равномерно распределенной по виткам гайки. Таким образом, удельная нагрузка (см. рис.):
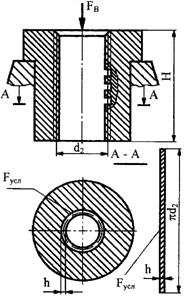
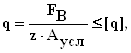
где FВ – нагрузка на винт, Н; z – число витков гайки; АУСЛ – условная площадь витка, мм, q – допустимая из условия износа удельная нагрузка на виток, МПа.
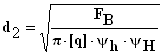
Выразив z и АУСЛ через шаг резьбы р, относительную высоту гайки как yH = H / d2 и относительную высоту витка yh = h / p (h - расчетная высота витка), получим
![]()
Откуда средний диаметр резьбы

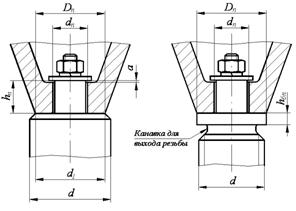
а высота гайки
![]()
Рекомендуется принимать yH = 1,2 – 2,5.
Значения, близкие к верхнему пределу, следует применять когда винт работает только на растяжение.
Относительную высоту гайки yH примем равной 1,3, т.к. винт работает на растяжение и на сжатие.
Рекомендуемая удельная нагрузка [q], МПа и коэффициенты трения f в винтовой паре даны в таблице.
| Материалы винтовой пары | Условия смазки | |||||
| Отличные | Средние | Плохие | ||||
| [q] | f | [q] | f | [q] | f | |
| Бронза-сталь | 12 | 0,07 | 8 | 0,09 | – | – |
| Чугун-сталь | – | – | 6 | 0,11 | 4 | 0,13 |
| Сталь-сталь | – | – | – | – | 15 | 0,15 |
Условия смазки примем средними, т.е [q] = 8 МПа, f = 0,09.
Вычислим средний диаметр резьбы:
![]()
и высоту гайки:
![]()
![]()
1.5 Выбор шага резьбы
По d2 из ГОСТ 9484-81 выбираем основные размеры стандартной резьбы: d – наружный диаметр; d2 - средний диаметр; d1 – внутренний диаметр; p - шаг резьбы.
Для каждого диаметра имеются крупный, нормальный и мелкий шаги.
Крупный шаг позволяет получить высокий КПД винтовой пары.
Мелкий шаг выгоднее с точки зрения выигрыша в силе.
Выбор шага резьбы:
1. В ручных механизмах выигрыш в силе важнее КПД, поэтому в них предпочитают мелкий и нормальный шаги; мы примем нормальный шаг, т.к. он является предпочтительным.
2. Условия работы механизма требуют, чтобы винтовая пара была самотормозящаяся, то шаг резьбы подсчитывается из условия самоторможения:
![]() или
или ![]() или
или ![]()
отсюда
![]()
где a – угол подъема винтовой линии; jE – приведенный угол трения.
Вычислим:
![]()
![]()
3. Выбирают тот шаг, для которого число витков z = Н / р невелико, так как число витков в гайке не должно быть более 15. Вычислим:
![]()
![]()
На основании расчетных данных выбираем из ГОСТ 9484-81 конкретную резьбу с параметрами: d = 32 мм, p = 6 мм, d1 = 25 мм, d2 = 29 мм, D4 = 33 мм, D1 = 26 мм, aC = 0,5 мм. Уточним значения H и z:
![]()
![]() примем H = 38 мм;
примем H = 38 мм;
![]()
![]() примем z = 6,3.
примем z = 6,3.
Похожие работы
... на кольцевой пяте будет равен: , (8) где = 0,10…0,12 – коэффициент трения стальной чашки о стальной винт. По формуле (8) рассчитываем: 4. Расчет гайки Проектирование гайки Ходовая гайка винтового механизма должна иметь простую конструкцию, легко монтироваться, не проворачиваться в корпусе из-за момента трения в резьбе и не выпадать при ...
... ; фС- красный; 0-шина: изолированный контроль– белый; заземлённая нейтраль–чёрный. 2. ~; фаза–красный; 0–жёлтый. 3. –; (+)–красный; (–)–синий; нейтраль–белый. Лекция 20. "Основы конструирования" Основы патентоведения 1.0 Введение –Изобретательство – важный фактор ТП.– Изобретательское право (ИП).– Открытия, Изобретения, Промышленные образцы – объекты изобретательского права (Субъекты ...
... . Р1=Рcosa,(36) Р1 – движущая сила, используемая для преодоления сил полезных сопротивлений: Р из Т.3=6 Н. Р1=5,66 Н. Fтр=0,55 H< Р1=5.66 H. Из этого следует, что толкатель при работе программного механизма не заклинит, и он будет двигаться по поверхности кулачка и отвечать заданной программе. Таким образом, конструкция спроектированного кулачка и толкателя соответствует требуемым ...
... , привода кинематической передачи и кулачкового механизма. Толкатель кулачкового механизма соединяется с исполнительным элементом системы управления движением летательного аппарата. Входной величиной программного механизма является число импульсов, подаваемых на шаговый электродвигатель, выполненный из электромагнита, храпового колеса, толкающей и стопорной собачек, а выходной – прямолинейное ...
0 комментариев