Навигация
Содержание
Аннотация
Введение
Описание конструкции. Принцип действия прибора.
1. Кинематический расчет.
2. Расчет червячной передачи.
3. Расчет шагового механизма.
3.1 Выбор электромагнита.
3.2.Расчет храпового колеса.
4. Расчет кулачкового механизма.
4.1 Расчет кулачка.
4.2 Расчет цилиндрической пружины толкателя.
4.3 Расчет толкателя. Определение реакций опор толкатель
5. Контактный расчет.
5.1 Контактный расчет кулачкового механизма.
5.2 Контактный расчет червячной передачи.
6. Расчет опор выходного вала. Выбор шарикоподшипников.
Заключение.
Список используемой литературы.
Приложение.
Аннотация
В данной пояснительной записке к курсовому проекту на тему “Программный механизм” приведен расчет такого устройства, как программный механизм. Рассчитываются его основные узлы и конструкция прибора. Расчет ведется на основе соответствующей литературы, а также с активным применением вычислительной техники – все численные значения, приведенные в пояснительной записке, получены при использовании программного обеспечения, значительно упрощающего процесс расчета. В качестве примера в приложении приведена программа расчета профиля кулачка, написанная на языке программирования Паскаль, реализация Borland Pascal 7.0.
Основной целью данного курсового проекта является ознакомление с основными приемами проектирования гироскопических устройств, а также, в частности, с конструктивными особенностями, принципом работы и т.д. последних.
Введение
В системах автоматического управления часто используются механизмы, которые позволяют осуществлять замыкания и размыкания различных контактов с заданной выдержкой времени и в определенной последовательности, соответствующей заранее установленной программе, которая по мере надобности также может изменяться. В данных механизмах применяется электромеханический способ осуществления требуемой выдержки времени срабатывания контактов.
Программный механизм, расчет которого приведен в пояснительной записке, является основным узлом арретирующих устройств. Арретирующие устройства обеспечивают жесткую фиксацию подвижных узлов гироприбора относительно друг друга, а также корпуса прибора. Это необходимо, например, при транспортировке гироприборов для избежания повреждений, также, как для начальной выставки подвижного узла гироприбора, так и для разворотов этих узлов на заданные углы.
Поэтому все параметры, характеризующие арретирующее устройство, определяются именно программным механизмом. Такими параметрами являются:
- Время арретирования и разарретирования.
- Точность арретирования.
К этим параметрам зачастую предъявляются весьма жесткие требования. Поэтому они являются определяющими при расчете конструкции арретирующего устройства, и программного механизма, в частности.
Описание конструкции. Принцип действия прибора
Программный механизм является электромеханической системой, предназначенной для обеспечения поступательного движения толкателя (выходного звена) по определенному закону (программе) за счет профиля кулачка, выполненного по определенной программе.
Программный механизм состоит из шагового электродвигателя, привода кинематической передачи и кулачкового механизма. Толкатель кулачкового механизма соединяется с исполнительным элементом системы управления движением летательного аппарата.
Входной величиной программного механизма является число импульсов, подаваемых на шаговый электродвигатель, выполненный из электромагнита, храпового колеса, толкающей и стопорной собачек, а выходной – прямолинейное перемещение толкателя по заданной программе.
При подаче импульсов на электромагнит шагового механизма, движение от якоря, жестко связанного с толкающей собачкой, передается на храповик, затем через червячную передачу передается на выходной вал с кулачком и к толкателю. Стопорная собачка предохраняет храповик от поворота в обратную сторону при возвращении якоря в исходное положение (при отсутствии импульса). Пружина обеспечивает силовое замыкание кулачка и толкателя между собой.
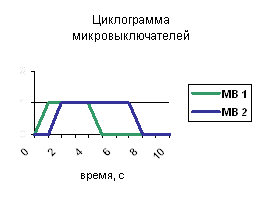
Контактные группы служат для выключения электромагнита при отработке программы, а также для коммутации других электрических цепей управления.
Кинематическая схема программного механизма приведена в приложении.
Исходные данные
Частота импульсов 22 Гц.
Цена оборота кулачка 5800 импульсов/оборот.
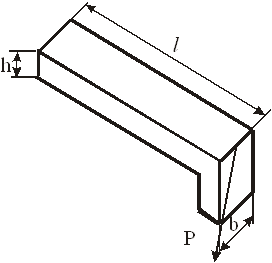
Ход толкателя 7 мм.
Наибольшее давление на толкатель 5,5 Н.
Программа Линейная
Условия эксплуатации прибора
Температурный режим 40С.
Линейные перегрузки 4 ед.
Амплитуда и частота колебаний ЛА 0,02-0,04 мм, 500 Гц.
Смазка механизма – разовая, консистентными маслами.
Срок службы – не менее 2000 ч.
1.Кинематический расчет
Программный механизм состоит из следующих блоков:
- Шаговый механизм.
- Червячная передача.
- Кулачковый механизм.
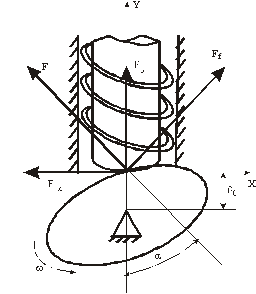
Определим передаточное число. Оно, как известно, находится как отношение выходной и входной угловых скоростей. Определим угловую скорость на храповом колесе в зависимости от входной частоты и геометрических параметров шагового механизма. Как видно из рисунка, выражение для угловой скорости может быть записано в следующем виде:
![]() (1.1)
(1.1)
где: А – целая часть от отношения h2/t. Вводится в рассмотрение так как если ход толкающей собачки не кратен шагу зубьев храпового колеса, то при возврате толкающей собачки колесо вернется на величину излишка хода (за счет прижима стопорной собачки).
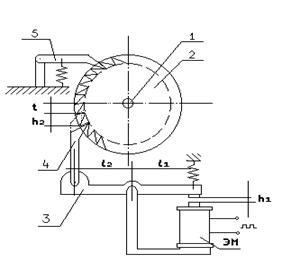
Рис 1. Кинематическая схема шагового механизма
- вал.
- храповое колесо.
- якорь.
- толкающая собачка.
f – частота на входе ЭМ.
t – шаг зубьев храпового колеса.
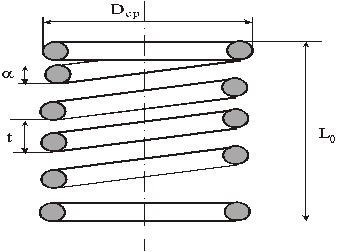
![]() (1.2 )
(1.2 )
D – диаметр храпового колеса.
z – число зубьев.
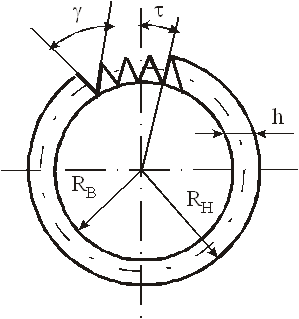
![]() (см. рис.)(1.3)
(см. рис.)(1.3)
Подставляя эти формулы в исходную, получаем итоговое выражение для угловой скорости храпового колеса:
![]() (1.4)
(1.4)
Теперь определим скорость вращения кулачка в зависимости от входной частоты и цены одного оборота кулачка:
![]() (1.5)
(1.5)
где:k – цена одного оборота кулачка.
Исходя из полученных выражений, запишем передаточное число для червячной передачи
Стопорная собачка
![]() (1.6)
(1.6)
Соответственно, передаточное отношение:
![]() (1.7)
(1.7)
Учитывая то, что как большое количество зубьев храпового колеса, так и большое передаточное число червячной передачи дадут увеличение габаритных размеров всего механизма, примем следующие значения (геометрические параметры (см. рис.) выберем таким образом, чтобы к-нт А равнялся 1):
![]() ,
, ![]() .
.
Похожие работы
... . Р1=Рcosa,(36) Р1 – движущая сила, используемая для преодоления сил полезных сопротивлений: Р из Т.3=6 Н. Р1=5,66 Н. Fтр=0,55 H< Р1=5.66 H. Из этого следует, что толкатель при работе программного механизма не заклинит, и он будет двигаться по поверхности кулачка и отвечать заданной программе. Таким образом, конструкция спроектированного кулачка и толкателя соответствует требуемым ...
... 5 установить в опоры скольжения корпуса поз.11. 7. Установить крышку поз12 и прикрутить ее винтами поз.15 и штифтами поз.20. Заключение В курсовом проекте спроектирован редуктор программного механизма. Все требования удовлетворены, и поставленные задачи выполнены. Достигнута необходимая точность работы устройства. В конструкции имеются унифицированные детали. Использованы типовые методы ...
... территорий, а также являются базисом для создания эффективных инструментов политики, особенно для регионального развития. Функционирование программных механизмов в российских условиях. Проблемы социально-экономического развития регионов носят масштабный характер. В перспективе возможно, что Россия, как и другие страны, будет одновременно внедрять макро-, микро- и координационную политику для ...
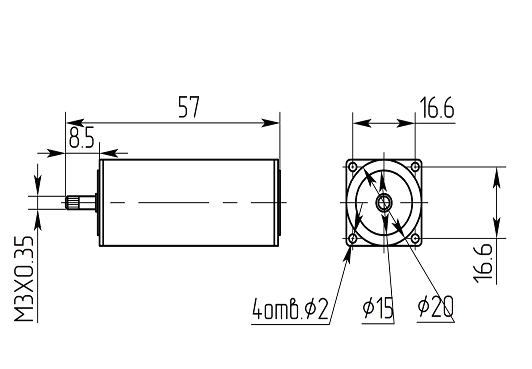
вляет собой четырёхступенчатый редуктор. Привод механизма осуществляется электродвигателем серии ДПМ-20 переменного тока, широко применяющегося в системах автоматики. В данном курсовом проекте программный механизм приводится в действие от электродвигателя постоянного тока серии ДПМ (тип двигателя из условия ДПМ-20). Распределение передаточных отношений производится с учетом получения минимальных ...
0 комментариев