Навигация
Расчёт прочих деталей винтового механизма
26794
знака
9
таблиц
25
изображений
2. Расчёт прочих деталей винтового механизма
2.1 Разработка опорных узлов винтового механизма
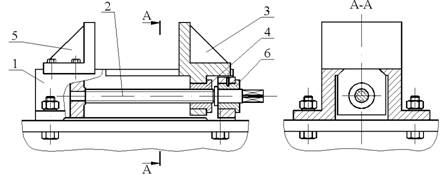
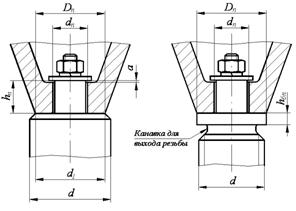
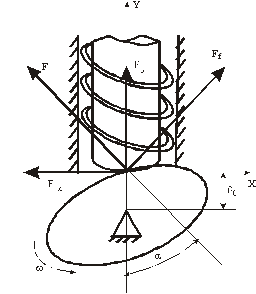
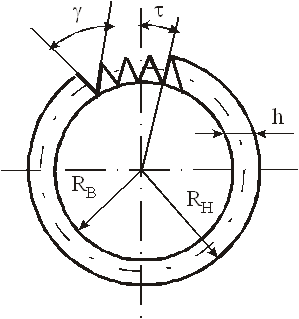
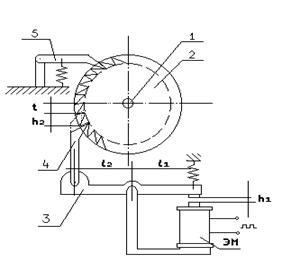
В качестве опорного узла домкрата используется кольцевая пята (см. рис.).
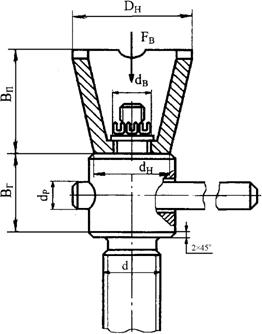
пределим основные размеры опорного узла:
BП = (1,5..2,0)·d, BП = 1,75·d = 1,75·32 = = 56 мм » 60мм;
dВ = (1/3..1/2)·d, dВ = (5/12)·d = (5/12)·32 = = 13,(3) мм » 14 мм;
dН = 1,8·d = 1,8·32 = 57,6 мм » 60 мм;
DН = (2,4..2,5)·d, DН = 2,45·d = 2,45·32 = = 78,4 мм » 80 мм;
BГ = 1,5·d = 1,5·32 = 48 мм;
dР = (1/3..1/2)· BГ, dР = (1/3)·BГ = (1/3)·48 = = 16 мм;
Выбранные размеры округлены до стандартных согласно ГОСТ 6636-69.
Материал пяты: чугун (СЧ15).
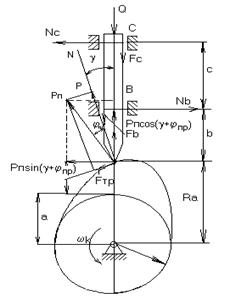
Подсчитаем момент торцевого трения:


Пята изготовляется путем отливки.
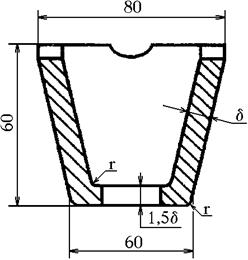
![]()
где L, B, H – габаритные размеры отливки (соответственно длина, ширина, высота), мм;
![]()
![]()
d примем равным 5 мм.
![]()
r примем равным 3 мм.
2.2 Разработка узла рукоятки
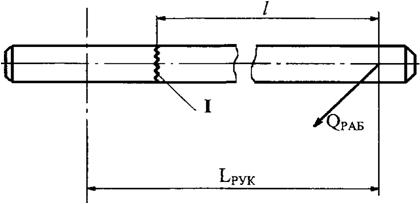
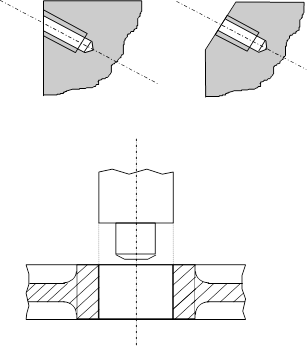
Расчет узла рукоятки (см. рис.) сводится к определению ее длины (LРУК) и диаметра (dР). Сначала подсчитывают момент на рукоятке
TРУК = TРЕЗ + TТ / U,
где U - передаточное число зубчатой передачи, если она предусмотрена между рукояткой и винтом для выигрыша в усилии на рукоятке. Но в нашем случае она не предусмотрена и U = 1.
TРУК = TРЕЗ + TТ = 137,6968 Н·м + 41,348 Н·м = 179,04 Н·м.
Зная TРУК, можно определить расчетную длину рукоятки как
 100 см,
100 см,
где QРАБ – усилие рабочего на рукоятке, принимаемое по таблице.
| Рекомендуемые усилия рабочего на рукоятке винтовых механизмов | |
| Режим работы | QРАБ(Н) |
| Непрерывная работа | До 120 |
| Периодическая работа | До 160 |
| Кратковременная работа | До 240 |
| То же в исключительных случаях | До 300 – 400 |
![]() = 240 Н.
= 240 Н.
Для уменьшения LРУК предусматривают работу одновременно двух рабочих.
Чтобы учесть неравномерность их работы, усилие 2![]() умножают на коэффициент неравномерности работы 0,8:
умножают на коэффициент неравномерности работы 0,8:
QРАБ = 2![]() ·0,8 = 2·240 Н·0,8 = 384 Н.
·0,8 = 2·240 Н·0,8 = 384 Н.
Примем LРУК равной 480 мм. В натуре длина рукоятки большее и составляет 500 мм.
Короткие рукоятки делают сплошными.
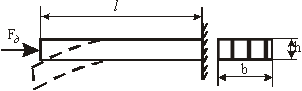
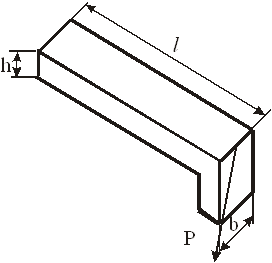
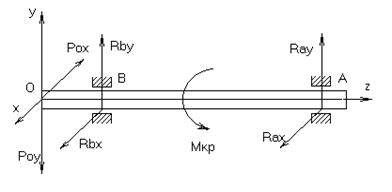
Рукоятки проверим на прочность (на изгиб по схеме консольной балки (см. рис.)) по формуле

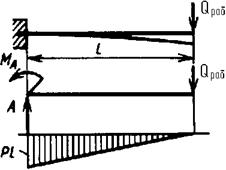
Материал рукоятки: сталь 40Х (термическая обработка - улучшение).
Определим допускаемое напряжение:
![]()
где sт =650 МПа.
![]()

увеличим диаметр рукоятки dР до 20 мм:
 условие выполняется.
условие выполняется.
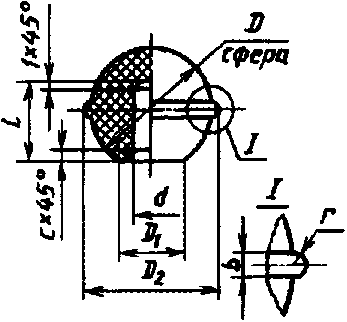
На конце рукоятки устанавливается пластмассовая ручка (см. рис. ниже), которая выбирается по нормали машиностроения МН 6 – 64. Исполнение I, размеры в мм приведены в таблице.
| Общие размеры | Пластмассовая ручка | ||
| D | 50 | D2 | 52 |
| D1±0,5 | 20 | d | 12 |
| d1 | М12 | l | 24 |
| r | 1,0 | ||
| b | 2,0 | ||
| c | 1,8 | ||
Похожие работы
... на кольцевой пяте будет равен: , (8) где = 0,10…0,12 – коэффициент трения стальной чашки о стальной винт. По формуле (8) рассчитываем: 4. Расчет гайки Проектирование гайки Ходовая гайка винтового механизма должна иметь простую конструкцию, легко монтироваться, не проворачиваться в корпусе из-за момента трения в резьбе и не выпадать при ...
... ; фС- красный; 0-шина: изолированный контроль– белый; заземлённая нейтраль–чёрный. 2. ~; фаза–красный; 0–жёлтый. 3. –; (+)–красный; (–)–синий; нейтраль–белый. Лекция 20. "Основы конструирования" Основы патентоведения 1.0 Введение –Изобретательство – важный фактор ТП.– Изобретательское право (ИП).– Открытия, Изобретения, Промышленные образцы – объекты изобретательского права (Субъекты ...
... . Р1=Рcosa,(36) Р1 – движущая сила, используемая для преодоления сил полезных сопротивлений: Р из Т.3=6 Н. Р1=5,66 Н. Fтр=0,55 H< Р1=5.66 H. Из этого следует, что толкатель при работе программного механизма не заклинит, и он будет двигаться по поверхности кулачка и отвечать заданной программе. Таким образом, конструкция спроектированного кулачка и толкателя соответствует требуемым ...
... , привода кинематической передачи и кулачкового механизма. Толкатель кулачкового механизма соединяется с исполнительным элементом системы управления движением летательного аппарата. Входной величиной программного механизма является число импульсов, подаваемых на шаговый электродвигатель, выполненный из электромагнита, храпового колеса, толкающей и стопорной собачек, а выходной – прямолинейное ...
0 комментариев