Навигация
КРАТКОЕ ОПИСАНИЕ ИССЛЕДУЕМОЙ САУ
19484
знака
4
таблицы
15
изображений
1 КРАТКОЕ ОПИСАНИЕ ИССЛЕДУЕМОЙ САУ
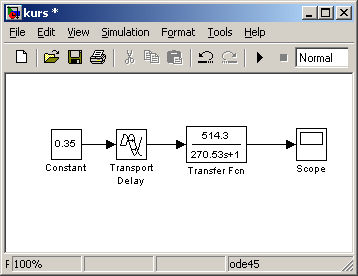
Функциональная схема САП температуры нагрева металлического сердечника электропечи представлена на рисунке 1.1:
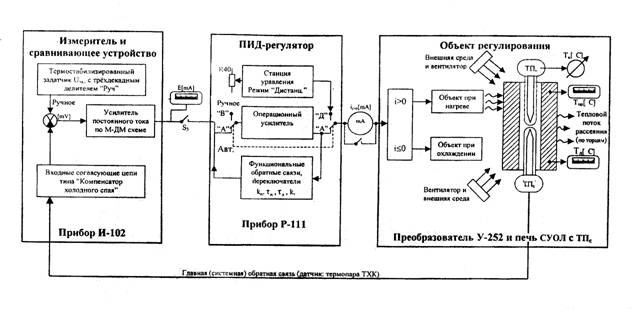
Рисунок 1.1 - Функциональная схема САП температуры нагрева металлического сердечника электропечи
Автоматическое регулирование температурного режима осуществляется системами управления с обратной связью, вырабатывающими управляющие воздействия в зависимости от величины знака отклонения регулируемой величины от заданного значения.
В качестве объекта исследования рассмотрим промышленную электрическую печь СУОП-015.20/12М-43 в системе автоматической стабилизации температуры, выполненной на базе высокочастотного регулятора температуры ВРТ-3.
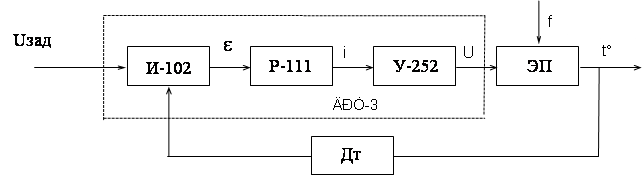
Система автоматической стабилизации температуры электропечи выполнена на промышленных приборах государственной системы промышленных приборов и средств автоматизации (ГСП) аналоговой электрической ветви. Ее структурная схема представлена на рисунке 1.2.
![]()
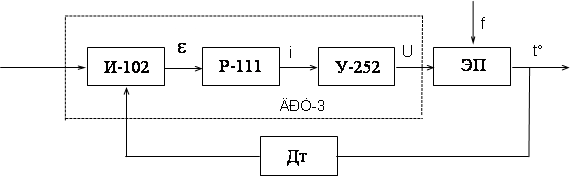
![]() Рисунок 1.2 – Структурная схема исследуемой САУ
Рисунок 1.2 – Структурная схема исследуемой САУ
Сигнал с датчика температуры Дт (термопара) поступает на вход. В блоке И-102 сигнал термопары компенсируется сигналом от встроенного задатчика и разница этих сигналов усиливается предварительным усилителем блока И-102.
Усиленный сигнал ошибки e поступает на вход регулирующего аналогового прибора Р-111, в котором могут быть сформированы П, ПИ, ПИД законы регулирования. Реализация типовых законов регулирования осуществляется на базе операционного усилителя с использованием RC-звеньев коррекции в цепи обратной связи. Р-111 имеет индикаторы, по которым можно контролировать величину разбаланса и выходной ток, органы динамической настройки, а также переключатель управления, позволяющий перейти на ручное управление объектом и обеспечивающий "безударное" переключение.
Усиленный сигнал, с выхода У-252, в виде напряжения подаётся в цепи нагрева электропечи.
2 ПОСТРОЕНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ОБЪЕКТА УПРАВЛЕНИЯ
2.1 Методы математического описания объектов управления
Для построения высокоэффективной системы управления необходимо иметь описание объекта управления в виде математической модели. Для описания объектов управления, в которых отсутствует зависимость переменных состояния, управления от пространственных координат (линейные многомерные системы с сосредоточенными параметрами), используются системы линейных обыкновенных дифференциальных уравнений или соответствующие изображения по Лапласу. Рассмотрим многомерную линейную систему с m - управлениями, l - возмущениями и k - входами. Модель линейной системы с сосредоточенными параметрами во временной области:
![]() (2.1)
(2.1)
где х(t) – вектор состояния системы, ![]() ;
;
u(t) – вектор управлений (входов), ![]() ;
;
у(t) – вектор выходов, ![]() ;
;
f(t) – вектор возмущений, ![]() ;
;
А – матрица размерности n x n;
В – матрица размерности n x m;
D – матрица размерности n x l;
С – матрица размерности k x n.
Применяя преобразование Лапласа к системе, получим эквивалентную модель в комплексной области:
![]() (2.2)
(2.2)
или
![]() (2.3)
(2.3)
Частотное или временное представления выбираются из соображений удобства, так как в случае постоянных матриц A, B,C и D они эквивалентны. Для построения подобных моделей можно использовать два пути: применять фундаментальные физические соотношения в виде законов сохранения вещества, энергии или восстанавливать параметры моделей по эмпирическим данным, причем второй путь более часто применяется на практике.
2.2 Экспериментальные данные
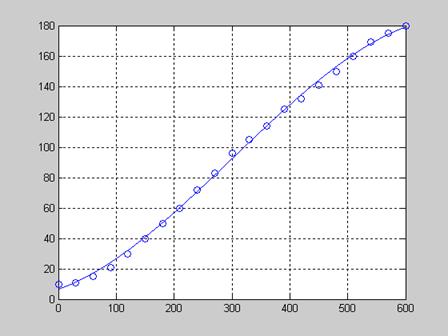
Для построения математической модели объекта управления использовался метод восстановления параметров модели по эмпирическим данным. Для этого с помощью лабораторной установки были получены экспериментальные данные для исследования объекта управления и построения его математической модели. Результаты снятия экспериментального переходного процесса приведены в Приложении А.
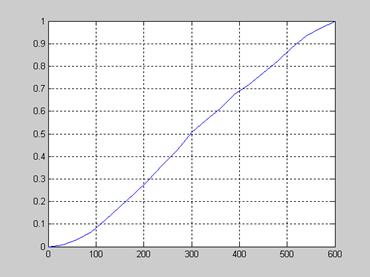
Нормирование переходных процессов проводилось в MathCAD-е по следующему соотношению:
![]() (2.4)
(2.4)
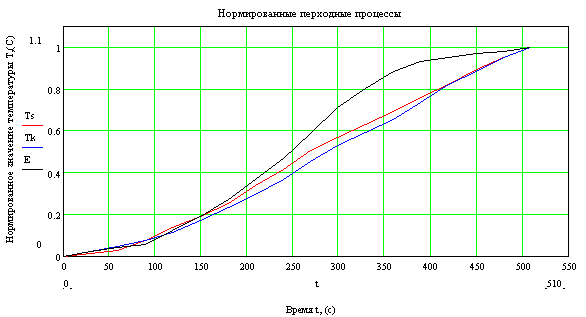
Рисунок 2.1 – Экспериментальный нормированный переходной процесс
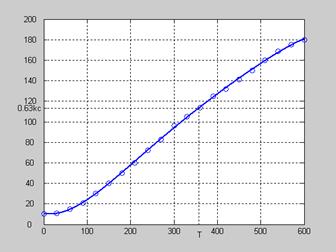
Так динамика этих процессов совпадает, то можно для улучшения экспериментальных данных усреднить два процесса, и для усреднённого процесса искать аппроксимирующую модель объекта управления. Усредненный переходный процесс изображён на рисунке 2.2.
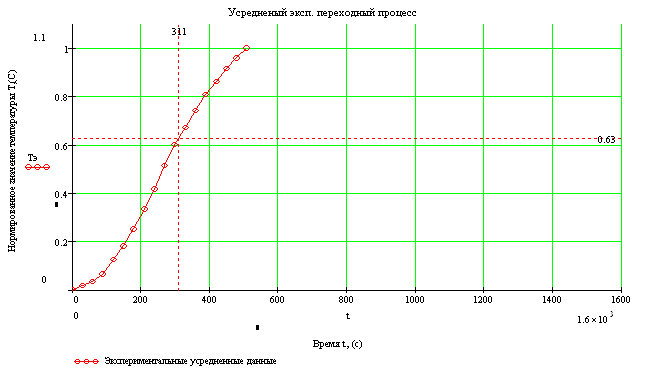 Рисунок 2.2 – Усредненный переходный процесс
Рисунок 2.2 – Усредненный переходный процесс
Структура аппроксимирующего выражения для передаточной функции объекта может быть выбрана в общем случае в виде:
![]() (2.5)
(2.5)
Коэффициент усиления объекта управления ![]() можно найти по статической характеристике. Постоянные времени передаточной функции могут быть найдены по реакции системы на единичный скачок, т.е. по полученному усреднённому переходному процессу.
можно найти по статической характеристике. Постоянные времени передаточной функции могут быть найдены по реакции системы на единичный скачок, т.е. по полученному усреднённому переходному процессу.
Похожие работы
... Р-111. В процессе исследований необходимо получить математическую модель объекта управления в виде передаточной функции. Осуществить выбор параметров настройки регулятора, при которых система удовлетворяет заданным требованиям по точности и качеству. 1 ОПИСАНИЕ СИСТЕМЫ СТАБИЛИЗАЦИИ ТЕМПЕРАТУРЫ ЭЛЕТРОПЕЧИ ВРТ-3 Автоматическое регулирование температурного режима осуществляется системами ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
... К. Сатпаева» для просмотра и ввода информации системы оперативно-диспетчерского контроля и управления, создаваемые на Visual Basic. Специфика используемого в системе оперативно-диспетчерского контроля и управления РГП «Канал им. К. Сатпаева» ПО такая, что разработка ПО, как таковая, может производиться только при создании самой системы. Применяемое ПО является полуфабрикатом. Основная задача ...



... состава, введенным согласно закону «О городском пассажирском транспорте», договорных отношений между местными властями и транспортными предприятиями. 3. РЕСУРСОСБЕРЕГАЮЩИЕ ТЕХНОЛОГИИ НА ГОРОДСКОМ ЭЛЕКТРИЧЕСКОМ ТРАНСПОРТЕ 3.1. Регенерация масел Установки для регенерации отработанных масел и схемы технологического процесса Проводимые исследования кафедрой городского электрического транспорта ( ...
0 комментариев