Навигация
Посторонние математической модели методом площадей
19484
знака
4
таблицы
15
изображений
2.5 Посторонние математической модели методом площадей
При q=1 и t=0 получаем объект второго порядка. Рассчитать постоянные времени T1 и T2 можно при помощи метода площадей:
![]() (2.14)
(2.14)
Построим математическую модель системы при помощи метода площадей:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Так как ![]() меньше чем 0.75, то метод площадей применять нельзя, применим упрощенный метод площадей. Упрощённый метод площадей:
меньше чем 0.75, то метод площадей применять нельзя, применим упрощенный метод площадей. Упрощённый метод площадей:
Абсцисса точки перегиба равна: ![]() ;
;
Коэффициент усиления: ![]() .
.

 (2.15)
(2.15)
Рассчитаем значения постоянных времени:
![]()
![]()
![]()
![]() .
.
2.6 Построение математической модели методом Ротача
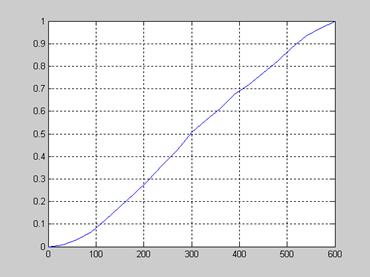
Проведем в точке перегиба касательную, для определения интервала времени Т0, заключенного между точками пересечения этой касательной оси абсцисс и линии установившегося значения h(∞) переходной характеристики. В рассматриваемом случае: T0=440, tп=150, h(tп)=0,181. Введем обозначение: ![]() (q=1).
(q=1).
Возьмем запаздывание t=0, тогда получаем следующую модель:
![]() (2.16)
(2.16)
Для нахождения T0 проводим касательную через точку перегиба и находим точки её пересечения с уровнями 0 и 1.
Применим алгоритм метода Ротача для звена 2-го порядка, т.е. q=1 t=61:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Рассчитаем значения постоянных времени:
![]()
![]()
![]()
![]()
Передаточная функция будет иметь вид:
![]()
![]()
![]()
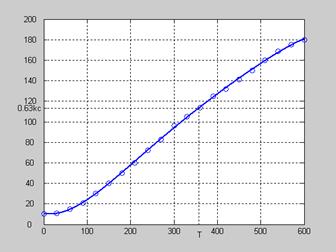
Переходной процесс задается формулой:
![]()
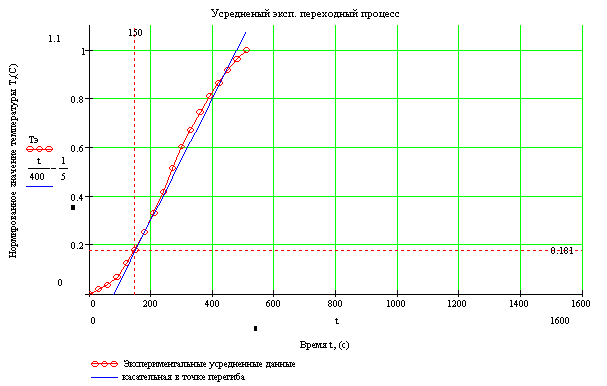
Рисунок 2.5 – Переходный процесс для модели объекта
2.7 Выбор окончательной аппроксимирующей модели
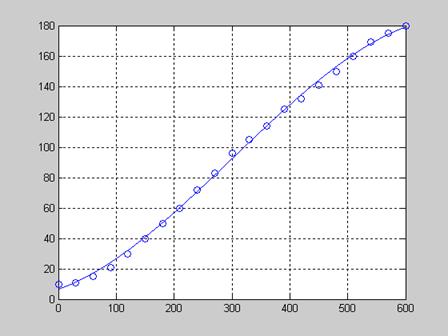
Для выбора лучшей аппроксимирующей модели объекта управления среди найденных моделей сравним теоретические и экспериментальный переходные процессы (рисунок 2.6).
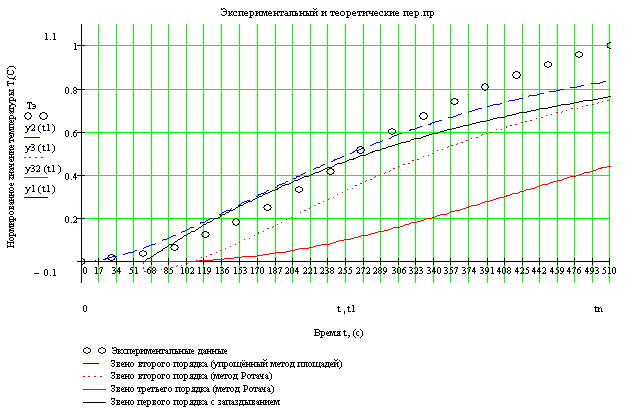
Рисунок 2.6 – Теоретические и экспериментальный переходные процессы
Для оценки качества полученных передаточных функций описывающих объект управления вычислим оценку χ2:
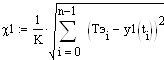
![]() - звено первого порядка с запаздыванием
- звено первого порядка с запаздыванием
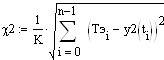
![]() - звено второго порядка (упрощенный метод площадей)
- звено второго порядка (упрощенный метод площадей)
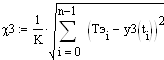
![]() - звено второго порядка (метод Ротача)
- звено второго порядка (метод Ротача)
Так как наименьшая оценка χ2 получилась у модели построенной по упрощенному методу площадей, то примет ее за окончательную модель объекта управления.
Передаточная функция объекта управления имеет вид:
![]() (2.17)
(2.17)
Похожие работы
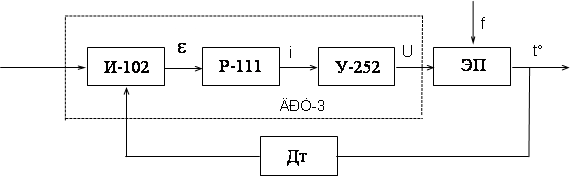
... Р-111. В процессе исследований необходимо получить математическую модель объекта управления в виде передаточной функции. Осуществить выбор параметров настройки регулятора, при которых система удовлетворяет заданным требованиям по точности и качеству. 1 ОПИСАНИЕ СИСТЕМЫ СТАБИЛИЗАЦИИ ТЕМПЕРАТУРЫ ЭЛЕТРОПЕЧИ ВРТ-3 Автоматическое регулирование температурного режима осуществляется системами ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
... К. Сатпаева» для просмотра и ввода информации системы оперативно-диспетчерского контроля и управления, создаваемые на Visual Basic. Специфика используемого в системе оперативно-диспетчерского контроля и управления РГП «Канал им. К. Сатпаева» ПО такая, что разработка ПО, как таковая, может производиться только при создании самой системы. Применяемое ПО является полуфабрикатом. Основная задача ...



... состава, введенным согласно закону «О городском пассажирском транспорте», договорных отношений между местными властями и транспортными предприятиями. 3. РЕСУРСОСБЕРЕГАЮЩИЕ ТЕХНОЛОГИИ НА ГОРОДСКОМ ЭЛЕКТРИЧЕСКОМ ТРАНСПОРТЕ 3.1. Регенерация масел Установки для регенерации отработанных масел и схемы технологического процесса Проводимые исследования кафедрой городского электрического транспорта ( ...
0 комментариев