Навигация
3 СИНТЕЗ РЕГУЛЯТОРА
3.1 Синтез регулятора методом ЛАЧХ
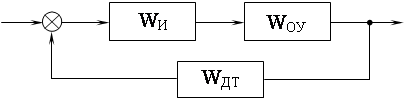
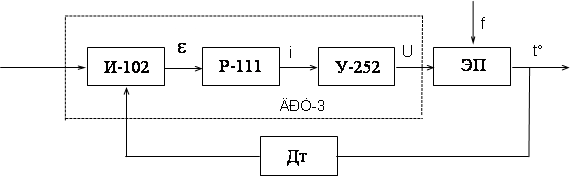
Рисунок 3.1 – Структурная схема замкнутой системы
Преобразуем структурную схему, представленную на рисунке 3.1, к структурной схеме следующего вида:

Рисунок 3.2 – Структурная схема исследуемой САУ
Найдем передаточную функцию неизменяемой части прямой цепи:
![]() (3.1)
(3.1)
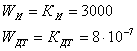
где WДТ=kД – передаточная функция датчика температуры Тд;
WИ=kИ – передаточная функция измерительного блока;
WО – передаточная функция объекта управления.
 (3.2)
(3.2)
Передаточная функция прямой цепи (неизменяемой части системы):
![]() (3.3)
(3.3)
Тогда коэффициент усиления неизменяемой части K:
![]() (3.4)
(3.4)
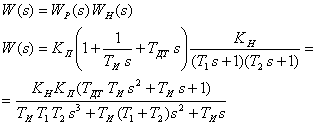
Передаточная функция неизменяемой части прямой цепи будет иметь вид:
![]() (3.5)
(3.5)
Передаточную функцию синтезируемого регулятора найдём методом логарифмических частотных характеристик. По ЛАЧХ определяются w1, w2, а также Kж, по которым находится желаемая передаточная функция прямой цепи:
![]() (3.6)
(3.6)
где T1=1/w1, T2=1/w2, T3=1/w3, Kж – находится как пересечение прямой (до w1) желаемой ЛАЧХ с осью частот.
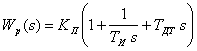
Передаточная функция регулятора:
![]() (3.7)
(3.7)
Полученная передаточная функция регулятора имеет очень сложную техническую реализацию и на практике такой регулятор не применяется. Практически реализуемые регуляторы строятся с использованием следующих допущений и приближений: объект управления достаточно инерционен и в цепях регулятора нет высокочастотных помех или они достаточно малы, то высокочастотной частью регулятора можно пренебречь и считать, что T3=0. Если потребовать чтобы T1=T2, тогда желаемая передаточная функция будет иметь вид:
![]() (3.8)
(3.8)
В этом случае для объекта второго порядка будет получен ПИД-регулятор.
3.2 Определение параметров ПИД-регулятора
Так как требования к высокочастотной части не высоки, то считаем что T3=0 и T1=T2, тогда получаем, что желаемая ЛАЧХ имеет вид приведенный выше и передаточная функция регулятора будет иметь вид:
 (3.9)
(3.9)
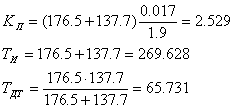
Как видно в этом случае получаем ПИД-регулятор со следующими параметрами:
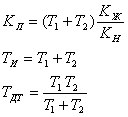 (3.10)
(3.10)
3.3 Построение переходной характеристики замкнутой системы
Передаточная функция прямой цепи:
 (3.11)
(3.11)
Передаточная функция замкнутой системы:
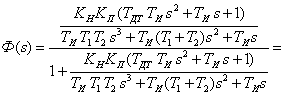
 (3.12)
(3.12)
или введя обозначения:
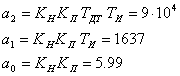
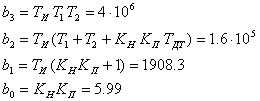 (3.13)
(3.13)
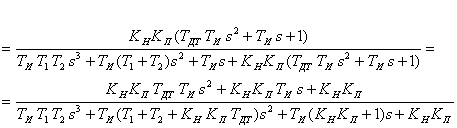
Получили передаточную функцию замкнутой системы в виде отношения двух полиномов:
![]() (3.14)
(3.14)
Для желаемой передаточной функции прямой цепи будем иметь следующую замкнутую систему:
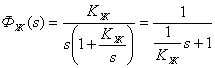 (3.15)
(3.15)
![]() (3.16)
(3.16)
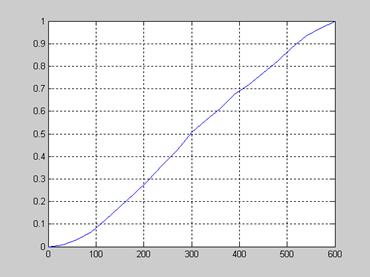
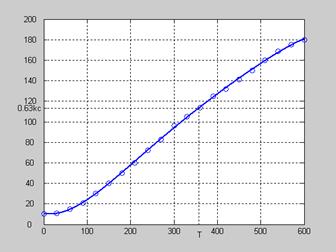
Полученный переходный процесс для объекта управления и экспериментальный переходный процесс замкнутой системы изображён на рисунке 3.3:
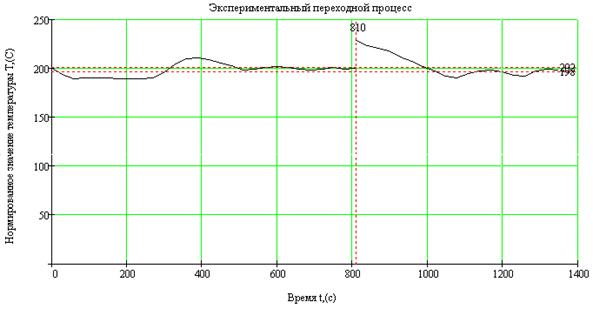
Рисунок 3.3 – Реакция замкнутой системы на единичный скачок
перерегулирование: ![]() .
.
ЗАКЛЮЧЕНИЕ
В ходе выполнения данного курсового проекта нами была изучена и исследована САР температуры жидкости в термостате на основе промышленного цифрового регулятора ТРМ-10. Был произведен расчет системы стабилизации температуры, работающей в заданном диапазоне изменения выходной переменной при заданном уровне и типе возмущений, и обеспечивающей требуемые характеристики точности и качества стабилизации. Были проведены эксперименты с системой, реализованной на учебном стенде.
По экспериментальным данным была найдена передаточная функция объекта управления в виде модели первого порядка и моделей второго порядка, найденных по упрощённому методу площадей и методу Ротача. По результатам сравнения теоретических переходных процессов с экспериментальным за окончательную модель объекта управления была принята модель, рассчитанная по упрощенному методу площадей, как модель, имеющая наименьшую оценку c2: ![]() .
.
Коэффициент усиления объекта управления был найден по статической передаточной характеристике. Исходя из требований к системе по точности и качеству, был синтезирован ПИД-регулятор с помощью метода ЛАЧХ.
В результате была синтезирована желаемая передаточная функция прямой цепи: ![]() .
.
Для которой был получен ПИД-регулятор в виде:
Для замкнутой системы с синтезированным ПИД-регулятором был построен переходный процесс, по которому было найдено время регулирования tр=520 с и перерегулирование s=5%, что соответствует требованиям задания.
ПЕРЕЧЕНЬ ССЫЛОК
1 Рей У. /Методы управления технологическими процессами./ – М.: «Мир». 1983.
2 Ротач В. Я. /Расчет динамики промышленных автоматических систем./ – М.:«Энергия». 1973.
3 Паспортные данные.
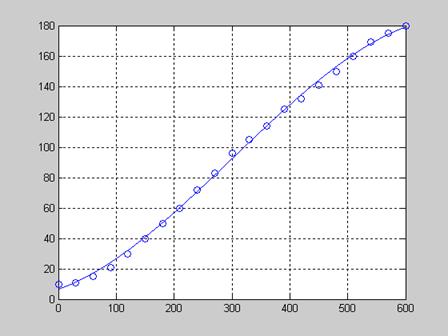
Приложение А
Результаты снятия переходного процесса объекта управления
|
|
|
|
|
| 0 | 3 | 28 | 0.04 |
| 30 | 5 | 30 | 0.11 |
| 60 | 8 | 32 | 0.17 |
| 90 | 17 | 35 | 0.22 |
| 120 | 30 | 39 | 0.45 |
| 150 | 40 | 44 | 0.66 |
| 180 | 53 | 50 | 0.93 |
| 210 | 70 | 56 | 1.23 |
| 240 | 85 | 63 | 1.58 |
| 270 | 103 | 71 | 1.96 |
| 300 | 115 | 78 | 2.37 |
| 330 | 127 | 84 | 2.67 |
| 360 | 140 | 90 | 2.93 |
| 390 | 153 | 98 | 3.10 |
| 420 | 165 | 106 | 3.16 |
| 450 | 179 | 112 | 3.22 |
| 480 | 190 | 118 | 3.26 |
| 510 | 200 | 123 | 3.32 |
Приложение Б
Результаты снятия переходного процесса замкнутой системы
|
|
|
| 0 | 200 |
| 30 | 194 |
| 60 | 190 |
| 90 | 191 |
| 120 | 191 |
| 150 | 191 |
| 180 | 190 |
| 210 | 190 |
| 240 | 190 |
| 270 | 191 |
| 300 | 196 |
| 330 | 205 |
| 360 | 210 |
| 390 | 211 |
| 420 | 209 |
| 450 | 206 |
| 480 | 203 |
| 510 | 199 |
| 540 | 200 |
| 570 | 201 |
| 600 | 202 |
|
| 201 |
|
| 200 |
|
| 199 |
|
| 200 |
|
| 201 |
|
| 200 |
|
| 229 |
|
| 224 |
|
| 221 |
|
| 218 |
|
| 212 |
|
| 208 |
|
| 202 |
|
| 198 |
|
| 192 |
|
| 191 |
|
| 195 |
Похожие работы
... Р-111. В процессе исследований необходимо получить математическую модель объекта управления в виде передаточной функции. Осуществить выбор параметров настройки регулятора, при которых система удовлетворяет заданным требованиям по точности и качеству. 1 ОПИСАНИЕ СИСТЕМЫ СТАБИЛИЗАЦИИ ТЕМПЕРАТУРЫ ЭЛЕТРОПЕЧИ ВРТ-3 Автоматическое регулирование температурного режима осуществляется системами ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
... К. Сатпаева» для просмотра и ввода информации системы оперативно-диспетчерского контроля и управления, создаваемые на Visual Basic. Специфика используемого в системе оперативно-диспетчерского контроля и управления РГП «Канал им. К. Сатпаева» ПО такая, что разработка ПО, как таковая, может производиться только при создании самой системы. Применяемое ПО является полуфабрикатом. Основная задача ...



... состава, введенным согласно закону «О городском пассажирском транспорте», договорных отношений между местными властями и транспортными предприятиями. 3. РЕСУРСОСБЕРЕГАЮЩИЕ ТЕХНОЛОГИИ НА ГОРОДСКОМ ЭЛЕКТРИЧЕСКОМ ТРАНСПОРТЕ 3.1. Регенерация масел Установки для регенерации отработанных масел и схемы технологического процесса Проводимые исследования кафедрой городского электрического транспорта ( ...
0 комментариев