Синтез и исследование непрерывной МСАР
Исследование свойств сепаратных каналов МСАР
Исследование свойств исходной МСАР (при Wk(p)=E)
Расчет последовательного компенсатора (частичный синтез автономной САР)
Синтез и исследование микропроцессорной МСАР
Переходные характеристики МСАР относительно пар «вх1-вых1» и «вх1-вых2»
Устойчивость цифровой МСАР
Навигация
Переходные характеристики МСАР относительно пар «вх1-вых1» и «вх1-вых2»
Разработка системы управления многосвязных систем автоматического регулирования исполнительного уровня
44679
знаков
2
таблицы
35
изображений
2.3 Переходные характеристики МСАР относительно пар «вх1-вых1» и «вх1-вых2»
Далее проведем сравнение переходных характеристик автономной МСАР с обратными перекрестными связями в компенсаторе и цифровой МСАР с обратными перекрестными связями в компенсаторе. Переходные характеристики автономной МСАР с прямыми перекрестными связями в компенсаторе после корректировки совпадают с переходными характеристиками автономной МСАР с обратными перекрестными связями в компенсаторе, так как и в том, и в другом случаях наблюдается абсолютная автономность.
Методом компьютерного моделирования в программном пакете VisSim получим переходные характеристики относительно пар «вх1-вых1» и «вх1-вых2» непрерывной МСАР с обратными ПС в компенсаторе. (Приложение 10)
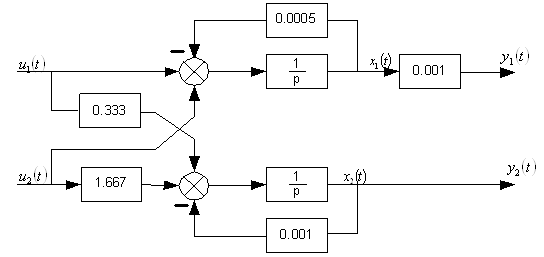
Для получения переходных характеристик цифровой МСАР проведем некоторое структурное преобразование. Рассчитаем передаточную матрицу компенсатора и включим в систему непосредственно его.
![]() ,
,

Сравним графики переходных характеристик относительно пар «вх1-вых1» для непрерывной и дискретной МСАР
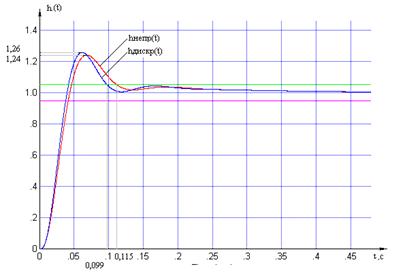
Рисунок 2.3 – Переходные характеристики относительно пар «вх1-вых1» для дискретной и непрерывной МСАР
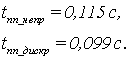
Определим время переходного процесса и перерегулирование для каждого из вариантов:
Можно отметить, что прямые показатели качества переходного процесса непрерывной МСАР лучше, несмотря на то, что время переходного процесса в данном случае у дискретной МСАР меньше, так как его определение проводилось на уровне 5%. Если увеличить требования к точности, то время переходного процесса для дискретной МСАР увеличится значительнее, нежели для непрерывной МСАР.
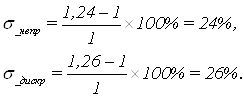
Сравним графики переходных характеристик относительно пар «вх1-вых2» для непрерывной и дискретной МСАР
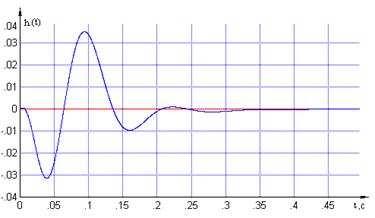
Рисунок 2.3 – Переходные характеристики относительно пар «вх1-вых2» для дискретной и непрерывной МСАР
График переходной функции дискретной МСАР относительно пары «вх. 1 – вых. 2» не совпадает с аналогичным графиком переходной функции непрерывной МСАР. Это свидетельствует о грубой автономности каналов регулирования цифровой МСАР.
Определим подбором на модели новое расчетное значение шага дискретизации ![]() , при котором свойство автономности для цифровой САР можно считать практически выполненным.
, при котором свойство автономности для цифровой САР можно считать практически выполненным.
Увеличим шаг дискретизации. Получим переходные характеристики для ![]()
![]()
![]()
![]()
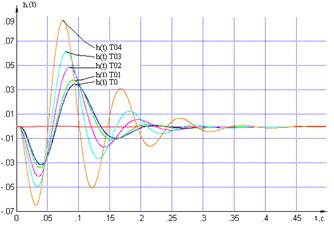
Рисунок 2.4 – Переходные характеристики относительно пар «вх1-вых2» для дискретной МСАР с различными То
Попытка увеличить шаг дискретизации приводит к увеличению максимального отклонения управляемой величины от установившегося значения и времени установления.
Уменьшим шаг дискретизации. Получим переходные характеристики для ![]()
![]()
![]()
![]()
![]() (Рисунок 2.5)
(Рисунок 2.5)
Из графиков видно, что уменьшая шаг дискретизации можно добиться уменьшения максимального отклонения управляемой величины от установившегося значения. Оптимальное значение ![]() так как в этом случае наблюдается минимальное значение hmax(t), в то же время достаточно быстро достигается установившееся значение.
так как в этом случае наблюдается минимальное значение hmax(t), в то же время достаточно быстро достигается установившееся значение.
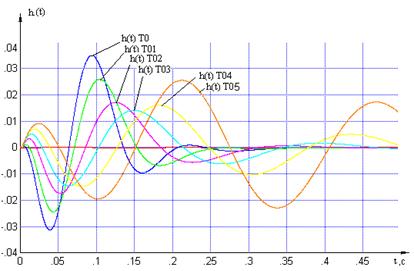
Рисунок 2.5 – Переходные характеристики относительно пар «вх1-вых2» для дискретной МСАР с различными То
Таким образом, при ![]() автономность является менее грубой, при таком значении шага дискретизации свойство автономности можно считать практически выполненным
автономность является менее грубой, при таком значении шага дискретизации свойство автономности можно считать практически выполненным
Похожие работы
... несчастных случаев. Рассмотрен вопрос о мероприятиях по защите окружающей среды. 7. Технико-экономическое обоснование проекта 7.1. Выбор и обоснование аналога В качестве аналога автоматизированной системы управления тепличным хозяйством выберем комплекс «АСУ «Теплица» ЗАО “НАНКО”, который реализует следующие основные функции: · регистрацию и отображение значений контролируемых ...
... состоит в построении системы управления; в нее входит выбор схемы управляющих устройств, элементов и их параметров, соединение автоматизированной и неавтоматизированной части, реализующих информационную технологию управления. Специфика построения систем организационного управления, где основным элементом объекта управления и управляющей части выступает управленческий персонал, рассматривается в ...

... программы и высокой точности обработки деталей); система программного управления реверсивным прокатным станом, включающая в свой контур управляющую вычислительную машину. В относительно медленных технологических процессах в химической и нефтяной промышленности распространены многосвязные САУ, осуществляющие регулирование большого количества связанных величин; так, при перегонке нефти информация о ...
... в алгоблоки; конфигурирование; установку параметров настройки; установку начальных условий; запись информации в программируемое постоянное запоминающее устройство. Сведения о процедурах технологического программирования представлены в таблице. Табл.4.1. Процедура код Выполняемые операции тестирование 00 Комплексный тест ПЗУ и ОЗУ 01-04 Тестирование микросхем ПЗУ 05-08 ...
0 комментариев