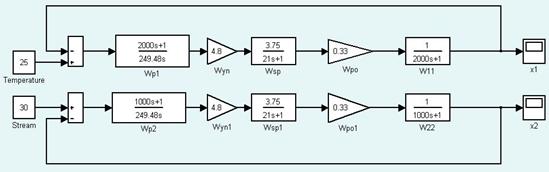
Синтез и исследование непрерывной МСАР
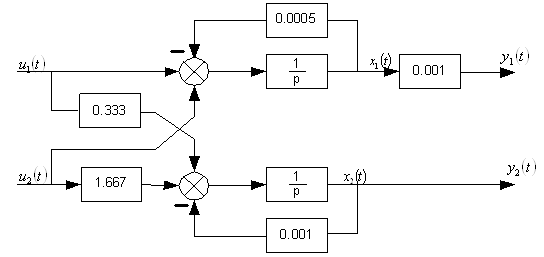
Исследование свойств сепаратных каналов МСАР
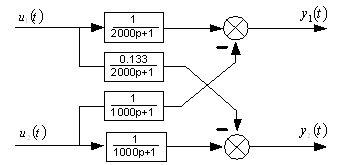
Исследование свойств исходной МСАР (при Wk(p)=E)
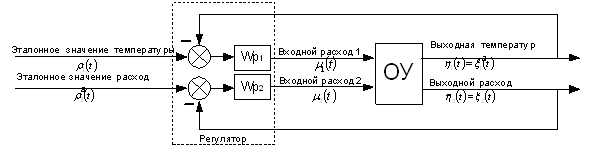
Расчет последовательного компенсатора (частичный синтез автономной САР)
Синтез и исследование микропроцессорной МСАР
Переходные характеристики МСАР относительно пар «вх1-вых1» и «вх1-вых2»
Устойчивость цифровой МСАР
Навигация
Устойчивость цифровой МСАР
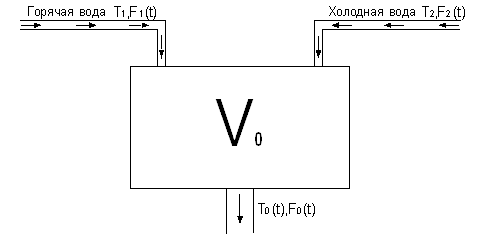
Разработка системы управления многосвязных систем автоматического регулирования исполнительного уровня
44679
знаков
2
таблицы
35
изображений
2.4 Устойчивость цифровой МСАР
Запишем передаточную матрицу приведенной непрерывной части:
 ,
,
 . (2.1)
. (2.1)
Запишем частотную передаточную матрицу ДЗ ПНЧ:
 , (2.2)
, (2.2)
где ![]() , здесь
, здесь  частота дискретизации.
частота дискретизации.
Определим значение частоты дискретизации:
![]()
Получим передаточную матрицу цифрового корректирующего устройства по методу трапеций подстановкой ![]() :
:
![]() (2.3)
(2.3)
Частотно-передаточная матрица разомкнутой системы запишется в виде
![]()
Определитель матрицы возвратных разностей:
![]()
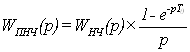
Построим обобщенный годограф Найквиста с помощью MathCAD.
а) б)
Рисунок 2.6 – Обобщенный годограф Найквиста цифровой МСАР
а) общий вид годографа Найквиста
б) построение годографа в области высоких частот;
Разомкнутая система не имеет правых корней характеристического уравнения, поэтому для устойчивости замкнутой МСАР необходимо и достаточно, чтобы обобщенный годограф Найквиста, дополненный на участке разрыва дугой бесконечно большого радиуса, не охватывал точку с координатами (0; j0). Так как обобщенный годограф Найквиста, дополненный на участке разрыва дугой бесконечно большого радиуса, не охватывает точку с координатами (0; j0), то цифровая МСАР при ![]() является устойчивой.
является устойчивой.
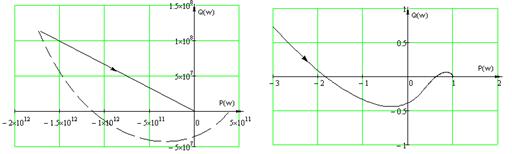
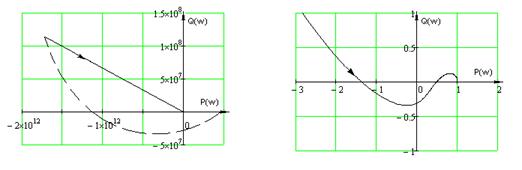
Проверим устойчивость цифровой МСАР с помощью обобщенного критерия Найквиста при увеличенном в три раза расчетном значении ![]() :
:
![]()
Передаточную матрицу приведенной непрерывной части, частотную передаточную матрицу ДЗ ПНЧ, дискретную передаточную матрицу цифрового корректирующего устройства определим по формулам (2.1) – (2.3).
Построим годограф Найквиста с помощью программного пакета MathCAD.
а) б)
Рисунок 2.7 – Обобщенный годограф Найквиста цифровой МСАР
а) общий вид годографа Найквиста
б) построение годографа в области высоких частот;
Разомкнутая система не имеет правых корней характеристического уравнения, поэтому для устойчивости замкнутой МСАР необходимо и достаточно, чтобы обобщенный годограф Найквиста, дополненный на участке разрыва дугой бесконечно большого радиуса, не охватывал точку с координатами (0; j0). Так как обобщенный годограф Найквиста, дополненный на участке разрыва дугой бесконечно большого радиуса, не охватывает точку с координатами (0; j0) (см. рисунок 2.17 б)), то цифровая МСАР при ![]() является устойчивой, но запасы устойчивости системы уменьшаются (обобщенный годограф Найквиста при
является устойчивой, но запасы устойчивости системы уменьшаются (обобщенный годограф Найквиста при ![]() пересекает координатные оси плоскости ближе к точке (0; j0), чем при
пересекает координатные оси плоскости ближе к точке (0; j0), чем при ![]() ).
).
2.5 Реакция цифровой МСАР на гармоническое воздействие
Получим реакцию цифровой МСАР по первому каналу на гармоническое воздействие с частотой w1=9.9 и сравним ее с аналогичной реакцией первого сепаратного канала.
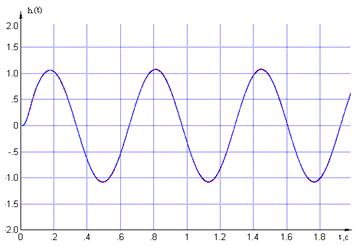
Рисунок – Реакция цифровой МСАР по первому каналу и первого сепаратного канала на гармоническое воздействие с частотой w1=9.9.
Сравним амплитуды колебаний выходного сигнала первого канала цифровой МСАР и первого сепаратного канала:
![]()
![]()
Таким образом, можно сделать вывод о достаточно высокой точности МСАР, так как реакции цифровой МСАР по первому каналу на гармоническое воздействие практически совпадает с реакцией на аналогичное воздействие первого сепаратного канала, амплитуды колебаний выходных сигналов различаются незначительно.
Библиографический список
1. СТО ЮУрГУ 04–2008 Стандарт организации. Курсовое и дипломное проектирование. Общие требования к содержанию и оформлению / составители: Т.И. Парубочная, Н.В. Сырейщикова, В.И. Гузеев, Л.В. Винокурова. – Челябинск: Изд-во ЮУрГУ, 2008, – 56 с.
2. Автоматизированное проектирование систем автоматического управления /.А. Алексанкин, А.Е. Бржозовский, В.А. Жданов и др.; под ред. В.В. Солодовнива. – М.: Машиностроение, 1990. – 335 с.
3. Автоматизированное управление технологическими процессами: учебное пособие / Н.С. Зотов, О.В. Назаров, Б.В. Петелин, В.Б. Яковлев; под ред. В.Б. Яковлева. – Л.: Изд-во ЛГУ, 1988. – 224 с.
4. Александров, А.Г. Синтез регуляторов многомерных систем/ А.Г. Александров. – М.: Машиностроение, 1986. – 272 с.
5. Баранчук, Е.И. Взаимосвязанные и многоконтурные регулируемые системы Баранчук. – Л.: Энергия, 1968. – 267 с.
6. Барковский, В.В. Методы синтеза систем управления/ В.В. Барковский, Н., Захаров, А.С. Шаталов. – М.: Машиностроение, 1969. – 325 с.
7. Бусленко, Н.П. Лекции по теории сложных систем / Н.П. Бусленко и др. – М.: Сов. радио, 1973.
8. Васильев, В.Н. Многоуровневое управление динамическими объектами / Васильев и др. – М.: Наука, 1987.
9. Воронов, А.А. Введение в динамику сложных систем управления / – М.: Наука, 1985.
10. Зырянов, Г.В. Системы управления многосвязными объектами: учебное пособие / Г.В. Зырянов. – Челябинск: Издательский центр ЮУрГУ, 2010.
11. Катковник, В.Я. Многомерные дискретные системы управления / В.Я. Катковник, Р.А. Полуэктов. – М.: Наука, 1966. – 416 с.
12. Морозовский, В.Т. Многосвязные системы автоматического регулирования/ В.Т. Морозовский. – М.: Энергия, 1970. – 288 с.
13. Острем, К. Введение в стохастическую теорию управления/ К. Острем. – М.: Мир, 1973. – 320 с.
14. Рэй, У. Методы управления технологическими процессами / У. Рэй. – М.: 1983.
15. Соболев, О.С. Методы исследования линейных многосвязных систем – М.: Энергоатомиздат, 1985. – 464 с.
16. Чинаев, П.И. Методы анализа и синтеза многомерных автоматических систем / П.И. Чинаев. – Киев: Техника, 1969. – 377 с.
17. Янушевский, Р.Т. Теория линейных оптимальных многосвязных систем управления / Р.Т. Янушевский. – М.: Наука, 1973. – 464 с.
18. Зырянов, Г.В. Линейные дискретные системы управления / Г.В. Зырянов. – Минск: Изд-во ЮУрГУ, 2005. – 109 с.
Похожие работы
... несчастных случаев. Рассмотрен вопрос о мероприятиях по защите окружающей среды. 7. Технико-экономическое обоснование проекта 7.1. Выбор и обоснование аналога В качестве аналога автоматизированной системы управления тепличным хозяйством выберем комплекс «АСУ «Теплица» ЗАО “НАНКО”, который реализует следующие основные функции: · регистрацию и отображение значений контролируемых ...
... состоит в построении системы управления; в нее входит выбор схемы управляющих устройств, элементов и их параметров, соединение автоматизированной и неавтоматизированной части, реализующих информационную технологию управления. Специфика построения систем организационного управления, где основным элементом объекта управления и управляющей части выступает управленческий персонал, рассматривается в ...

... программы и высокой точности обработки деталей); система программного управления реверсивным прокатным станом, включающая в свой контур управляющую вычислительную машину. В относительно медленных технологических процессах в химической и нефтяной промышленности распространены многосвязные САУ, осуществляющие регулирование большого количества связанных величин; так, при перегонке нефти информация о ...
... в алгоблоки; конфигурирование; установку параметров настройки; установку начальных условий; запись информации в программируемое постоянное запоминающее устройство. Сведения о процедурах технологического программирования представлены в таблице. Табл.4.1. Процедура код Выполняемые операции тестирование 00 Комплексный тест ПЗУ и ОЗУ 01-04 Тестирование микросхем ПЗУ 05-08 ...
0 комментариев