Вирощування кристалів
Літографія
Загальні принципи побудови
Структура та принцип дії акселерометра фірми Analog Devices типу ADXL
Особливості монтажу
Обґрунтування системи параметрів виробу і визначення відносних показників якості
Визначення коефіцієнтів вагомості параметрів
Планування виконання науково-дослідних та дослідно-конструкторських робіт
Кошторис витрат на науково-дослідні та дослідно-конструкторські роботи
Витрати на оплату праці
Відрахування на соціальні заходи
Навигация
Мікромеханічний акселерометр на рухомому об’єкті
Мікромеханічний акселерометр на рухомому об’єкті
73015
знаков
28
таблиц
34
изображения
Вступ
В двадцятому столітті, коли розвиток техніки має надзвичайно високі темпи, з’явилась велика кількість технічних засобів, які дали поштовх до розвитку нових галузей промисловості, котрі змогли б мініатюризувати та покращити існуючу техніку. На сьогоднішній день можна сказати, що перспективним є розробка приладів, котрі мали б малу масу, не великі габарити, але хороші технічні характеристики, малу собівартість, високу надійність.
Мініатюризація навігаційних систем вимагає створення малогабаритних гіроскопічних датчиків. Пошук нових можливостей створення інерційних датчиків з необхідними характеристиками й прогрес в області мікроелектроніки привели до появи нового класу приладів - мікромеханічних акселерометрів (ММА). Поява мікромеханічних пристроїв, побудованих звикористанням MEMS- технологій (MEMS – Micro Electromechanical Systems) ознаменувала революційні зміни в інерційній технології. В теперешній час питанню створення й використання ММА присвячена все більша увага розробників і споживачів малогабаритних датчиків параметрів руху.
Сучасні ММА значно поступаються по точності традиційним електромеханічним акселерометрам, але вони є кращими за масогабаритними характеристиками, показниками собівартості й енергоспоживання. Розроблені зразки ММА характеризуються надмалою масою (частки грамів) і габаритами (одиниці міліметрів), низькою собівартістю (десятки доларів на одну вісь вимірювання) і енергоспоживанням, високою стійкістю до механічних (ударні впливи до 105 g) і теплових впливів (від - 40°С до +85°С) і достатньою точністю.
Провідне положення в розробці ММА займає Draper Laboratory (США), що досліджує можливість створення мікромеханічних датчиків з початку 80-х років минулого століття. Різні технічні рішення в області розробок мікромеханічних інерційних датчиків отримані й запатентовані рядом закордонних фірм (Rockwell International, Systron Donner, Analog Devices, Sagem, Murata й ін.).
Істотне зниження масогабаритних, вартісних й енергетичних характеристик відкриває нові шляхи використання ММА в цивільній і військовій областях, де раніше їхнє застосування було неможливо через масогабаритні обмеження або стримувалося через економічні міркування. Найбільш привабливим для розробників є потенційний ринок комерційного цивільного використання датчиків, що на порядки перевищує обсяги можливого ринку військової техніки. Серед можливих областей застосування ММА в якості датчиків параметрів руху можна назвати наступні:
1. Автомобільна промисловість. Індустрія автомобільної промисловості є основним «двигуном» швидкого розвитку ринку ММА. У сучасних автомобілях використаються 50-85 датчиків для створення різних систем безпеки й навігації. Прогнозується, що число датчиків протягом найближчих років буде подвоєно і всі останні моделі автомобілів таких, як Cadillac, Mercedes, BMW й Volkswagen будуть забезпечуватися системами навігації й динамічного контролю безпеки.
2. Навігаційне устаткування й військова техніка. Досягнення в області створення безкарданових інерційних навігаційних систем (БІНС) і комплексування із глобальними супутниковими навігаційними системами (GPS і ГЛОНАСС) дозволяють застосовувати ММА для широкого класу завдань навігації й керування рухом. Завдяки своїм унікальним властивостям ММА знаходять застосування в системах озброєнь і військової техніки, можуть бути успішно використані для стабілізації супутникових антен, керування безпілотними літальними апаратами й іншою апаратурою рухомих об'єктів.
3. Робототехніка. Серед можливих застосувань - задачі навігації мобільних роботів, керування маніпуляторами різного призначення, автоматизація заводського устаткування.
4. Медицина. Мікрогіроскопи можуть бути використані для стабілізації мікроінструментів, у медичній електроніці й діагностичній апаратурі.
5. 5 .Товари широкого вжитку. ММА можуть знайти застосування для стабілізації зображення відеокамер, для створення систем індивідуальної навігації, у нових розробках віртуальних комп'ютерних ігор і спортивного спорядження.
Широке застосування ММА та зростання потреби в них стимулюють подальший розвиток данного типу інерційних датчиків. Вдосконалюються їх характеристики, розширюється сфера застосування.
Метою даного проєкту є аналіз теоритичних основ та практичних застосувань сучасних мікромеханічних акселерометрів.
1.Огляд літературних джерел за темою дослідження
Сучасний науково-технічний прогрес в багатьох випадках тісно пов’язаний із застосуванням нових датчиків та приладів. Як вже було зазначено раніше, міромеханічні акселерометри знаходять своє застосування в різноманітних галузях промисловості, особливо в тих, котрі потребують мімізувати габаритні розміри та мінімальні затрати. Наприклад, в автомобілебудуванні вони використовуються в першу чергу для забезпечення безпеки водія та пасажирів. Іноземне слово «акселератор» відомо давно. Зазвичай - це педаль газу, при натисканні якої водій заставляє автомобіль рухатись швидше, тобто з прискоренням. А виміряти прискорення дозволяє такий прилад, як акселерометр. В машинобудуванні цей прилад з’явився зовсім недавно, а в ракетах, підводних човнах, літаках, акселерометри є чутливими елементами систем автоматичного керування рухом [1].
Розглянемо наведені в літературних джерелах основні характерні особливості акселерометрів. В основі конструкції акселерометра – грузик (інертна маса), який змінює своє положення в корпусі на пружині (або іншому пружному елементі), реагуючи на силу інерції, при виникненні прискорення або різкому зменшенні швидкості руху машини. Чим більше прискорення, тим більше відхилення грузика. Коли сила інерції врівноважується силою пружини, величина його зміщення від нейтрального положення свідчить про прискорення, реєструється будь-яким датчиком переміщення і перетворюється в електричний сигнал на виході приладу. Цей сигнал потім передається в бортовий комп’ютер [1]. Конструкція приладу така, що акселерометр реагує на ту складову, яка співпадає з напрямком переміщення грузика, так званою віссю чутливості. Найпростіші акселерометри мають одну таку вісь, але є із двома та трьома. Особливостями акселерометра є також те, що він реагує на силу земного тяжіння. В одному випадку це заважає, а в іншому навпаки допомагає. Наприклад, якщо автомобіль знаходиться на схилі то акселерометр вимірює проекцію прискорення сили тяжіння g на свою вісь чутливості –(![]() ), що дозволяє виміряти нахил авто.
), що дозволяє виміряти нахил авто.
В роботі [2] наведено опис конструкції та принцип функціонування акселерометра на рухомому об’єкті. Нехай на автомобілі, який рухається по рівнинній місцевості, встановлений двоосний акселерометр вимірювальні осі якого встановлені в горизонтальній площині: X- по осі автомобіля,Y- перпендикулярно їй, тобто: X – вісь лінійного прискорення, а Y- вісь кутового прискорення, яке з”явилось внаслідок кручення (повороту). Якщо проінтегрувати вимірюване прискорення, а також якщо відомо початкове місце знаходження об’єкта і вектор початкової лінійної швидкості, то можна знайти місце знаходження об’єкта на даний момент. При русі по горизонталій площині датчик не буде реагувати на прискорення тяжіння, але при підьомі та на спуску, тобто при продольному та боковому кренах, виміряне прискорення руху буде додаватися до складових прискорення тяжіння ![]() та
та![]() , де
, де ![]() - відповідні кути нахилу по осям (X,Y). При цьому датчик буде розрізняти додатні та від’ємні кути нахилу, з цього випливає, що датчик буде вимірювати тільки крен при відсутності прискореного руху або взагалі при відсутності руху. Таким чином датчик можна використовувати в автомобілі для забезпечення зпрацьовування захисних засобів при різкому гальмуванні.
- відповідні кути нахилу по осям (X,Y). При цьому датчик буде розрізняти додатні та від’ємні кути нахилу, з цього випливає, що датчик буде вимірювати тільки крен при відсутності прискореного руху або взагалі при відсутності руху. Таким чином датчик можна використовувати в автомобілі для забезпечення зпрацьовування захисних засобів при різкому гальмуванні.
Розглянемо зображену на рис.1 схему чутливого елемента двоосного акселерометра ADXL202 ADXL210 фірми Analog Devices.
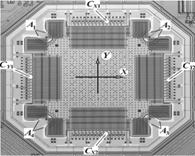
Рис.1. Схема чутливого елемента двоосного акселерометра ADXL202
Його основа складається з прямокутної пластини, яка має масу ![]() і яка встановлена на полісіліконових ресорних підвісах
і яка встановлена на полісіліконових ресорних підвісах ![]() -
- ![]() розташованих по кутам пластини. Підвіс показаний в збільшеному вигляді на рис.2.
розташованих по кутам пластини. Підвіс показаний в збільшеному вигляді на рис.2.
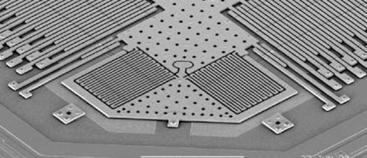
Рис.2. Ресорний підвіс акселерометра ADXL202
Пластина може рухатись у своїй площині під дією сил інерції та тяжіння (по осям X, Y). Величина зміщення визначається прикладеною силою, врівноваженою силою пружності, яка виникає завдяки деформації підвісок та пропорційна цьому зміщенню.
По бокам пластини розміщені дифереціальні конденсатори ![]() ,
, ![]() ,
, ![]() ,
, ![]() , рухомі частини (пальці) котрих механічно є одним цілим з пластиною. Кожен рухомий палець охоплениний двома нерухомими, разом вони утворюють диференційний конденсатор, який складається з двох секцій. При зміщенні рухомої частини ємність одного конденсатора збільшується, а іншого - зменшується. Розбаланс ємностей зумовлений рухом пластини та використовується в електричній частині датчика для використання у якості вхідного сигналу. Цей сигнал пропорційний вимірювальному прискоренню. Конденсаторів є декілька з кожного боку, вони включені паралельно, в результаті чого чутливий елемент має два сумарних конденсатора -
, рухомі частини (пальці) котрих механічно є одним цілим з пластиною. Кожен рухомий палець охоплениний двома нерухомими, разом вони утворюють диференційний конденсатор, який складається з двох секцій. При зміщенні рухомої частини ємність одного конденсатора збільшується, а іншого - зменшується. Розбаланс ємностей зумовлений рухом пластини та використовується в електричній частині датчика для використання у якості вхідного сигналу. Цей сигнал пропорційний вимірювальному прискоренню. Конденсаторів є декілька з кожного боку, вони включені паралельно, в результаті чого чутливий елемент має два сумарних конденсатора - ![]() та
та ![]() . Розміри елементів конденсатора такі: довжина активної частини пальців складає 125 мкм, висота 2 мкм, зазор між рухомими та не рухомими пальцями близько 1,3 мкм. Електрична частина датчика ADXL202 ADXL210 складається з наступних пристроїв:
. Розміри елементів конденсатора такі: довжина активної частини пальців складає 125 мкм, висота 2 мкм, зазор між рухомими та не рухомими пальцями близько 1,3 мкм. Електрична частина датчика ADXL202 ADXL210 складається з наступних пристроїв:
- двохтактний високочастотний генератор, вихідна напруга якого подається в протифазі на нерухомі пальці диференційних конденсаторів(![]() ,
,![]() );
);
- демодулятори ( в кожному каналі X, Y), входи яких підключені до рухомих пальців ![]() ,
,![]() ; в демодуляторах вихідний сигнал конденсаторів, величина та фаза якого визначаються з вимірювальним прискоренням, демодулюється в порівнянні з напругою високочастотного генератора;
; в демодуляторах вихідний сигнал конденсаторів, величина та фаза якого визначаються з вимірювальним прискоренням, демодулюється в порівнянні з напругою високочастотного генератора;
- RC- фільтри на виході демодуляторів, резистори яких знаходяться в складі мікросхеми, а конденсатори, що забезпечують разом з резисторами фільтрацію вихідного сигналу демудулятора, можуть бути підключені зовні. Тобто, виводи підключення конденсаторів є виводами вихідного аналового сигналу;
- двохканальний перетворювач вихідної аналогової напруги в сигнал з широтно-імпульсною модуляцією (ШІМ). Вимірювальне прискорення пропорційне ![]() , де
, де ![]() ,
, ![]() - тривалість імпульсу,
- тривалість імпульсу, ![]() - період ШІМ- сигналу. Період може бути встановлений в межах від 0,5 до 10 мс.
- період ШІМ- сигналу. Період може бути встановлений в межах від 0,5 до 10 мс.
В інших датчиках – мікросхеми ADXL150/190/250 [2] на виході замість ШІМ- перетворювача використовують буферні підсилювачі, які дозволяють також робити підрегулювання нуля та максимального показання шкали вихідної напруги. Ця мікросхема має температурний датчик, який може бути використаний для температурної компенсації вихідної напруги датчика прискорення. Всі датчики мають канал самотестування. Використання спеціалізованих процесорів забезпечує отримання вихідних даних в цифровій формі [2].
Акселерометри застосовуються в різноманітних системах рухомих об’єктів, наприклад системах як керування, так і в системах безпеки руху автомобіля, адже безпека життя людини та комфортність руху на сьогоднішній день є головними задачами в автомобілебудуванні.
На рис.3 показано застосування інерціальних датчиків в автомобільних системах [4].
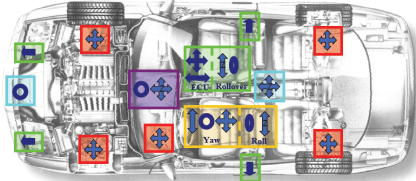
Рис.3. Приклад застосування інерціальних датчиків в автомобілі
Зеленим кольором на рис.3 показано акселерометри, які реагують на зіткнення автомобіля. Для цього використовується датчики типу: ADXL78/193. Для визначення перевороту використовується ADXL203 та ADXL150/300. Жовтим кольором позначено використання акселерометра в динаміці керування рухом для цього також використовуються акселерометри ADXL203 та ADXL150/300.Червоним зображено керування підвіскою машини – це ADXL103/203 ADXL213. Для навігації (фіолетовий) застосовують ADXL150/401 ADXL203.
На рис. 4 зображені датчики системи безпеки, які забезпечують безпеку життя людини та комфорт. До них відносять датчики активації подушок безпеки та ременів безпеки.
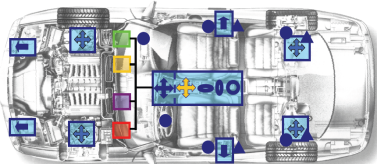
Рис.4. Датчики системи безпеки

-Додаткові датчики
-Двоосні датчики активації подушок
безпеки
-Датчик керування підвісом

- Подушки безпеки
- Датчик ременів безпеки
-Гіроскоп
Таким чином, як видно з наведених даних, сучасні акселерометри мають широке застосування в автомобілебудівній промисловості [3] для забеспечення необхідної безпеки та комфорту руху.
Розглянемо, яким чином відбувається вимірювання прискорень акселерометром, який встановлений в автомобілі.
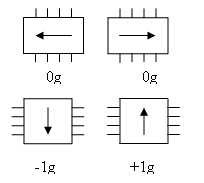
На рис.5 показано дію прискорення земного тяжіння на акселерометр.
|
Акселерометр знаходиться в статичному (нерухомому) стані, прискорення руху відсутнє, але його показання виникає завдяки силі тяжіння і залежить від місця розташування відносно Землі. Слід відмітити те, що відповідно до рис.5 проводиться не тільки вимірювання, а і калібровка акселерометра. Прискорення земного тяжіння залежить від географічної широти, із урахуванням впливу обертання Землі, знаходиться в межах від 9,78![]() ( на екваторі) до 9,834
( на екваторі) до 9,834![]() (на полюсах) при середньому значенні 9,81
(на полюсах) при середньому значенні 9,81![]() , крім того прискорення залежить від висоти над рівнем світового океану.
, крім того прискорення залежить від висоти над рівнем світового океану.
|
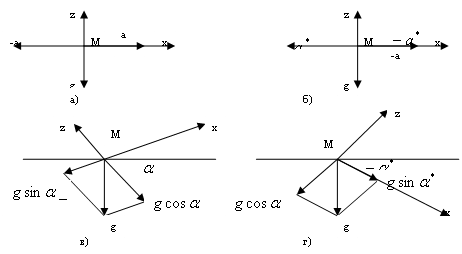
Вісь акселерометра, завдяки якій проводиться вимірювання, співпадає з продольною віссю автомобіля X. Цим же акселерометром проводиться вимірювання лінійного прискорення автомобіля. На рис. 6,а та рис. 6,б показані вектори додатного та від”ємного прискорення руху, та відповідні їм вектори прискорення сил інерції, а також вектори прискорення земного тяжіння, який розташований на осі Z. На рис. 6,в та рис. 6,г показано спосіб вимірювання продольного крену. Якщо автомобіль не рухається – показання акселерометра зумовлені тільки проекцією вектора прискорення земного тяжіння на вісь X: ![]() ,
, ![]() , де
, де ![]() та
та ![]() - додатній та від”ємний кут нахилу автомобіля. Аналогічним чином по поперечній осі Y може виконуватись вимірювання кутового прискорення та поперечного крену автомобіля [2].
- додатній та від”ємний кут нахилу автомобіля. Аналогічним чином по поперечній осі Y може виконуватись вимірювання кутового прискорення та поперечного крену автомобіля [2].
Таким чином в даному розділі на основі проведеного огляду літературних джерел розглянуті основні особливості акселерометрів, загальний принцип роботи та сфери застосування.
2.Технологічні основи виробництва мікромеханічних приладів
Похожие работы
... ї стабілізації різних рухомих об'єктів, в заспокоювача хитавиці корабля, для стабілізації літального апарату та інших, а також для визначення викривлення бурових свердловин, шахт і т.д. 3 Гіроскопи в науці В даний час деякі моделі мобільних телефонів та ігрових контролерів обладнуються датчиками прискорення, так званими акселерометра. Такі датчики дозволяють управляти цими пристроями, зді ...
0 комментариев