Вирощування кристалів
Літографія
Загальні принципи побудови
Структура та принцип дії акселерометра фірми Analog Devices типу ADXL
Особливості монтажу
Обґрунтування системи параметрів виробу і визначення відносних показників якості
Визначення коефіцієнтів вагомості параметрів
Планування виконання науково-дослідних та дослідно-конструкторських робіт
Кошторис витрат на науково-дослідні та дослідно-конструкторські роботи
Витрати на оплату праці
Відрахування на соціальні заходи
Навигация
Літографія
Мікромеханічний акселерометр на рухомому об’єкті
73015
знаков
28
таблиц
34
изображения
2.3. Літографія
В залежності від довжини хвилі застосованого випромінення застосовують наступні види літографії: фотолітографію (оптичну), електронно-променеву, рентгенівську та іонно-променеву.
Фотолітографія є основним технологічним процесом в мікроелектронному виробництві.
Для виготовлення масок використовують електронно-променеву літографію. Із-за ефекту розсіювання відбитих електронів в мікроструктурах з високою густиною мінімальна ширина лінії обмежується величиною 0,5 мкм.
Рентгенівська літографія дозволяє зменшити лінійні розміри до декількох десятків нанометрів, при цьому потрібно використовувати складну поглинаючу змазку або спеціальну тонкостінну захисну структуру. Іонно-променева літографія дозволяє проводити локальне легування домішок з дуже високою роздільною здатністю (0,01 мкм).
3.Вимірювання мікропереміщень чутливих елементів приладів
Найбільш розповсюдженими перетворювачами переміщень чутливих елементів мікромеханічних приладів є: тензорезистори та ємнісні датчики.
Розглянемо вимірювання мікропереміщень за допомогою ємнісних датчиків [5].
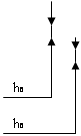
Ємнісний перетворювач працює на основі вимірювання ємності між рухомим електродом 1, який зазвичай розташований на рухомій частині акселерометра (чутливому елементі), та нерухомими електродами 2 які знаходяться на корпусі (рис. 10).
|
|
|

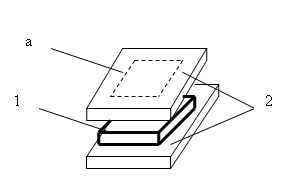
Рис.10 Ємнісний перетворювач переміщень
Ємності між відповідними парами електродів визначаються за формулами:
![]()
![]() ;
; ![]()
![]() ; (1)
; (1)
де - ![]() - діелектрична проникливість між електродами;
- діелектрична проникливість між електродами; ![]() (Ф/м);
(Ф/м); ![]() - площа взаємного перекривання електродів;
- площа взаємного перекривання електродів; ![]() - зміщення рухомого електроду;
- зміщення рухомого електроду; ![]() - початковий зазор між електродами.
- початковий зазор між електродами.
Із залежності (1) випливає, що кожний з параметрів приводить до змінення параметрів ємнісного перетворювача. Щоб запобігти впливу площі перекриття площу рухомого електроду роблять меншою, ніж площу нерухомого. Слід мати на увазі, що між кожною парою електродів є силова взаємодія, яка визначається за формулою:
![]() i=1,2 , (2)
i=1,2 , (2)
де ![]() - електричні заряди на електродах.
- електричні заряди на електродах.
Також вплив має і параметр ![]() , вплив котрого запобігається в електронній схемі. Вимірювальна схема з ємнісними перетворювачами переміщень повинна задовольняти таким умовам [1]:
, вплив котрого запобігається в електронній схемі. Вимірювальна схема з ємнісними перетворювачами переміщень повинна задовольняти таким умовам [1]:
1. Лінійність статистичної характеристики у всьому діапазоні вимірювання.
2. Відсутність впливу діелектричної проникливості середовища, яким заповнено простір між вимірювальними електродами перетворювача.
3. Достатня фільтрація вихідного сигналу від несучої частоти генератора, до якого включений ємнісний міст.
4. Виключення впливу тяжіння між рухомими і нерухомими електродами ємнісного моста.
5. Мінімальна кількість схемних елементів.
Найбільш підходящою схемою по вимогам, є схема на рис.11.
![]()
|
|
|
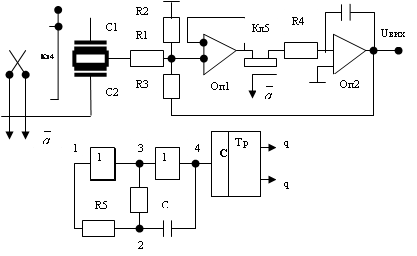
Рис.11. Принципова схема ємнісного перетворювача
Час роботи перетворювача можна розділити на два такти: перший такт підготовки, під час якого заряджається заряд вимірювальних конденсаторів від джерела опірних напруг. Ключ синхронного детектора Кл1 замкнений, а інтегратор виконує функцію аналогового запам’ятовуючого осередку [5]. Другий такт – вимірювальний, під час якого виконується перезаряд вимірювальних ємностей, ключ синхронного детектора розімкнений, що призводить до подачі сигналу на вхід інтегратора та кола зворотнього зв’язку. Два плеча ємнісного моста представляють диференційні вимірювачі ємності С1, С2, а два інших плеча- джерела опірної напруги ![]() та
та ![]() .
.
 Вихідний опір вимірювальної діагоналі ємнісно-резисторного моста є високоомним, а рівень корисного сигналу після моста недостатній для подальшої обробки [5]. В зв’язку з цим міст доповнений повторювачем заряду на операційному підсилювачі (Оп1), який одночасно виконує функцію трансформування високого опору у низький та порівняння сигналів моста та кола зворотного зв’язку. Резистори суматора зроблені однаково і мають однаковий опір (R1=R2).
Вихідний опір вимірювальної діагоналі ємнісно-резисторного моста є високоомним, а рівень корисного сигналу після моста недостатній для подальшої обробки [5]. В зв’язку з цим міст доповнений повторювачем заряду на операційному підсилювачі (Оп1), який одночасно виконує функцію трансформування високого опору у низький та порівняння сигналів моста та кола зворотного зв’язку. Резистори суматора зроблені однаково і мають однаковий опір (R1=R2).
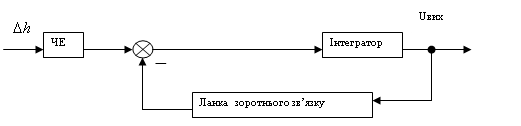
Рис.12. Структурна схема ємнісного перетворювача
Відповідно до структурної схеми (рис.12) повна передатна функція перетворювача має вигляд:
![]() (3)
(3)
де ![]() - статистичний коефіцієнт передачі перетворювача;
- статистичний коефіцієнт передачі перетворювача; ![]() - стала часу інтегратора; s –оператор Лапласа.
- стала часу інтегратора; s –оператор Лапласа.
Інтегратор виконує дві функції. По-перше - він придає порядок астатизму перетворювачу, в результаті чого температурний дрейф електронних вузлів прямого кола охоплений зворотнім зв’язком, не впливає на точність перетворення. По-друге в підготовчому такті разом із ключем синхронного детектора він виконує функцію аналогового запам’ятовуючого осередку результату перетворення на попередньому такті. При s=0 з виразу (3) одержуємо, що напруга на виході вимірювальної схеми дорівнює:
![]() . (4)
. (4)
З формули (4) випливає, що основними причинами температурної похибки вимірювального кола є нестабільність джерела опорної напруги та нестабільність зазору між електродами.
Температурну похибку можна визначити за формулою:
![]() (5)
(5)
де ![]() - температурний коефіцієнт напруги стабілізатора;
- температурний коефіцієнт напруги стабілізатора; ![]() - температурний коефіцієнт матеріалу який впливає на змінення зазору.
- температурний коефіцієнт матеріалу який впливає на змінення зазору.
Температурний коефіцієнт напруги стабілізатора приблизно на порядок перевищує величину інших похибок. В якості одного з способів підвищення точності ємнісного перетворювача є вибір стабілізатора, знак температурного коефіцієнта напруги якого не співпадає зі знаком температурного коефіцієнта змінення початкового зазору.
Для діапазону температур (-60 …+80) ![]() сумарна відносна похибка складає
сумарна відносна похибка складає ![]() % від діапазону вимірювання.
% від діапазону вимірювання.
4.Структура та принцип функціонування мікро механічних акселерометрів
Похожие работы
... ї стабілізації різних рухомих об'єктів, в заспокоювача хитавиці корабля, для стабілізації літального апарату та інших, а також для визначення викривлення бурових свердловин, шахт і т.д. 3 Гіроскопи в науці В даний час деякі моделі мобільних телефонів та ігрових контролерів обладнуються датчиками прискорення, так званими акселерометра. Такі датчики дозволяють управляти цими пристроями, зді ...
0 комментариев