Вирощування кристалів
Літографія
Загальні принципи побудови
Структура та принцип дії акселерометра фірми Analog Devices типу ADXL
Особливості монтажу
Обґрунтування системи параметрів виробу і визначення відносних показників якості
Визначення коефіцієнтів вагомості параметрів
Планування виконання науково-дослідних та дослідно-конструкторських робіт
Кошторис витрат на науково-дослідні та дослідно-конструкторські роботи
Витрати на оплату праці
Відрахування на соціальні заходи
Навигация
Структура та принцип дії акселерометра фірми Analog Devices типу ADXL
Мікромеханічний акселерометр на рухомому об’єкті
73015
знаков
28
таблиц
34
изображения
4.2. Структура та принцип дії акселерометра фірми Analog Devices типу ADXL
Фірма Analog Devices випускає серію одноосних двоосних акселерометрів ADXL для діапазону вимірювання прискорень від ![]() до
до ![]() . Частотний діапазон акселерометра (0-100) кГц.
. Частотний діапазон акселерометра (0-100) кГц.
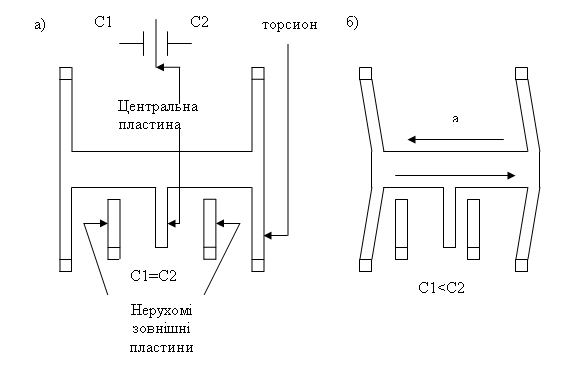 Схема кремнієвого чутливого елементу показана на рис.19,а, а його конфігурація при дії прискорення на рис.19,б [5]
Схема кремнієвого чутливого елементу показана на рис.19,а, а його конфігурація при дії прискорення на рис.19,б [5]
Рис.19. Конфігурація чутливого елемента акселерометра: а) спокій; б) при дії прискорення.
На нерухомі частини конденсатора чутливого елементу подаються протифазні прямокутні імпульси 1 МГц: амплітуди обох прямокутних імпульсів дорівнюють один одному, але зсунуті по фазі на 180. В спокої ємність двох конденсаторів рівна, тому вихідна напруга на їх електричному центрі (н центральній пластині прикріпленій до середньої балки) дорівнює 0.
Коли балка починає рухатись, то різниця ємностей приводить до появи вихідного сигналу на центральній пластині. Амплітуда сигналу буде збільшуватись із збільшенням прискорення, прикладеного до чутливого елементу.
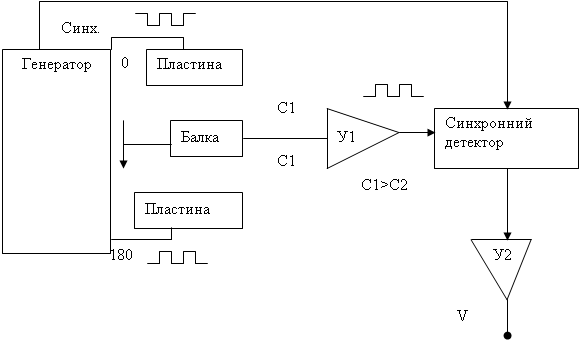
Принцип вимірювання прискорення ілюстрований блок-схемою на рис.20.
 | |||||
| |||||
Рис.20. Блок-схема акселерометра
Центральна пластина через підсилювач У1 підключена до синхронного детектора. Напрям руху балки впливає на фазу сигналу тому синхронне детектування використовується для виділення інформації про амплітуду. Вихід синхронного детектора через підсилювач У2 забезпечує вихідну напругу прискорення V.
Акселерометри цієї серії можуть найти застосування: при вимірюванні кутів нахилу в автомобільних сигнальних пристроях; при реакції на інерційні сили для захисту дисків в ноутбуках, в чутливих елементах подушок безпеки, в системах навігації автомобіля, в системах контролю ліфту, при наявності вібрації та ударів в системах керування станками та контролю вібростендів.
Розглянемо акселерометр останнього покоління – це трьоосний акселерометр фірми Analog Devices типу ADXL.
Акселерометр ADXL330 виготовляється в мініатюрному пластмасовому корпусі типу LFCSP_LQ розміром : 4*4*1.5 мм.
Розглянемо наведену на рис.21 функціональну блок-схему акселерометра ADXL330.
Блок сенсорів мікросхеми включає в себе три чутливих елементи, кожний з яких орієнтований в напрямку однієї з ортогональних осей: x, y, z . Розташування осей відносно корпусу мікросхеми показано на рис. 22. Технологічна похибка орієнтації осей сенсорів відносно просторових осей при виготовлені та установці не перевищує 0.1 градус. Наявність технологічної похибки приводить до виникнення систематичної між осевої похибки вимірювання, яка може бути повністю скомпенсована на системному рівні
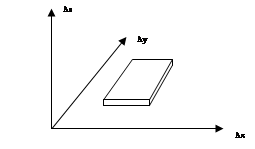
Рис. 22 Орієнтація осей відносно корпуса акселерометра
Канал формування вихідного сигналу відповідного прискорення вздовж відповідної осі складається з ємнісного сенсора, допоміжного підсилювача, демодулятора сигналу сенсора, кінцевого підсилювача і зустрічного ортогонального резистора Rfiltr з опором 32 кОм, який одночасно є елементом вихідного фільтру нижніх частот. В таблиці 1 наведені дані щодо призначення виводів мікросхеми.
Призначення виводу мікросхеми ADXL330 Таблиця 1
| Номер виводу | Призначення |
| 1,4,9,11,13,16 | Вільний (NC) |
| 2 | Само тестування (ST) |
| 3,5,6,7 | Загальний (COM) |
| 8 | Вихід каналу Z(Zout) |
| 10 | Вихід каналу Y(Yout) |
| 12 | Вихід каналу X(Xout) |
| 14,15 | Напруга живлення Vs |
Блок сенсорів прискорення мікросхеми, що містить ADXL330, представляє собою електромеханічний вузол, включаючий в себе рухому і статичну частину. Рухома частина – це мініатюрна спеціально оброблена деталь, на поверхні якої сформовані рухомі обкладки трьох диференційних конденсаторів. Рухома частина за допомогою виготовлених з полікремневих пружинок підвішена над поверхнею підложки мікросхеми, на якій сформовані статичні елементи блоку сенсорів. Застосування єдиного вузла для створення трьох датчиків прискорення дозволяє досягнути високої ортогональності взаємного розташування датчиків і, як наслідок - малого рівня міжосьових перешкод.
Пружинки системи підвісу рухомого вузла забезпечують гальванічний контакт з рухомими обкладками диференційних конденсаторів. Під дією сил інерції або земного тяжіння рухома частинам електромеханічного вузла може відхилятись у будь-якому напрямку в заданих межах. На поверхні підложки напроти обкладки кожного з диференційних конденсаторів, розташованих на рухомому вузлі, знаходяться нерухомі обкладки. Сигнал на виході кожного диференційного конденсатора залежить від величини зміщення рухомої частини конденсатора, зумовленого відхиленням рухомої частини електромеханічного вузла від нейтрального положення відносно відповідних частин на підложці. Принцип формування сигналу на виході диференційного конденсатора проілюстровано на рис. 23. Для вимірювання прискорення за допомогою ємнісного сенсора, побудованого із застосуванням диференційного конденсатора, в акселерометрах серії ADXL компанії Analog Devices використовується два частотних протифазних вимірювача сигналу U1 і U2. Сигнали представляють собою коливання типу «меандр», які формуються внутрішнім генератором вимірювальних сигналів.
Диференційний конденсатор складається з пластини П1, яка знаходиться на рухомому вузлі, і пластин П2 і П3, розташованих на підложці. Як видно з рис.23, нерухома обкладка цього конденсатора виготовлена у вигляді двох пластин, що мають однакову форму і розміри поверхні.
|
|
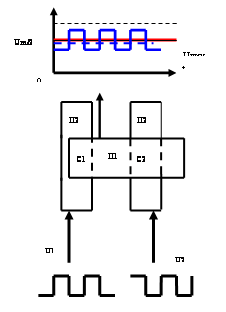
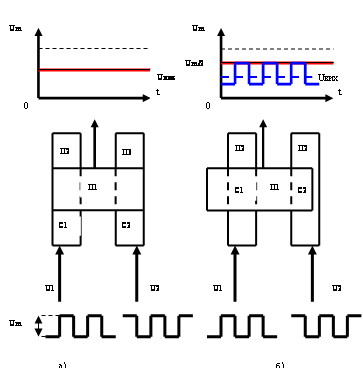
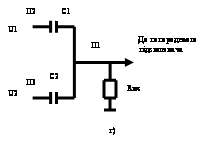
Рис .23 . Формування сигналів на виході диференційного конденсатора при нейтральному положенні рухомої обкладки а) зміщення рухомої обкладки вліво, б) зміщення рухомої обкладки вправо; в) еквівалентна схема сенсора з використанням диференційного конденсатора.
Всі елементи диференційного конденсатора виготовлені з полікремнія і є хорошими провідниками в діапазоні робочих температур. На кожній з пластин диференційного конденсатора є контакт для підводу вимірювального сигналу. При відсутності зовнішнього механічного збудження (рис. 23,а) рухома частина диференційного конденсатора П1 знаходиться в середньому положенні, парціальні ємності С1 і С2, утворені кожною пластиною нерухомої обкладки (П2,П3) і рухомою обкладкою конденсатора (П1), будуть рівні між собою [1].
Еквівалентна схема сенсора з використанням диференційного конденсатора представлена на рис. 23,г. Як видно з представленої схеми, ємності С1 та С2 утворюють ємнісний дільник напруги, до середньої точки якого підключений вхід допоміжного підсилювача з вхідним опором. Коефіцієнт передачі ємнісного дільника kn в цьому випадку дорівнює 0.5. Сигнал Umax, що знімається з рухомої частини П1, представляє собою постійну напругу Um/2 (синя лінія на рис. 23,а) оскільки в першому напівперіоді вимірювального сигналу до дільника прикладені напруги U1=0 та U2=Um, а в другому напівперіоді - навпаки U1=Um та U2=0. При зміщенні сигнальної пластини П1 вліво за рахунок дії сили інерції (рис. 23,б) С1>С2, коефіцієнт ділення kn для сигналу U1 більше за 0.5, а для сигналу U2 менше, ніж 0.5, що призводить до формування на пластині П1 напруги Uвих, яка містить постійну складову, рівну Um/2, і змінну складову, по формі співпадаючу з вимірювальним сигналом U1. Амплітуда змінної складової залежить від відношення ємностей С1 і С2.
Демодуляція сигналу з виходу допоміжного підсилювача здійснюється шляхом синхронного детектування, для чого в блок демодулятора в якості опорного подається один з вимірювальних сигналів, (рис. 21). Сигнал на виході блоку демодуляторів при використанні напруги U1 в якості опорного сигналу показаний на рис. 23 червоною лінією.
В таблиці 2 для порівняння приведені параметри декількох акселерометрів.
Параметри акселерометрів ADXL330 ADXL202/ADXL210Таблиця 2
| Параметри | умови | ADXL330 | ADXL202 | ADXL210 |
| ||
| Первічний датчик |
| ||||||
| Діапазонви мірюваних прискорень g | По всі осям по всьому діапазоні | 3.6 | 2 |
| |||
| Не лінійність % | 0.3 | 0.2 | 0.2 |
| |||
| Похибка встановлення, градус |
|
|
|
| |||
| Міжосьова похибка % |
|
|
|
| |||
| Чутливість |
| ||||||
| Скважність %/g | 250c Xfilt,Yfilt | - | 12.5 | 4 |
| ||
| Аналоговий вихід, мВ/g | 300 | 312 | 100 |
| |||
| Температурний дрейф, %/0c |
|
|
|
| |||
| Шум: |
| ||||||
| Спектральна щільність шуму 10-9g/ | X,Y |
|
| 500 | 500 |
| |
| Z | 350 | - | - |
| |||
| Частотні характеристик |
| ||||||
| Діапазон частот, кГц | X,Y | Без зовнішнього фільтру | 1.6 | 5 (аналогов.) | 5 (аналогов.) |
| |
| Z | 0.5 | - | - |
| |||
| Резонансна частота датчика, кГц | 5.5 | 10 | 14 |
| |||
| Рівень початкового зміщення вихідного сигналу |
| ||||||
| Параметри | умови | ADXL330 | ADXL202 | ADXL210 | |||
| Скважність % |
| - | 50 | 50 | |||
| Вихідна напруга, В | 1.5 | - | - | ||||
| Температурний дрейф 10-3g/0c | 1 | 2 | 2 | ||||
| Фільтр | |||||||
| Технологічний розкид величини внур. опору R, кОм |
|
|
|
| |||
| Мінімальна ємність фільтру пФ | 4700 | 1000 | 1000 | ||||
| Режим само тестування | |||||||
| зміна скважність % |
| - | +10 | +10 | |||
| Вхідна напруга «0» В | +0.6 | ||||||
| Вхідна напруга «1» В | +2.4 | ||||||
| Вихідна напруга Xout, мВ | -150 | ||||||
| Вихідна напруга Yout, мВ | +150 | ||||||
| Вихідна напруга Zout, мВ | -60 | ||||||
| Джерело живлення | |||||||
| Діапазон робочих напруг, В | 2.0-3.6 | 3.0-5.25 | 2.7-5.25 | ||||
| Діапазон струмів, мкА | 320 | 600 | 600 | ||||
| Час включення, мс |
| 1 | 160 | 160 | |||
| Діапазон робочих температур | -25…70 | 0…70 | 0…70 | ||||
Для обмеження смуги частот вихідного аналового сигналу до кожного виходу датчика необхідно підключити конденсатор, який разом з внутрішнім резистором є фільтром низьких частот (ФНЧ). Ємність конденсатора Cfit можна визначити з відношення для частоти зрізу ФНЧ:
![]() (6)
(6)
де ![]()
![]() - частота зрізу ФНЧ на рівні -3ДБ, Гц
- частота зрізу ФНЧ на рівні -3ДБ, Гц
4.3.Характеристики акселерометру ADXL330
При розробці систем керування з об’єктами, які використовують акселерометри серії ADXL, слід врахувати, що звуження смуги частот вихідного сигналу дозволяє збільшити точність вимірювання завдяки зменшенню впливу внутрішніх шумів вимірювальної системи. В системах вимірювання прискорення прийнято використовувати одиниці, які є похідними від прискорення вільного падіння ![]() .
.
Середнє квадратичне значення рівня шуму на виході мікросхеми ADXL330 визначається відношенням:
![]() (7)
(7)
де n – спектральна щільність шуму, виражена в міліонних долях прискорення вільного падіння ![]() ; BW- ширина смуги частот вихідного сигналу на рівні 3дБ; k- технологічний параметр, який для ADXL330 є рівним 1.6.
; BW- ширина смуги частот вихідного сигналу на рівні 3дБ; k- технологічний параметр, який для ADXL330 є рівним 1.6.
Середнє квадратичне і квазіпікове значення рівня шуму на виході вимірювання прискорень із застосуванням акселерометра ADXL330, розраховані для різних значень ширини смуги частот вихідного сигналу відповідно за виразами (6) і (7), приведені в таблиці 3.
Таблиця 3
Рівень шуму на виході системи вимірювання прискорень ADXL330
| Смуга частот вихідного сигналу Гц | |||||||
| 1 | 10 | 50 | 100 | 200 | 500 | ||
| Ємність конденсатора фільтру мкФ | 4.7 | 0.47 | 0.10 | 0.05 | 0.027 | 0.01 | |
| Середнє квадратичне значення шуму, | x, y | 0.35 | 1.12 | 2.50 | 3.54 | 5.01 | 7.92 |
| z | 0.44 | 1.4 | 3.13 | 4.43 | 6.25 | 9.90 | |
| Квазіпікове значення шуму (x,y) | 1.40 | 4.48 | 10.00 | 14.16 | 20.04 | 31.68 | |
Спектральна щільність шуму для вимірювальних каналів x і y мікросхеми ADXL330 однакова і складає (при напрузі живлення 3В) ![]() а для каналу z -
а для каналу z -![]() [1].
[1].
Квазіпікове значення шуму з вірогідністю 95% не перевищує 4N. При збільшенні напруги живлення рівень вихідного сигналу збільшується пропорційно цій зміні, а відносно рівня шуму зменшується, таким чином він залежить від температури нагріву електронних компонентів і залишається практично незмінним.
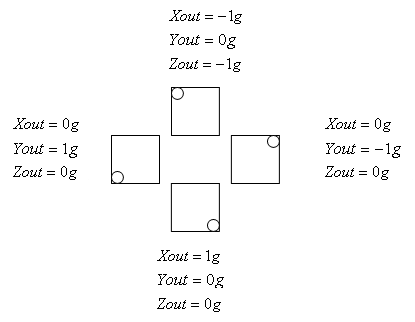
Значення вихідних сигналів ADXL330 в статичному режимі в залежності від орієнтації мікросхеми показано на рис. 24.
|
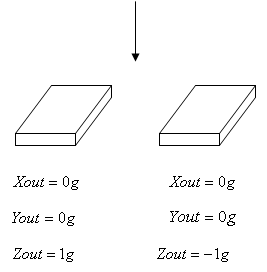 |
Рис.24. Сигнали на виході схеми ADXL330 в статичному режимі в залежності від орієнтації датчика відносно напряму сили тяжіння Землі
Похожие работы
... ї стабілізації різних рухомих об'єктів, в заспокоювача хитавиці корабля, для стабілізації літального апарату та інших, а також для визначення викривлення бурових свердловин, шахт і т.д. 3 Гіроскопи в науці В даний час деякі моделі мобільних телефонів та ігрових контролерів обладнуються датчиками прискорення, так званими акселерометра. Такі датчики дозволяють управляти цими пристроями, зді ...
0 комментариев