Сущность основных методов цифровой и аналитической фототриангуляции
Построение блочных сетей фототриангуляции методом связок
Особенности цифровой фототриангуляции
Технология построения блочной сети фототриангуляции на ЦФС «Фотомод»
Построение блочной сети фототриангуляции на ЦФС «Фотомод»
Подготовка исходных данных для построения сети и ввод параметров проекта
Внутреннее ориентирование снимков
Построение и уравнивание блочной сети фототриангуляции
Оценка точности, контроль качества и анализ результатов цифровой ПФТ
Исследование точности построения блочной сети фототриангуляции с использованием ЦФС «Фотомод»
Навигация
Сущность основных методов цифровой и аналитической фототриангуляции
Цифровая фототриангуляция для создания топографических карт
64137
знаков
10
таблиц
9
изображений
1.3 Сущность основных методов цифровой и аналитической фототриангуляции
1.3.1 Маршрутная фототриангуляция методом независимых моделей
Основные этапы построения ПФТ методом независимых моделей[2]:
1) предварительная обработка результатов измерений координат точек снимков. Осуществляется переход от отсчётов, полученных при измерении снимков на приборе, к плоским координатам точек снимков x, y и учет всех систематических ошибок в координатах точек снимков (за дисторсию объектива АФА, деформацию фотоматериала, рефракцию световых лучей и др.);
2) взаимное ориентирование снимков.
На данном этапе определяются элементы взаимного ориентирования снимков в базисной системе (![]() ).
).
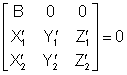
В качестве исходного уравнения используется условие компланарности соответствующих лучей в базисной системе:
 , (1.1)
, (1.1)
где ![]() - пространственные координаты точек левого и правого снимков. В уравнении (1.1) известными будут
- пространственные координаты точек левого и правого снимков. В уравнении (1.1) известными будут ![]() , неизвестными являются элементы взаимного ориентирования
, неизвестными являются элементы взаимного ориентирования ![]() .
.
![]()
![]()
![]()
![]() , (1.2)
, (1.2)
![]()
![]()
![]()
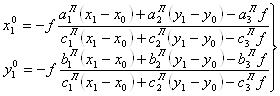
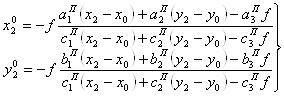
где ![]() - плоские координаты точек снимков;
- плоские координаты точек снимков;
![]() - направляющие косинусы, являющиеся функциями элементов взаимного ориентирования снимков;
- направляющие косинусы, являющиеся функциями элементов взаимного ориентирования снимков;
![]() - элементы внутреннего ориентирования снимков.
- элементы внутреннего ориентирования снимков.
На основе (1.1) получим уравнение вида
![]() (1.3)
(1.3)
Уравнение (1.3) не линейны по отношению к элементам взаимного ориентирования снимков. Их решают итерационным методом, предварирительно приведя их к линейному виду разложением в ряд Тейлора, ограничиваясь производными первого порядка малости;
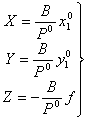
3) определение фотограмметрических координат точек одиночных моделей. Выполняется по формулам прямой фотограмметрической засечки:
![]()
 (1.4)
(1.4)
![]() , (1.5)
, (1.5)
где ![]() – трансформированные координаты точек левого снимка,
– трансформированные координаты точек левого снимка,
![]() – трансформированный продольный параллакс.
– трансформированный продольный параллакс.
 . (1.6)
. (1.6)
 . (1.7)
. (1.7)
4) подсоединение независимых моделей.
На данном этапе перевычисляются координаты точек в единую систему координат всей сети. Обычно в качестве системы координат маршрутной сети принимают фотограмметрическую систему координат первой модели маршрута. Для подсоединения моделей используются координаты связующих точек.
В качестве исходного принимается уравнение связи координат точек последующей модели с предыдущей:
 , (1.8)
, (1.8)
где ![]() - координаты точек в системе координат маршрутной модели (сети);
- координаты точек в системе координат маршрутной модели (сети); ![]() - координаты этих же точек в системе координат последующей модели;
- координаты этих же точек в системе координат последующей модели;
![]() - матрица направляющих косинусов, вычисленных через углы
- матрица направляющих косинусов, вычисленных через углы ![]() ;
;
t -масштабный коэффициент;
![]() - координаты начала системы координат последующей модели в системе координат маршрутной сети.
- координаты начала системы координат последующей модели в системе координат маршрутной сети.
Этап подсоединения модели состоит из двух процессов. Сначала вычисляются ![]() , а известными будут
, а известными будут ![]() .
.
Затем вычисляются координаты точек присоединяемой модели в системе координат маршрутной сети. Известными будут ![]() и координаты
и координаты ![]() точек модели, полученные по формулам (1.4). По формулам (1.9) вычисляются координаты
точек модели, полученные по формулам (1.4). По формулам (1.9) вычисляются координаты ![]() присоединяемой модели в системе координат маршрутной сети.
присоединяемой модели в системе координат маршрутной сети.
5) внешнее ориентирование сети.
На данном этапе перевычисляются координаты точек сети в заданную внешнюю систему координат. Необходимо минимум три опорных точки.
Для внешнего ориентирования сети используются координаты X, Y, Z опорных точек и уравнения вида:
 . (1.9)
. (1.9)
где ![]() координаты начала системы координат сети;
координаты начала системы координат сети;
![]() фотограмметрические координаты точек сети;
фотограмметрические координаты точек сети;
![]() геодезические координаты точек местности.
геодезические координаты точек местности.
В начале известны координаты опорных точек в геодезической системе и фотограмметрические координаты этих точек, полученные из уравнивания сети. В качестве неизвестных выступают 7 элементов ориентирования геодезической сети: ![]() .
.
Определив 7 этих неизвестных, будут определяться геодезические координаты ![]() всех точек сети ПФТ.
всех точек сети ПФТ.
6) исключение деформации сети.
Деформацию сети ПФТ можно описать различными полиномами.
Например, обобщённого типа:
 , (1.10)
, (1.10)
где ![]() – это коэффициенты деформации,
– это коэффициенты деформации, ![]() – геодезические координаты точек сети, полученные на этапе 5 из геодезически ориентированной сети.
– геодезические координаты точек сети, полученные на этапе 5 из геодезически ориентированной сети.
Из-за деформации сети после ее геодезического ориентирования на опорных точках будут получены расхождения координат :
![]() (1.11)
(1.11)
Исключение деформации сети состоит из 2 процессов: сначала будут известны ![]() ,
, ![]() опорных точек, неизвестными будут коэффициенты
опорных точек, неизвестными будут коэффициенты ![]() , а исходными для определения коэффициентов будут уравнения (1.10).
, а исходными для определения коэффициентов будут уравнения (1.10).
После определения коэффициентов деформации вычисляется величина разности координат ![]() характеризующие деформацию сети для всех точек сети по формулам (1.10).
характеризующие деформацию сети для всех точек сети по формулам (1.10).
Затем вычисляются исправленные координаты точек сети:
 . (1.12)
. (1.12)
0 комментариев