Сущность основных методов цифровой и аналитической фототриангуляции
Построение блочных сетей фототриангуляции методом связок
Особенности цифровой фототриангуляции
Технология построения блочной сети фототриангуляции на ЦФС «Фотомод»
Построение блочной сети фототриангуляции на ЦФС «Фотомод»
Подготовка исходных данных для построения сети и ввод параметров проекта
Внутреннее ориентирование снимков
Построение и уравнивание блочной сети фототриангуляции
Оценка точности, контроль качества и анализ результатов цифровой ПФТ
Исследование точности построения блочной сети фототриангуляции с использованием ЦФС «Фотомод»
Навигация
Особенности цифровой фототриангуляции
Цифровая фототриангуляция для создания топографических карт
64137
знаков
10
таблиц
9
изображений
1.4 Особенности цифровой фототриангуляции
Пирамиды изображений для хранения цифровых изображений.
При обработке цифровых изображений[7] при ПФТ часто возникает необходимость просмотра снимков в уменьшенном масштабе. Для этих целей в программах ПФТ посчитанные один раз изображения уменьшенного масштаба, записываются и хранятся на диске во время всего сеанса обработки в виде «пирамид изображений». В этом случае информационное поле описывается упорядоченным набором изображений, располагаемых одно над другим.
Для формирования пирамиды изображений исходный цифровой снимок разбивается на блоки (обычно 2 х 2 пикселя). Для каждого блока вычисляется среднее арифметическое значение яркости, которое и будет присвоено пикселю для данного блока на следующем уровне пирамиды. Эта процедура повторяется необходимое число раз. Каждое последующее изображение пирамиды будет иметь разрешение в 2 раза меньше предыдущего, а занимаемый объём памяти соответственно в 4 раза
Хранение пирамид изображений оправдано, так как увеличевает скорость обработки.
Тайловая структура организации данных цифровых изображений.
В качестве модели организации данных цифровых изображений[7] используется тайловая структура, которая заключается в следующем:
Исходное изображение делится на блоки (тайлы), размер которых фиксирован.
При необходимости обработки конкретного участка изображения осуществляется перемещение на данный адрес и считывается нужный файл. Эта организация данных позволяет быстро считывать с диска и отображать на экране отдельные участки изображения.
Реляционная модель организации данных.
Для обеспечения гибкости сбора данных и хранения результатов измерения координат точек снимков в современных программных продуктах используется реляционная модель данных[7].
| Таблица 1 «Сведения о точках сети» | Таблица 2 «Сведения о снимках» | |
| Номер точки | Идентификатор снимка | |
|
|
| |
| Описание точки | Другие параметры |
 X,Y,Z
X,Y,Z  Элементы внешнего ориентирования снимка
Элементы внешнего ориентирования снимка| Таблица 3 «Сведения о точках снимка» |
| Номер точки |
| Идентификатор снимка |
| Измеренные х,у |
| Другие параметры |
Таблица 1 служит для хранения номеров и координат опорных, контрольных и связующих точек (номера точек не должны повторяться).
Таблица 2 служит для хранения информации о снимках, используемых в обработке. В качестве данных выступают идентификатор снимка, элементы внешнего ориентирования, результаты внутреннего ориентирования снимка и т.п.
В таблице 3 хранятся непосредственно измеренные координаты точек снимков х,у. Каждому измерению х,у в этой таблице соответствует номер измеряемой точки и идентификатор снимка, на котором производилось измерение.
Такая организация данных позволяет однозначно сопоставить каждому измерению соответствующую точку местности (сети) и снимок, на котором выполнено измерение. Она позволяет хранить «бесконечное» число опорных, контрольных, связующих точек и результатов измерения их координат.
Алгоритмы автоматического отождествления соответственных точек снимков.
Ключевым алгоритмом автоматизации фотограмметрических измерений является поиск соответственных точек на паре снимков[7].
В соответствии с методами представления видеоинформации все множество алгоритмов отождествления можно разделить на три класса:
- алгоритмы площадного сопоставления (ABM), основанные на сравнении двумерных функций изображений;
- алгоритмы, базирующиеся на сопоставлении структурных описаний (FBM);
- алгоритмы, в основе которых лежит разложение функции изображения по некоторому базису.
Рассмотрим подробнее первую группу. Здесь в качестве примитивов (элементов описаний), участвующих при сопоставлении двух изображений служат пиксели. Точность этих алгоритмов составляет от 0,1 до 0,2 размера пикселя. Они чувствительны к изменению радиометрических и геометрических свойств изображения, требуют больших вычислительных затрат и характеризуются большой вероятностью грубой ошибки в областях расположения высотных объектов и плохих или повторяющихся структур. Примерами площадных алгоритмов являются алгоритм взаимной корреляции и метод наименьших квадратов. Критерием подобия для этих алгоритмов соответственно служат коэффициент взаимной корреляции и сумма квадратов разностей значений яркостей сопряженных участков изображений.
Mетод взаимной корреляции.
Суть метода заключается в вычислении функции взаимной корреляции, которую для дискретных функций можно записать в виде:
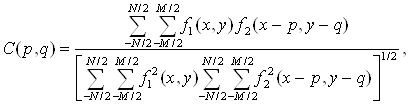 (1.23)
(1.23)
где p и q – продольный и поперечный параллаксы на изображении f2(x, y).
M и N – соответственно ширина и высота образца или пределы, в которых определена функция f1(x,y).
Функция взаимной корреляции обладает следующими свойствами:
1) ![]()
2) если f1(x,y) и f2(x-p,y-q) независимы, то C(p, q)=0;
3) C(p,q)=1 тогда и только тогда, когда существует такое число b¹0, что ![]() .
.
Фактически алгоритм отыскания соответствия между функциями f1(x,y) и f2(x-p, y-q) сводится к нахождению таких p0 и q0, при которых функция C(p, q) максимальна.
Преимущество этого метода простота реализации.
К недостаткам алгоритма взаимной корреляции относятся:
- большой объем вычислений;
- алгоритм устойчиво работает только при следующих условиях: снимаемая местность плоская, взаимные углы наклона и разворота снимков не превышают 20-30°, а разномасштабность снимков менее 20-30%.
Метод наименьших квадратовДля метода наименьших квадратов в качестве критерия подобия служит функция суммы квадратов разностей между яркостями пикселей двух изображений.
Пусть на ограниченном участке (x'[-M/2, M/2], y'[-N/2, N/2]) между функциями f1 и f2 существует зависимость:
![]() (1.24)
(1.24)
Для определения искомых величин p0 и q0 составим функцию:
![]() (1.25)
(1.25)
Данную функцию решаем под условием минимума:
![]() , (1.26)
, (1.26)
Если известны приближенные значения неизвестных параметров (![]() ), то раскладывая функцию(1.25) в ряд Тейлора и ограничиваясь величинами первого порядка малости получаем линейное уравнение относительно неизвестных Dp0 и Dq0:
), то раскладывая функцию(1.25) в ряд Тейлора и ограничиваясь величинами первого порядка малости получаем линейное уравнение относительно неизвестных Dp0 и Dq0:
 (1.27)
(1.27)
В результате приходим к системе уравнений поправок:
![]() (1.28)
(1.28)
где A – матрица коэффициентов уравнений поправок;
dX – вектор-столбец поправок к приближенным значениям неизвестных (Dp0 и Dq0);
V – вектор невязок уравнений, который характеризует величины шумовых составляющих.
От системы уравнений поправок переходим к системе нормальных уравнений:
![]() (1.29)
(1.29)
где ![]() и
и ![]() .
.
После определения Dp0 и Dq0 уточняют значения искомых параметров p0 и q0 и затем выполняют следующую итерацию. Этот процесс повторяется до получения требуемой точности вычисления неизвестных.
Алгоритм наименьших квадратов по сравнению с методом взаимной корреляции обладает рядом следующих преимуществ.
Во-первых, метод наименьших квадратов позволяет оценить точность определения искомых параметров. Для оценки точности используют среднюю квадратическую ошибку (СКО) единицы веса, которая будет характеризовать влияние шумовых составляющих и качество образца, и СКО определения параметров p0 и q0, характеризующие точность отождествления соответственно по осям x и y. Значение СКО единицы веса определяется по известной формуле:
 (1.30)
(1.30)
где n – количество уравнений поправок, а k – количество неизвестных.
СКО определения неизвестных p0 и q0 выражаются формулами:
 (1.31)
(1.31)
где ![]() и
и ![]() – соответствующие диагональные элементы обратной матрицы нормальных уравнений.
– соответствующие диагональные элементы обратной матрицы нормальных уравнений.
Во-вторых, метод наименьших квадратов позволяет вести не глобальный поиск соответственной точки, подставляя все возможные значения p и q, как в методе взаимной корреляции, а вдоль направления градиента функции.
В-третьих, как показывает практика, из всех разработанных алгоритмов отождествления метод наименьших квадратов дает наилучшие результаты в отношении точности.
В-четвертых, геометрические ограничения, накладываемые на положение и ориентацию снимков относительно плоскости объектов, несколько ослаблены при использовании метода наименьших квадратов по сравнению с методом взаимной корреляции.
К недостаткам метода наименьших квадратов следует отнести:
- алгоритм, как и все методы площадного отождествления, устойчиво работает только при незначительной разномасштабности и взаимных углах наклона и разворота снимков;
- для получения корректного решения требуется достаточно точно задать параметры p0 и q0.
Широкое распространение на практике получили следующие программные продукты цифровой фототриангуляции:
1) Softplotter фирмы Vision;
2) DPW фирмы Leica;
3) Imagine Station фирмы Intergraph;
4) Match AT – первая программа полностью автоматической ПФТ;
5) Helava Automated Triangulation System;
6) Phodis AT.
Среди российских ЦФС, в которых реализована программа цифровой ПФТ, распространение получили:
1) ЦФС Photomod фирмы Ракурс;
2) Talka, разработанная институтом проблем управления РАН;
3) ЦНИИГАиК.
Они имеют различные алгоритмы и способы реализации, высокую скорость обработки данных, удобный пользовательский интерфейс, гибкость и универсальность, возможность интерактивного режима работы оператора на всех этапах технологических процессов построения сети. По уровню автоматизации все программы ЦФТ делятся на: автоматические и полуавтоматические.
Основными технологическими процессами, которые существуют в любой программе цифровой фототриангуляции [7] являются:
1) создание проекта;
2) внутреннее ориентирование снимков;
3) измерение координат точек снимков;
4) предварительное построение сети;
5) уравнивание сети;
6) оценка точности построения сети.
0 комментариев