Навигация
РАЗРАБОТКА И ОПИСАНИЕ ПРИНЦИПИАЛЬНОЙ ЭЛЕКТРИЧЕСКОЙ СХЕМЫ КОНТУРА КОНТРОЛЯ И РЕГУЛИРОВАНИЯ
91177
знаков
2
таблицы
4
изображения
8. РАЗРАБОТКА И ОПИСАНИЕ ПРИНЦИПИАЛЬНОЙ ЭЛЕКТРИЧЕСКОЙ СХЕМЫ КОНТУРА КОНТРОЛЯ И РЕГУЛИРОВАНИЯ
В курсовом проекте мною была разработана принципиально-электрическая схема контура контроля и регулирования соотноотношения расхода топливо-воздух. В состав данного контура входят: датчик – Метран 100 -ДД, модуль ввода-вывода аналоговы S7-200, блок ручного управления БРУ-32, пускатель ПБР-2М и исполнительный механизм МЭО, задатчик РЗД-22. Приборы питаются от сети (~220В) или от собственных источников питания. Сигнал от датчика, через клеммы 3-4 выходит на модуль ввода-вывода (клеммы 2-3). Приборы соединены последовательно (в "токовую петлю") с использованием стабилитронов. Сигнал от модуля ввода-вывода (соответствующий управляющему воздействию, выработанному микроконтроллером) через клеммы 14-15 поступает на блок ручного управления (клеммы 12-15). Так же на модуль аналового входа (клеммы 6-7, 8-9) поступают сигналы от задатчика РЗД-22 (клеммы 5-7, 5-7). С блока ручного управления сигнал, соответствующий выбранному режиму управления (автомат-ручное), через конечные выключатели (клеммы МЭО 5-6 и 7-8), поступает на пускатель (клеммы 7-8). С пускателя через клеммы 3-4-5 сигнал в 220В поступает на исполнительный механизм (клеммы 1-2-3). Также в "токовую петлю", с использованием стабилитронов, соединена цепь индикации положения регулирующего органа, состоящая из МЭО (клеммы 9-10), блока ручного управления (клеммы 26-27) и модуля ввода-вывода (клеммы 4-5).
9. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ НАГРЕВА МЕТАЛЛА В МЕТОДИЧЕСКОЙ ПЕЧИ
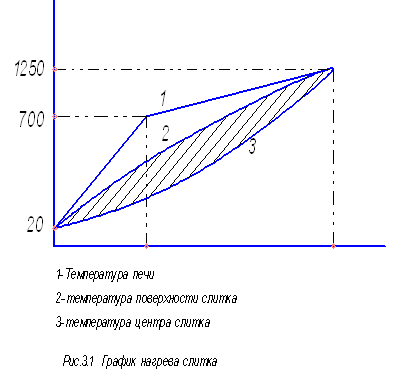
Необходимо запрограммировать на языке C++ программу, которая должна представлять собой визуализацию нагрева заготовки в печи в каждой из ее зон. Для каждой зоны рассчитываются граничные условия. Уравнение нагрева имеет вид:
 (1)
(1)
Задача сводится к определению зависимости от времени температуры Т в точках стержня, то есть функции двух переменных Т(z,x). Функция Т(z,х) должна удовлетворять уравнению теплопроводности(1) и начальному условию
Т(z,0)=f(x) (2)
и условиям на концах стержня
Е(0,х)=j1(z), u(z,t)=j2(z). (3)
Значения u(0,0) и u(L,0), полученные из (2) и (3), должны совпадать. Это будет если j1(0)=f(0), j2(0)=f(L).
Следует отметить, что путем замены переменных
z ў=![]() z
z
уравнение (1) можно преобразовать к виду
. (4)
(4)
Это означает, что решение задачи (1)-(3) путем замены переменных сводится к решению задачи (4),(2),(3).
Построим на плоскости (z,x) сетку с шагом h по переменной z и с шагом m по переменной x (xj = (j-1)m). Обозначим Tij = T(zi,tj).
Производные в уравнении (1) аппроксимируем следующим образом:
![]() ,(5)
,(5)
![]() .(6)
.(6)
Подставляя (5) и (6) в (1) при a=1, получим разностное уравнение:
 (7)
(7)
В соответствии с (2) и (3) значения
Ti0 = f(zi), T0j = j1(zj), Tnj = j2(zj)(8)
являются известными. Тогда, подставляя в (7) j=0, получим систему n-1 линейных уравнений, решив которую можно определить ui1, i=1,..,n-1.
При этом, поскольку u01=j1(t1), un1=j2(t1), известными оказываются все значения временного слоя j=1, (t=t1). Затем, подставляя в (7) j=2, решаем систему уравнений относительно ui2 и т.д. для всех j=2,..,m.
Из (7) следует, что в каждое i-тое уравнение (i=1,..,n-1) с ненулевыми коэффициентами входят только три неизвестных Ti-1,j; Tij; Ti+1,j. Величина Ti,j-1 к этому моменту является известной и потому отнесена в правую часть уравнения.
Пусть на j-том шаге заданными являются параметры Ti,j-1 (i=1,..,n-1), T0j, Tnj, l. Все неизвестные значения Tij можно разместить в массиве xi (xi=Tij, i=0,..,n). Ищем связь xi-1 с xi в виде рекуррентного соотношения
xi-1=ci-1xi+ni-1, i=1,..,n.(10)
Подставляя (10) в (7), получаем
lci-1xi-(1+2l)xi+lxi+1 = -Тi,j-1-lni-1.
Отсюда
![]() (11)
(11)
Сравнивая (11) с (10), находим рекуррентные соотношения
 ,
,
![]() , (12)
, (12)
c0= 0, n0 = T0j .
Таким образом, алгоритм определения значений Tij по известным Ti,j-1 состоит из двух этапов: прямого хода прогонки по формулам (12) при i=1,..,n-1 и обратного хода прогонки.
Похожие работы
... тепловой нагрузки. Для перехода на дистанционное управление служит блок 14 (БРУ-У), соединенный через пускатель 75 (ПРБ-74) с двигателем 16 (МЭО 25/100), перемещающим P.O. III. Теплота сгорания топлива контролируется датчиком 17 (КГ-7093.01), корректирующий импульс формируется во вторичном приборе 18 (КГ-7093.02). Коррекция задания при изменении тепловой нагрузки осуществляется с помощью блока ...
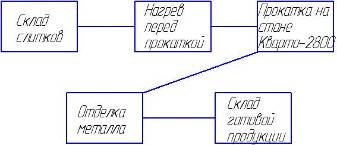
... – расходомер; 5 – датчик температуры печи. 4. Автоматизация процесса регулирования толщины полосы на толстолистовом стане кварто 2800 На листовых станах горячей прокатки в функции управляющей электронной вычислительной машины входят посадка и выдача слябов из нагревательных печей, регулирование теплового режима нагревательных печей, дистанционная перестройка черновых и чистовых клетей стана, ...
... в проведении операций компенсации входного сигнала и поэтому нашли широкое распространение для измерения, регистрации, сигнализации и автоматического регулирования температуры в металлургических агрегатах. На рисунке приведена упрощенная схема устройства автоматического потенциометра. Сигнал сравнивается с компенсирующим напряжением Uk, снимаемым с диагонали неуравновешенного измерительного ...
... площади пода печей определяют не через время нагрева, а используя величину напряжённости активного пода На. В этом случае Fа = Р/На, а длина печи La = Fa/B, где В – ширина печи. 4 Печи для термической обработки сортового проката. 4.1 Режимы термической обработки. Наиболее распространённым видом термической обработки сортового проката является отжиг с целью проведения полной фазовой ...
0 комментариев