Навигация
Кінематика центрального кривошипно-шатунного механізма
56974
знака
25
таблиц
10
изображений
2.1 Кінематика центрального кривошипно-шатунного механізма
Схема центрального КШМ подана на рис.3. Залежність між кутом повороту колінчастого вала і відповідним йому часом є такою
 , (1)
, (1)
де j – кут повороту колінчастого вала, град; t – час, що відповідає цьому куту, сек; n – число обертів колінчастого вала, об/хв.
За вихідне приймаємо таке положення КШМ, при якому поршень знаходиться у верхній мертвій точці (в.м.т.). Вводимо такі позначення: r – радіус кривошипа; l – довжина шатуна; S=2r – хід поршня; s – шлях поршня (переміщення від в.м.т.), що відповідає повороту колінчастого вала на кут j; b – кут відхилення осі шатуна від осі циліндра.
2.1.1 Шлях поршня
Визначимо залежність шляху поршня від відповідного кута повороту колінчастого вала. З рис.2 шлях поршня S рівний
S = OA – OA1
або
S = (r + l) – (r×cosj + l×cosb) = r×(1 - cosj) + l×(1 - cosb) =
= r×[(1 - cosj) + ![]() ×(1 - cosb)].
×(1 - cosb)].
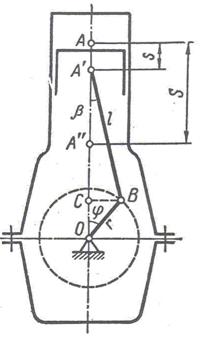
Рис.3 Схема центрального КШМ
Ввівши позначення ![]() , отримаємо
, отримаємо
S=r×[(1-cosj) + ![]() ×(1-cosb)]. (2)
×(1-cosb)]. (2)
З рис.2 слідує, що BC = r×sinj = l×sinb. Звідси sinb = ![]() ×sinj = l×sinj.
×sinj = l×sinj.
Так як ![]() то, розкладаючи праву частину цього виразу в ряд за біномом Ньютона, отримаємо
то, розкладаючи праву частину цього виразу в ряд за біномом Ньютона, отримаємо
cosb=1 - ![]() ×l2×sin2j -
×l2×sin2j - ![]() ×l4×sin4j -
×l4×sin4j - ![]() ×l6×sin6j
×l6×sin6j
В цій формулі значення членів, які включають величину l в степені вище першої, швидко зменшуються. Це дозволяє з достатньою для практики точністю обмежитися першими двома членами розкладу, тобто
cosb = 1 – 0,5×l2×sin2j. (3)
Тоді вираз для шляху поршня
S = r×(1 - cosj) + ![]() ×[1 - (1 - 0,5×l2×sin2j)] = r×(1 - cosj) + 0,5×l×r×sin2j.
×[1 - (1 - 0,5×l2×sin2j)] = r×(1 - cosj) + 0,5×l×r×sin2j.
Так як  , то S » r×(1 - cosj) +
, то S » r×(1 - cosj) + ![]() ×(1 – cos2j).
×(1 – cos2j).
Після ряду перетворень отримаємо:
S= r{(1 + ![]() ) – [cosj +
) – [cosj + ![]() cos2j]}. (4)
cos2j]}. (4)
2.1.2 Швидкість поршня
Наближену формулу для визначення швидкості поршня отримаємо, диференціюючи вираз (4) по часу:

Так як ![]() = w – кутова швидкість колінчастого вала, то
= w – кутова швидкість колінчастого вала, то
V = r×w×(sinj + 0,5×l×sin2j). (5)
2.1.3 Прискорення поршня
Формулу для визначення прискорення поршня отримаємо диферент ціюванням виразу (5) по часу
j = = r×w×cosj×
= r×w×cosj×![]() + l×r×w×cos2j×
+ l×r×w×cos2j×![]() .
.
Звідси
j = r×w2×(cosj + l×cos2j). (6)
2.2 Кінематика дезаксіального кривошипно-шатунного механізма
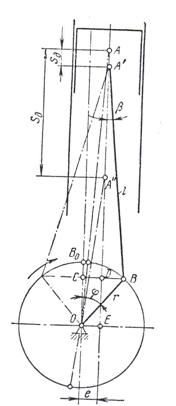
Схема дезаксіального КШМ подана на рис.4. За вихідне приймаємо таке положення КШМ, при якому кривошип займає вертикальне положення, а поршень знаходиться практично у в.м.т. Вводимо нові позначення: e – дезаксіал; k = ![]() – відносний дезаксіал. Інші позначення залишаємо такими ж, як і для центрального КШМ, тільки добавивши індекс “д” у позначеннях шляху, швидкості і прискорення.
– відносний дезаксіал. Інші позначення залишаємо такими ж, як і для центрального КШМ, тільки добавивши індекс “д” у позначеннях шляху, швидкості і прискорення.
2.2.1 Шлях поршня
З рис.4 шлях поршня Sд рівний
Sд = O1A – O1A¢,

O1A¢ = O1C + CA¢ =
r×cosj + ![]() = r×cosj + r×
= r×cosj + r× .
.
Тоді
Sд = r× - r×
- r× - r×cosj. (7)
- r×cosj. (7)
Формулу для визначення швидкості поршня отримаємо, диференцію-ючи вираз (7) по часу
Vд =  + r×sinj)×w =
+ r×sinj)×w =
= r×w×( + sinj). (8)
+ sinj). (8)
Формулу для обчислення прискорення поршня отримаємо диференцію-ванням виразу (8) по часу
jд = ![]() =
=  = r×w2 *
= r×w2 *
 (9)
(9)
0 комментариев