ОБЩАЯ ЧАСТЬ
Погрузка, транспортировка на монтажную площадку и разгрузка оборудования с указанием строповки
Разработка необходимых монтажных приспособлений
Техника безопасности при погрузочных работах и эксплуатации монтажных грузоподъемных машин и механизмов
Выбор тяговых механизмов (лебёдок)
По усилию в сбегающей ветви полиспаста подбираем электролебёдку типа Л - 3003
Навигация
Погрузка, транспортировка на монтажную площадку и разгрузка оборудования с указанием строповки
Монтаж реактора способом поворота вокруг шарнира
64444
знака
2
таблицы
4
изображения
1.2 Погрузка, транспортировка на монтажную площадку и разгрузка оборудования с указанием строповки
Наиболее сложными процессами в перевозке аппаратов являются их погрузка и разгрузка.
Многие аппараты могут быть погружены на транспорт и сняты с него с помощью выпускаемых промышленностью грузоподъемных средств, но для ряда аппаратов разработаны специальные устройства.
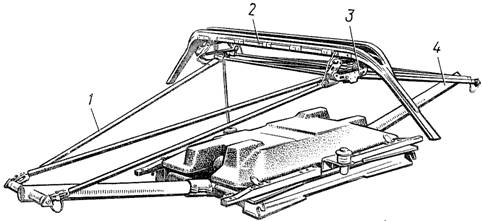
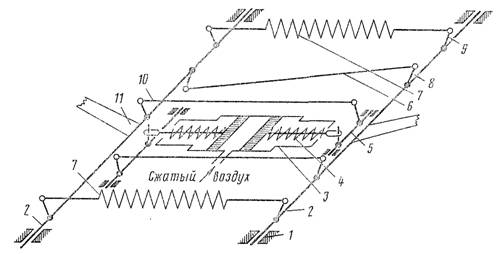
Пример погрузки аппарата на автотранспортное средство с помощью крана показан на (рис.9). После запасовки строповочного каната один конец аппарата приподнимают на высоту, позволяющую подкатить тележку с помощью тягача. После этого аппарат опускают на седловину тележки, освобождают стропы и закрепляют аппарат хомутами. Затем перемещают кран на второй конец аппарата, и операция повторяется. При таком методе погрузки можно использовать один кран, если грузоподъемность его больше 0,5 Gа или два крана, но грузоподъемность каждого должна быть больше 0,25 Gа. К недостаткам этого способа надо отнести необходимость подготовки площадки не только для транспортных средств, но и для кранов. Кроме того, требуются значительные размеры площадки для установки кранов.
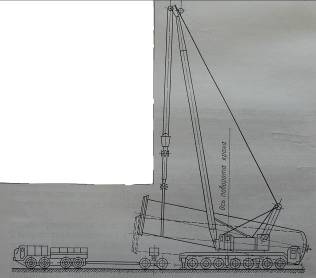
Рис.9 Схема погрузки аппаратов на автодорожный транспорт
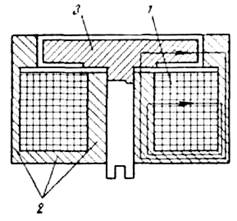
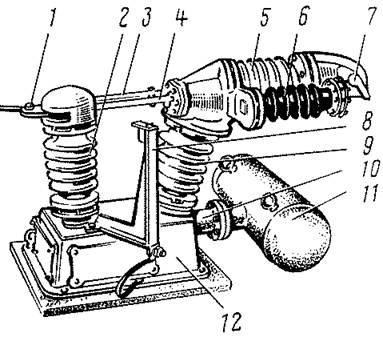
Разработан инвентарный гидравлический подъемник для погрузки и разгрузки аппаратов (рис. 10). Такой подъемник имеет вид портала, стойки которого представляют собой гидравлические домкраты. В пролете портала могут размещаться транспортные средства вместе с аппаратом. Высота портала позволяет поднимать аппарат над тележками на высоту, необходимую для подката тележек. Работает такой подъемник для погрузки следующим образом. Аппарат (1) подвешивается на стропах к порталу (2). Затем включается электродвигатель (3), приводящий в движение насос (4). Насос подает масло в гидроцилиндр (5), шток цилиндра поднимает верхнюю часть стойки, а она в свою очередь — траверсу с аппаратом. После того, как аппарат поднят на высоту, при которой можно подкатить тележки, подъем прекращают, подкатывают тележки и на них опускают аппарат. Тележки с аппаратом выкатывают из-под порталов, после чего верхнюю часть стоек вместе с порталами опускают в исходное положение, для чего устанавливают золотник гидрораспределителя в положение слива масла из цилиндра в масляной бак. Если необходимо разгрузить аппарат, то, освободив от крепления с тележками, его предварительно приподнимают, выталкивают из-под него тележки и затем опускают аппарат. Большим достоинством такого подъемника является то, что при одних и тех же стойках, меняя портал, можно менять ширину просвета, а следовательно, устанавливать его для погрузки аппаратов на железнодорожные платформы и разгрузки с них. Применение таких порталов значительно экономичнее, чем кранов большой грузоподъемности, а работа безопасней.
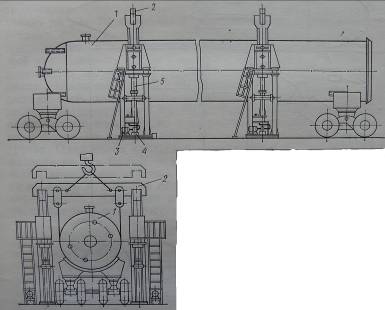
Рис.10 Схема погрузки аппарата гидравлическим подъёмником
1-аппарат; 2-портал; 3-электродвигатель; 4-насос; 5гидроцилиндр.
Процесс строповки является трудоемкой и ответственной операцией, так как узлы строповки воспринимают всю нагрузку. Узлы крепления и сам процесс строповки должны обеспечивать высокую прочность и надежность соединения. Узлы крепления должны позволять выполнять расстроповку с земли, быть простыми по конструкции, иметь наименьшее число деталей для большей надежности и меньшие трудозатраты при строповке.
Строповка с помощью захватных устройств на аппарате имеет широкое применение. Это способ строповки заключается в том, что на аппарате закрепляют штуцера, к которым в свою очередь прикрепляют строп. Если аппарат поднимают двумя кранами, то используют строповку с помощью монтажных штуцеров. Достоинством этого способа является сравнительная его простота и надежность. Недостаток способа заключается в установке на аппаратах штуцеров. Не ко всем аппаратам можно приваривать штуцера: возникают значительные напряжения на участках аппарата, где закреплены штуцера, и эти участки часто требуют усиления.
1.3 Разработка этапов подъема реактора
Различают следующие основные способы подъёма аппаратов.
По применяемому оборудованию:
стреловыми кранами;
стреловыми кранами с устройствами повышающими их грузоподъёмность;
такелажными средствами, мачтовыми подъемниками, шеврами, порталами.
По способу подъема:
подтягиванием (скольжением);
поворотом вокруг шарнира.
Краны являются основными средствами подъема аппаратов. Преимущественное применение стреловых кранов для монтажа аппаратов объясняется большой высотой подъема крюка, маневренностью, малым временем подготовки крана для начала монтажных работ, малым объемом подготовительных работ, необходимых для установки крана в рабочее положение (зачистки площадки иногда установки подстилов). Однако грузовые характеристики имеющихся кранов, т.е. изменение грузоподъемности в зависимости от вылета крюка (длины стрелы), крутопадающие. Это значит, что с увеличением длины стрелы резко падает грузоподъемность. Эта особенность ограничивает возможности монтажных кранов при большой длине аппаратов (высоте), особенно если они устанавливаются на высокие фундаменты или постаменты. Например, грузоподъемность крана СКГ-160 при длине стрелы 30 м равна 160 т, при длине стрелы 50 м она составляет только 100 т. Применение двух кранов позволяет поднимать аппараты массой вдвое большей и высотой на 30-40 % больше, чем высота подъема крюков используемых кранов. Для подъема двумя кранами необходимо балансирная траверса, обеспечивающая равномерную нагрузку на краны.
В основном краны имеют грузоподъемность от 160 до 1000 т с высотой подъема не более 50 м, что не позволяет целиком поднимать аппараты длиной более 50 м.
Монтировать эти аппараты приходится по частям. Кроме того, для переброски с одного объекта на другой кранов большой грузоподъемности требуется несколько тягачей и грузовых автомобилей. Стоимость эксплуатации таких кранов очень велика, из-за чего они рентабельны только при значительной нагрузке. Поэтому чаще всего аппараты массой более 100 т монтируют такелажными средствами. Так же, как и при монтаже кранами, основными способами подъема являются подтаскивание аппарата и поворот его вокруг шарнира. Кроме этих основных способов имеются несколько разновидностей применения мачт: так называемый способ падающего шевра, портала, безъякорного метода и способ выжимания. Однако монтаж с помощью мачт имеет свои недостатки: например необходимо монтировать и демонтировать мачты, для чего нужны краны. А тяжёлые мачты монтируют с помощью мачт меньшей грузоподъемности и высоты, которые в свою очередь монтируют кранами. Краны грузоподъёмностью 320 т и более могут перемещаться собственным ходом, мачты же приходится перевозить, а при большей их длина перед транспортированием их еще разбирают на секции. Несмотря на все перечисленные недостатки, мачтовые монтажные подъёмники являются пока наиболее более распространенным средством для монтажа аппаратов масс более 100 т.
Выбирая средство и метод для подъёма аппарата, необходимо решить следующие задачи:
какими из имеющихся устройств могут быть подняты аппараты, т.е. позволяет ли устройство поднять аппарат заданной массы и длины;
каким из возможных средств и методов наиболее рационально, с наименьшими трудозатратами и стоимостью и наибольшей безопасностью можно поднять аппарат;
на какое основание следует установить аппарат (до 28% всех аппаратовустанавливают на основания значительной высоты - более 10 м);
учитывать компоновку аппаратов на площадке
Если аппараты размещают в один ряд вдоль постамента или здания, то довольно просто подготовить площадку к монтажу и организовать её потоком. Но при этом увеличивается протяженность коммуникаций и объём монтажных работ помимо подъемов аппаратов.
В последнее время химические и нефтехимические установки проектируют таким образом, что аппараты располагаются одни от других на сравнительно небольших расстояниях по всей площадке объекта. Это приводит к значительной насыщенности площадки различным оборудованием, что усложняет размещение необходимых для подъема аппаратов грузоподъемных и такелажных средств.
В различных монтажных организациях имеется, как правило, только часть оборудования из всего возможного, поэтому в первую очередь нужно проверить и выбрать наиболее рациональный способ на основе имеющегося оборудования. При этом следует рассмотреть варианты, когда более эффективным является применение оборудования, которого нет в данном монтажном управлении или тресте, и требуется его доставить.
Экономическая и техническая эффективность монтажа тем или иным способом определяется затратами труда и средств на доставку, сборку оборудования с проектное положение, установку грузоподъемных и такелажных средств, их разборку, а также трудоемкостью способа монтажа оборудования. Следовательно, эффективность зависит от конструкции подъемных средств, их массы, грузоподъемности, необходимого числа лебедок, полиспастов, якорей, диаметров и длин стальных канатов, площади, занимаемой устройствами, и в значительной степени от сроков монтажа.
Широкое применение получил способ подъема аппаратов поворотом вокруг шарнира. Этот способ заключается в том, что на нижней части аппарата закрепляют опорный шарнир, расположенный около фундамента, таким образом, что аппарат после подъема устанавливают сразу в проектное положение на фундамент.
При таком методе подъема уменьшается необходимая грузоподъёмность кранов, так как в процессе подъема аппарат не отрывается от земли, а всё время одним концом опирается на шарнир. Конструкция шарниров может быть различна.
Преимуществами данного способа являются: значительно меньшие усилия необходимые для подъема аппарата, по сравнению с усилиями, развиваемыми при способе подъёма скольжения, где требуется отрыв от земли; существенное уменьшение усилия в грузовых полиспастах; возможность контроля за работой грузоподъёмных устройств при возникновении наибольших нагрузок, т.е. вначале
подъёма. Это позволяет избежать поломок до того, как аппарат будет полностью, поднят и создает монтажникам более безопасные условия труда.
К недостаткам способа надо отнести большие затраты труда на устройство шарнира и его установку, а также необходимость точной укладки аппарата перед подъемом. Эти сложности увеличиваются, когда аппарат нужно установить на высоком фундаменте, поэтому способ поворота пока применяется при высоте фундамента до 2 м.
Подъём оборудования в два этапа.
Если невозможен подъем аппарата кранами из исходного горизонтального сразу в нейтральное положение, т.е. при расположении центра тяжести на одной вертикали с осью поворотного шарнира аппарата, то подъем следует произвести в два этапа: вначале кронами поднять аппарат на угол 50—60, а затем тракторами или лебедкой через полиспаст дотянуть до нейтрального положения.
· Максимальная нагрузка при дотягивании аппарата возникает в момент включения дотягивающей системы; в дальнейшем по мере подъема аппарата она уменьшается.
· Места строповки следует располагать, возможно, ближе к вершине аппарата. Размещать их на верхней образующей аппарата при расстоянии от его опоры до места строповки меньшем удвоенного расстояния от опоры аппарата до его центра тяжести (К<2), не рекомендуется.
· Аппарат следует стропить либо снизу (подхватом), либо по оси.
· Для строповки вертикальных аппаратов, поднимаемых методом поворота спаренными кранами, рекомендуется применять балансирующие траверсы.
· Дотягивать аппарат необходимо (в зависимости от величины тягового усилия) одним тросом или полиспастом расположенными строго в плоскости подъема аппарата. Трос или полиспаст для дотягивания следует крепить на аппарате как можно выше таким образом, чтобы они не соприкасались с грузовыми полиспастами или стрелами кранов. Второй конец троса крепится или через отводной блок на барабане лебёдки, или за серьгу трактора. Неподвижный блок полиспаста необходимо крепить за временный инвентарный якорь, а ходовую нитку полиспаста с подвижного блока следует соединить с лебедкой или трактором. При включении дотягивающей системы необходимо внимательно следить за положением шарнира.
· В процессе подъема аппарата дотягивающую систему, (трос или полиспаст) до включения в работу следует периодически подтягивать, выбирая слабину.
· Для удерживания аппарата после прохождения нейтрального положения и плавной установки на фундамент следует применять расположенную в плоскости подъема аппарата тормозную оттяжку, натяжение которой регулируется лебедкой или трактором через полиспаст.
· Перед подходом аппарата к нейтральному положению необходимо выбрать слабину тормозной оттяжки, постепенно ее, отпуская при дальнейшем движении аппарата. После прохождения аппаратом нейтрального положения и по мере его подхода к проектному вертикальному положению необходимо следить за натяжением боковых расчалок.Для удерживания аппарата в вертикальном положении перед закреплением анкерными болтами необходимо применять две боковые расчалки, закрепленные к инвентарным якорям или тракторам.
· После проверки соответствия технологической карте расположения кранов и поднимаемого аппарата, узлов строповки аппарата и крепления на нем боковых расчалок и тормозной оттяжки, необходимо вершину аппарата приподнять кранами на 100—200 мм над опорой.
В этом положении аппарата следует проверить:
· состояние кранов и оснований под краны;
· состояние и равномерность натяжения ветвей стропов, а также состояние сжимов, соединяющих тросы стропов;
· состояние поворотного шарнира (осадку, положение оси, крепление к аппарату и фундаменту);
· расположение оси поднимаемого аппарата в плоскости подъема.
· Подъем вертикального аппарата следует осуществлять, с периодическими остановками через каждые 10—15°.
В процессе подъема и установки аппарата члены монтажной бригады и руководитель подъема обязаны следить:
1. за тем, чтобы поднимаемый аппарат и краны не соприкасались между собой или с расположенными рядом конструкциями и сооружениями;
2. за состоянием поворотного шарнира, его поворотом, а также за тем, чтобы не было просадки и смещения шарнира в плане, которые затруднят установку аппарата в проектное положение;
3. за состоянием крана и вертикальностью грузовых полиспастов, не допуская просадки, наклона крана и скручивания тросов полиспастов;
4. за состоянием якоря тягового полиспаста;
5. за равномерностью натяжения боковых расчалок аппарата и работой тягового полиспаста при установке аппарата в проектное положение;
6. за расположением оси аппарата в плоскости подъема;
7. за горизонтальностью балансирной траверсы.
О замеченных отступлениях от нормального процесса подъема следует немедленно сообщить его руководителю, который примет решение о продолжении или приостановлении подъема и о необходимости опустить аппарат в исходное положение для исправления дефектов.
Похожие работы
... контактов обеспечивается выбором их материала и конструкции при использовании одноступенчатой системы. В заключение отметим, что в настоящее время начинают широко применяться электрические аппараты с герметизированными контактами и контактами, работающими в глубоком вакууме. Жидкометаллические контакты? Наиболее характерные недостатки твердометаллических контактов следующие: 1. С ростом ...
... работы: 1. Назначение 2. Устройство 3. Принцип действия 4. Рисунок 5. Вывод Рис.1. Внешний вид Назначение На электровозах для защиты электрооборудования от токов короткого замыкания на вторичной стороне тягового трансформатора используется дифференциальная защита. Основным органом ее является блок БРД (блок реле дифференциальной защиты). При аварийном режиме ток в силовой цепи ...
... ребрами) изображают конструктивные и потоковые функциональные структуры [14]. Принципы построения функциональных структур технических объектов рассматриваются в последующих главах курса "Основы проектирования им конструирования" не включенных в настоящее пособие. Для систем управления существуют характеристики, которые можно использовать в качестве критериев для оценки структур. Одна из них - ...

... навыки у докеров. 23. СИСТЕМА ОБЕСПЕЧЕНИЯ ПЕРЕГРУЗОЧНЫХ РАБОТ ТЕХНОЛОГИЧЕСКОЙ ОСНАСТКОЙ Система обеспечения оснасткой технологических процессов портовых перегрузочных работ включает: планирование поставки и производство механизмов и приспособлений; содержание их в исправном состоянии, т. е. регистрацию, освидетельствование с испытанием, периодические осмотры, техническое обслуживание и ...
0 комментариев