Навигация
Синтез системы автоматического управления непрерывным объектом
25704
знака
6
таблиц
50
изображений
Содержание
Введение
1 Описание объекта в области z-преобразований, переменных состояний
2 Синтез непрерывного регулятора
3 Синтез компенсатора
4 Синтез дискретного регулятора
5 Синтез дискретного компенсатора
6 Формирование интегрального квадратичного критерия
7 Синтез оптимального закона управления
8 Расчёт релейного регулятора
Заключение
Введение
Задача синтеза возникает при проектировании системы автоматического регулирования. Она заключается в таком выборе структурной схемы и технических средств ее реализации, при котором обеспечиваются требуемые динамические и эксплуатационные свойства всей системы в целом.
Синтез – лишь первый этап проектирования и создания системы.
В зависимости от вида исходных данных, принимаемых при проектировании системы, к задачам синтеза можно подходить с различных точек зрения. Если имеется возможность достаточно полной свободы выбора структуры и параметров в пределах физической реализуемости и с учетом наложенных ограничений, то решается задача синтеза оптимальной системы регулирования.
Оптимальность – наилучшие свойства системы в смысле некоторого критерия оптимальности (например, наилучшее быстродействие).
Задачи синтеза систем регулирования можно разбить на две группы. В задачах первой группы задается только объект управления и требуется определить закон функционирования регулятора в целом. При этом, обычно, предполагается, что полученные при расчетах свойства регулятора могут быть технически реализованы с необходимой точностью. Задачи подобного типа возникают при синтезе систем регулирования промышленных непрерывно функционирующих объектов (химических реакторов, электростанций и пр.).
В задачах второй группы в понятие синтеза вкладывается более узкий смысл. При этом рассматриваются задачи выбора и расчета параметров специальных корректирующих устройств, обеспечивающих заданные статические и динамические характеристики системы. При этом предполагается, что основные функциональные элементы системы (исполнительные, измерительные устройства) уже выбраны в соответствии с техническим заданием и вместе с объектом регулирования представляют собой неизменяемую часть системы. Подобная задача возникает чаще всего при проектировании различного рода следящих систем.
Разработано большое число в основном приближенных методов синтеза корректирующих устройств. Наибольшее распространение получили графоаналитические методы синтеза, основанные на построении инверсных и логарифмических частотных характеристик разомкнутой системы. При этом, используются косвенные оценки качества переходного процесса: запас по модулю, запас по фазе, частота среза, колебательность – которые можно непосредственно определить по частотным характеристикам.
К другой группе относятся аналитические методы синтеза. Для них находится выражение, аналитически связывающее качества с параметрами корректирующего устройства, и определяются значения параметров, соответствующих экстремальному значению функции. К этим методам относится синтез по интегральным критериям качества переходного процесса, а также по критерию среднеквадратичной ошибки.
Задача синтеза противоположна задаче анализа. Если при анализе структура и параметры заданы, а ищут поведение системы в заданных условиях, то в данной задаче задание и цель меняются местами.
Существуют методы синтеза, при которых задается кривая переходного процесса. Но реализация систем с переходным процессом, заданным чрезмерно жестко, как правило, оказывается довольно трудной: система получается неоправданно сложной и зачастую нереализуемой. Поэтому большее распространение получил метод задания более грубых качественных оценок (таких, как перерегулирование, время регулирования, колебательность), при которых сохраняется большая свобода в выборе детальной формы кривой переходного процесса.
Динамические характеристики объектов обычно могут быть аппроксимированы некоторыми типовыми зависимостями. Это позволяет все возможное разнообразие требуемых законов свести к нескольким типовым законам регулирования, которые используются на практике. Следовательно, задача синтеза системы регулирования сводится к выбору подходящего регулятора с типовым законом регулирования и определению оптимальных значений параметров настройки выбранного регулятора.
1. Описание объекта в области z-преобразований, переменных состояний
Анализ дискретных систем существенно упрощается, если величины, описывающие поведение системы, рассматриваются в дискретные моменты времени. Поэтому непрерывная функция времени может быть заменена дискретной, значения которой определены только в дискретные моменты времени.
Для таких функций времени может быть введено понятие дискретного преобразования Лапласа:
![]()
![]()
которое называется z-преобразованием при подстановке ![]() , и связывает изображение с оригиналом.
, и связывает изображение с оригиналом.
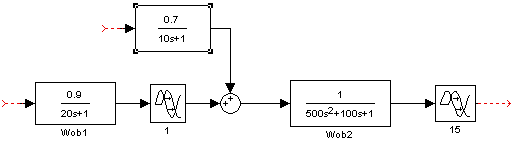
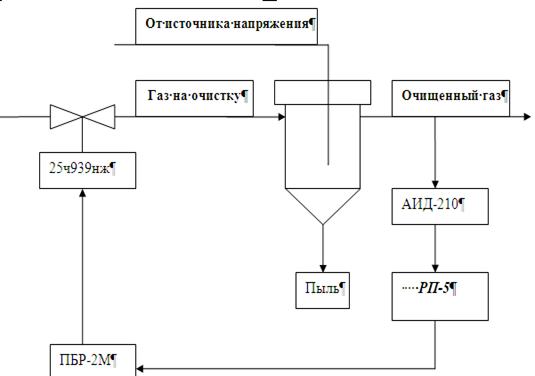
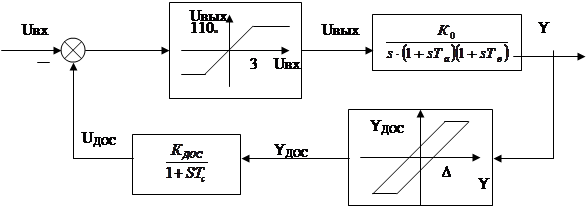
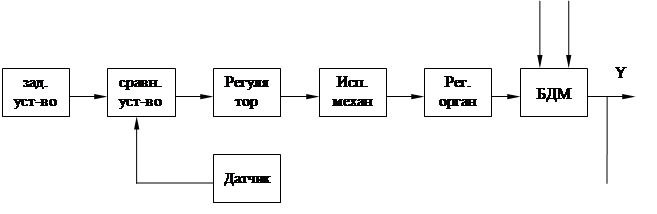
Рис. 1. Структура системы управления
Преобразование системы в дискретную область и выбор периода квантования будем проводить с помощью Matlab’а.
Чтобы обеспечить заданную погрешность аппроксимации менее 10%, нужно выбрать период квантования так, чтобы он составлял не более 10% от постоянной времени Т.
Также, при выборе преиода квантования нужно учитывать значение запаздывания. Выберем период квантования, равным 0.5.
| W1=tf([0.9],[20 1],'td',1) % задаем передаточную функцию W2=tf([1],[500 100 1],'td',15) % задаем передаточную функцию Wob=W1*W2 % общая передаточная двух последовательных частей системы T=0.5 % время квантования Wdiskr=c2d(Wob,T,'zoh') % передаточная в дискретной области |
Получим значение передаточной функции дискретной системы:
![]()
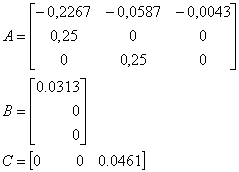
Найдем описание объекта в пространстве состояний с помощью Matlab’а.
![]()
| W1=tf([0.9],[20 1],'td',1) % задаем передаточную функцию W2=tf([1],[500 100 1],'td',15) % задаем передаточную функцию Wob=W1*W2 % общая передаточная двух последовательных частей системы [A, B, C]=ssdata(Wob) % матрицы в пространстве состояний |
Получим значения матриц:
Похожие работы
... параметры. Показателем эффективности данного процесса является степень очистки газа. Для решения задачи построена одноконтурная система управления процессом электрической очистки газа. Выбран регулятор и построена математическая модель системы управления. На модели определены оптимальные параметры регулятора. Выбраны приборы для основного контура регулирования. 1. Специальная часть ...



... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...
... устройства, которое нужно добавить к некоторой неизменяемой части системы, чтобы обеспечит требуемое качество системы в установившемся и переходном режимах. Наиболее приемлемым для решения задачи динамического синтеза является метод логарифмических амплитудных характеристик (метод ЛАХ). [1, § 12.5] Стадии синтеза по методу ЛАХ включают: 1. построение располагаемой ЛАХ, т.е. ЛАХ исходной ...
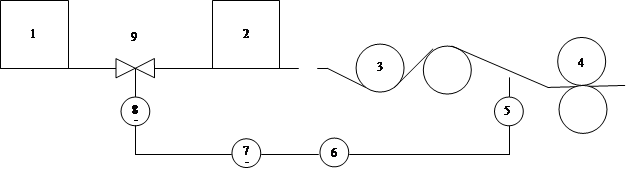

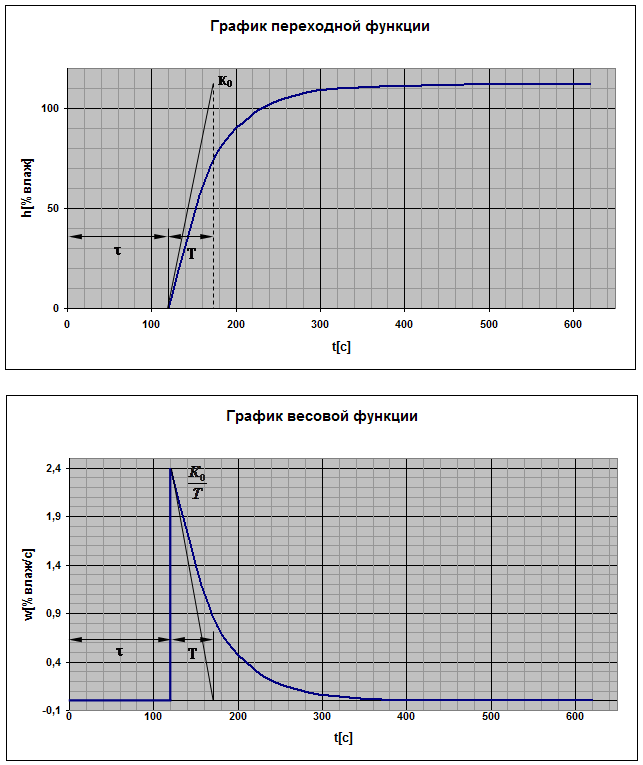
... воздействие) Δf(t) [%] - изменение концентрации массы (возмущающее воздействие) Δy(t) [г/м2] – изменение массы 1кв.м. полотна (выходная переменная) Временные характеристики по каналу управления. Передаточная функция объекта регулирования. Wоб(р) = К0 - коэффициент передачи - постоянная времени Т =50 с - запаздывание информации t =120 ...
0 комментариев