Навигация
Расчёт релейного регулятора
25704
знака
6
таблиц
50
изображений
8. Расчёт релейного регулятора
Реальные автоматические системы требуют при рассмотрении учитывать всякого рода нелинейности. Для элементов, содержащих нелинейности, не выполняется принцип суперпозиции. Это, в свою очередь, ограничивает возможность применения преобразования Лапласа и Фурье.
Нелинейная система – система, содержащая хотя бы одно нелинейное звено, т. е. описываемое нелинейным уравнением. Особые свойства нелинейных систем широко используются в технике. На этих свойствах основано генерирование электромагнитных колебаний, выпрямление переменного тока, умножение и деление частот. По динамическим качествам нелинейные автоматические системы во многих случаях превосходят линейные системы.
Простейшим видом нелинейных корректирующих звеньев являются корректирующие звенья с нелинейной статической характеристикой.
Если пользоваться частотным описанием таких нелинейных динамических корректирующих звеньев (на основе гармонической линеаризации), то их назначение можно определить следующим образом. Во-первых, они применяются для получения определенной желаемой зависимости частотных характеристик от амплитуды сигнала и тем самым для получения различной реакции системы на воздействие разной величины или, наоборот, для устранения нежелательных таких зависимостей, обусловленных имеющимися в системе нелинейностями основных звеньев. Во-вторых, такие корректирующие звенья применяются для преодоления той жесткой зависимости между амплитудной и фазовой частотными характеристиками, которая существует в линейных системах, с целью независимой корректировки каждой из этих характеристик.
Расчет системы с учётом нелинейного элемента:
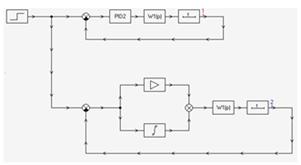
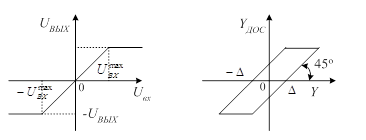
Заменим в системе ПИ-регулятор на нелинейный элемент. В качестве нелинейного элемента возьмём идеальное реле, статическая характеристика звена изображена на рисунке 23.
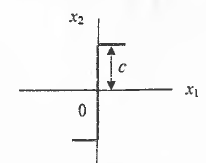
Рис.23. Идеальное реле
Чтобы реализовать данный регулятор в заданной системе автоматического управления, требуется рассчитать значения параметра с.
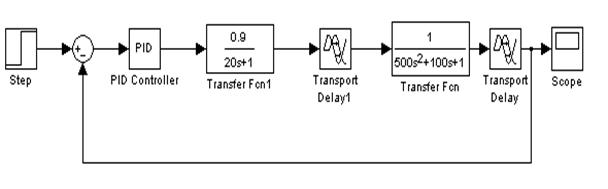
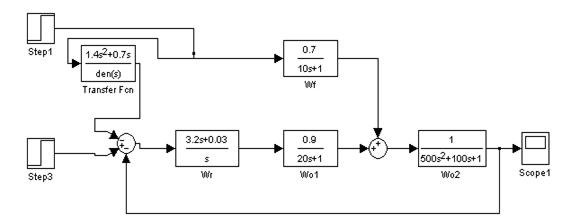
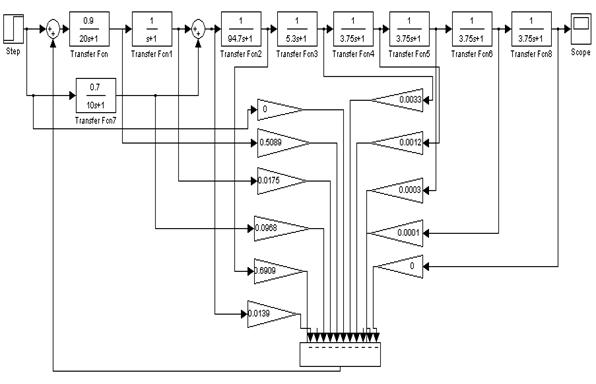
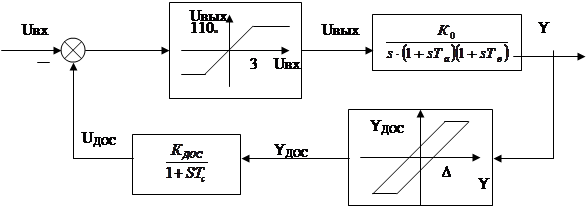
Проанализируем работу системы с нелинейной характеристикой и без неё в Simulink, а затем найдём параметры которые наиболее оптимально обеспечивают качество переходного процесса. На вход системы будем подавать единичное ступенчатое воздействие:
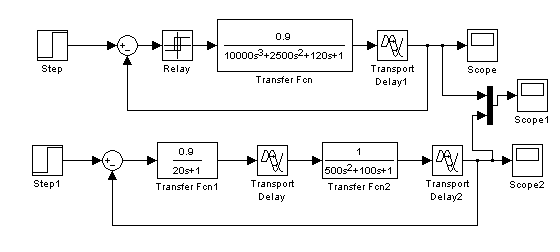
Рис.24. Сравнение работы нелинейной системы с исходной
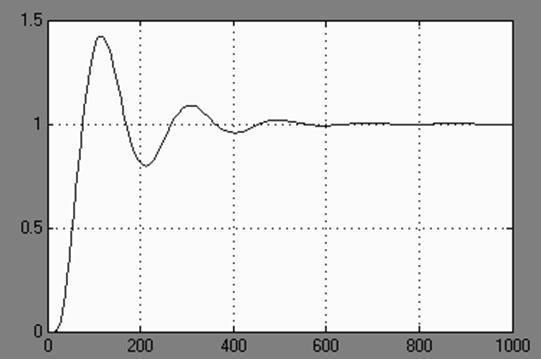
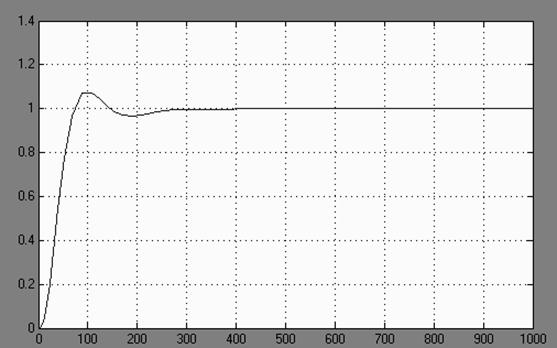
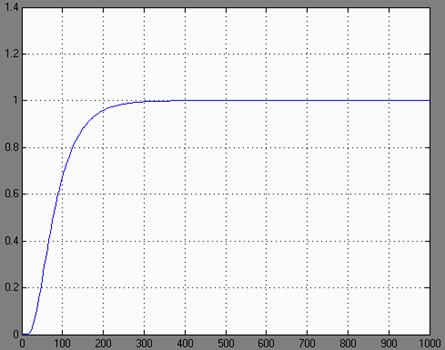
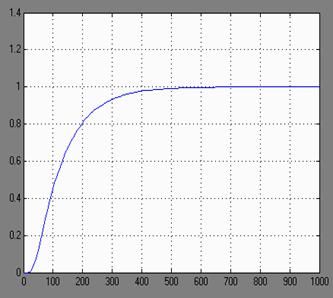
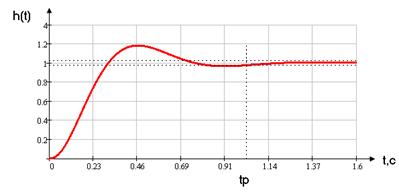
Получим следующие графики
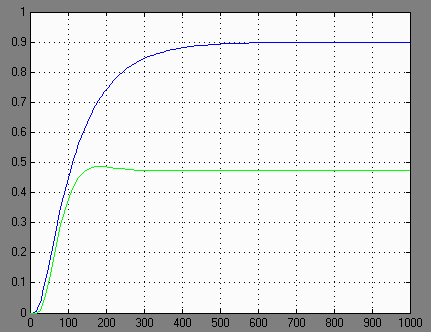
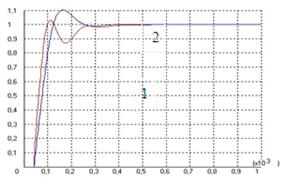
Рис.25. Работа системы с релейным регулятором и без него
Из переходных характеристик видно, что переходный процесс не выходит на установившееся значение равное единице. Следовательно надо подобрать значение параметра ![]() , удовлетворяющее данному условию, а также учесть амплитуду автоколебаний возникающих при желаемом параметре
, удовлетворяющее данному условию, а также учесть амплитуду автоколебаний возникающих при желаемом параметре ![]() .
.
Для нахождения значений параметра ![]() будем использовать графический метод гармонической линеаризации. Периодическое решение линеаризованной системы получается при наличии в характеристическом уравнении замкнутой системы пары чисто мнимых корней. Тогда в соответствии с критерием Найквиста можно записать:
будем использовать графический метод гармонической линеаризации. Периодическое решение линеаризованной системы получается при наличии в характеристическом уравнении замкнутой системы пары чисто мнимых корней. Тогда в соответствии с критерием Найквиста можно записать:
![]()
Применительно к нашему нелинейному элементу передаточная функция, полученная путём гармонической лианеризации, будет иметь следующий вид:
![]()
где ![]() , а
, а ![]()
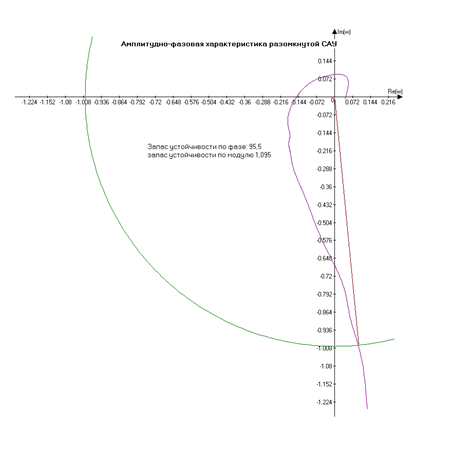
Построим амплитудно-фазовую характеристику заданной разомкнутой системы в комплексной плоскости. Графическую зависимость, которая соответствует идеальному релейному регулятору, можно и не строить, т.к. передаточная функция идеального реле не содержит мнимых составляющих. Следовательно графическая зависимость будет линейно проходить вдоль вещественной оси координат.
clc;clear;cla;
A=0:0.001:5;
C=0:0.001:5;
Wnon1=4*C./3.14.*A
Z=-1./Wnon1;
Re=real(Z);Im=imag(Z);
W1=tf([0.9],[20 1],'td',1);
W12=tf([1],[500 100 1],'td',15);
W2=W1*W12
figure(1);nyquist(W2);
hold on
figure(1);plot(Re,Im)
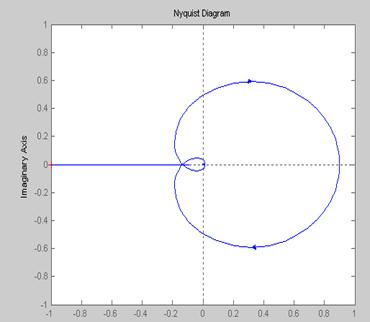

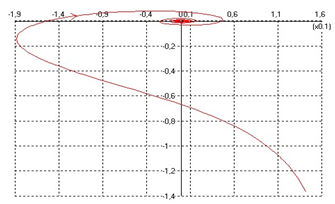
Рис. 26 Анализ точки пересечения АФЧХ линейной и нелинейной части системы
Из рис 26. мы определяем координату по вещественной оси точки пересечения амплитудно-фазовой характеристики линейной части и графической зависимости нелинейной части системы управления:
![]()
В соответствии с критерием Найквиста
![]()
![]()
Рассчитаем параметр с:
Амплитуду гармонических колебаний принимаем равным значению желаемой установившейся ошибки. После расчёта получаем значение параметра
![]()
Построим в Simulink релейный регулятор с найденными параметрами ![]()
clc;
clear;
c=0.177;
C1=1/0.9+c;
C2=1/0.9-c;
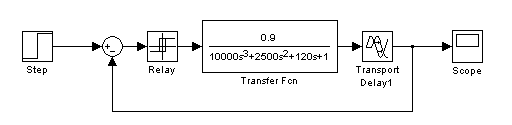
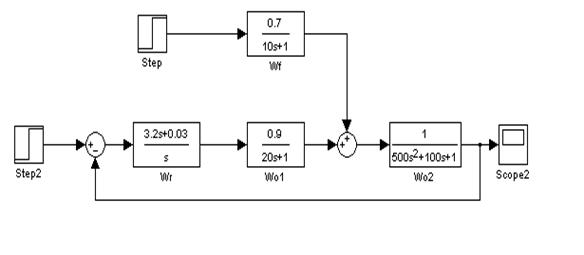
Рис.27. Моделирование нелинейного регулятора
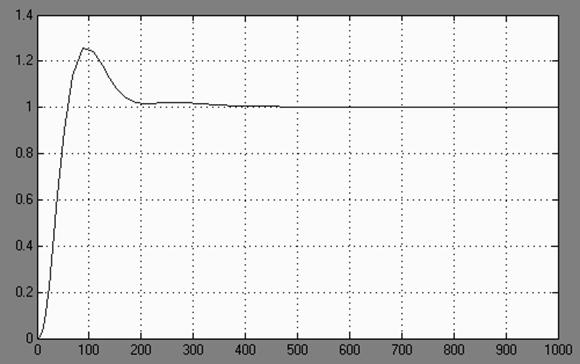
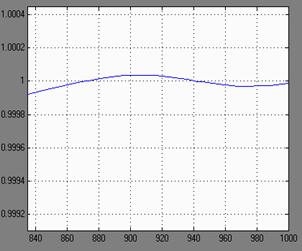
Получим следующий график
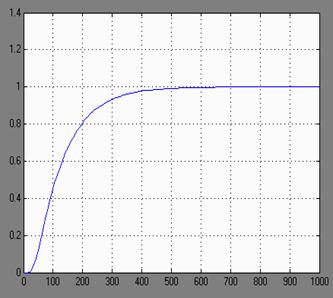
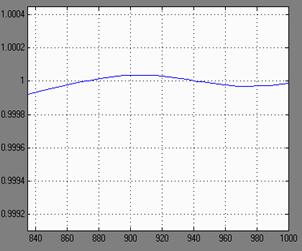
Рис.28. Переходный процесс при использовании нелинейного регулятора
Как видно из графика переходного процесса: имеют место устойчивые автоколебания, амплитуда которых не превышает значения установившейся ошибки равной 3%, заданной по заданию. Следовательно, полученный регулятор на основе нелинейного звена удовлетворяет заданным условиям.
Структура объекта с регулятором
Структура системы без компенсатора
Характеристика системы будет следующей:
Поведение системы без компенсатора
Структура системы с компенсатором
Характеристика системы будет следующей:
Поведение системы с компенсатором
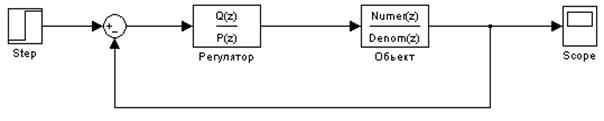
Структура системы с дискретным регулятором
Получим следующий график:
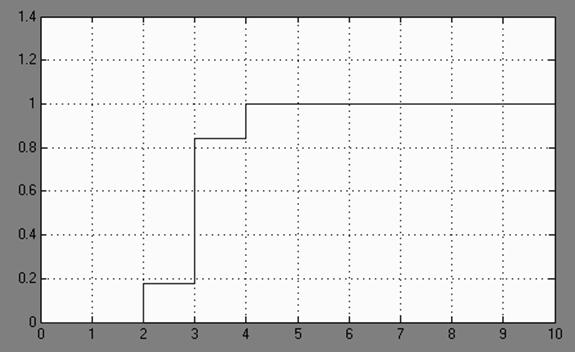
Поведение системы с дискретным регулятором
Система без дискретного компенсатора
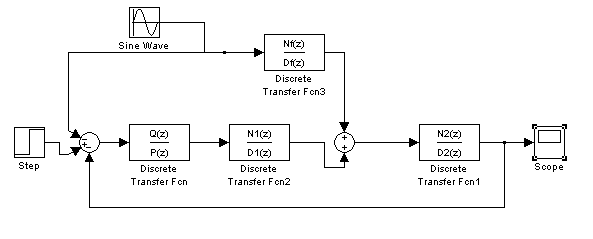
Система без дискретного компенсатора
Получим следующую характеристику:
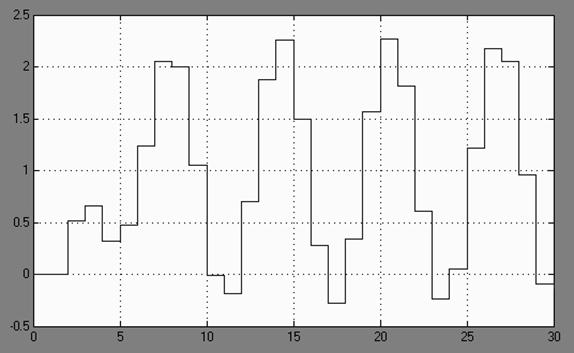
Поведение системы без дискретного компенсатора
Система с дискретным компенсатором
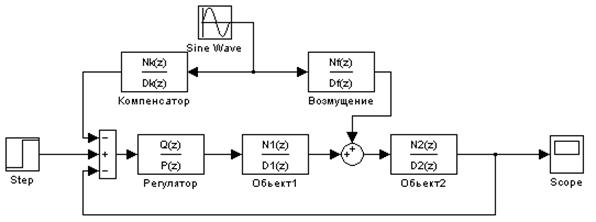
Характеристика будет следующей
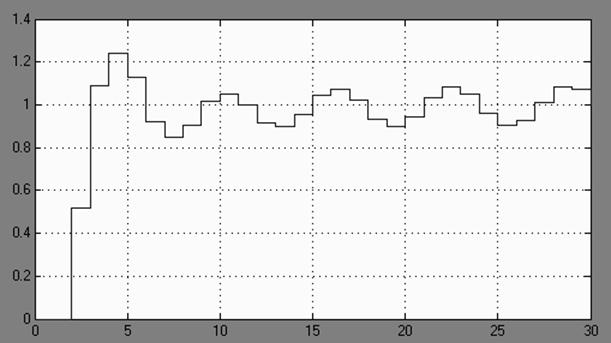
Поведение системы с дискретным компенсатором
Модель системы с оптимальным регулятором
Получим следующий график переходного процесса
Моделирование нелинейного регулятора
Переходный процесс при использовании нелинейного регулятора
Заключение
В данной курсовой работе был выполнен расчет дискретного регулятора, обеспечивающего максимальную скорость переходного процесса. Предварительно система была переведена в дискретный вид.
Далее был рассчитан дискретный компенсатор возмущающего воздействия. Для системы также был разработан оптимальный регулятор по переменным состояния и рассчитан наблюдатель состояния этих переменных.
Следует отметить, что оптимальные системы крайне чувствительны к возмущениям, кроме того, наблюдатель должен обладать быстродействием в 2-4 раза более высоким, чем остальная часть системы, что не позволяет реализовать его для высокоскоростных процессов. По этим причинам на практике оптимальные системы реализуются лишь частично.
Отметим также, что в настоящее время для целей синтеза систем автоматического регулирования используются электронные вычислительные машины, позволяющие производить полное или частичное моделирование проектируемой системы. Кроме того, все современные системы управления, в следствии всё возрастающих вычислительных и логических возможностей современных микропроцессоров, выполняются на останове цифровой техники.
Похожие работы
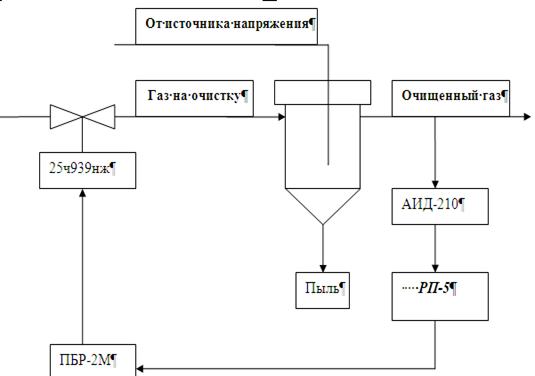
... параметры. Показателем эффективности данного процесса является степень очистки газа. Для решения задачи построена одноконтурная система управления процессом электрической очистки газа. Выбран регулятор и построена математическая модель системы управления. На модели определены оптимальные параметры регулятора. Выбраны приборы для основного контура регулирования. 1. Специальная часть ...



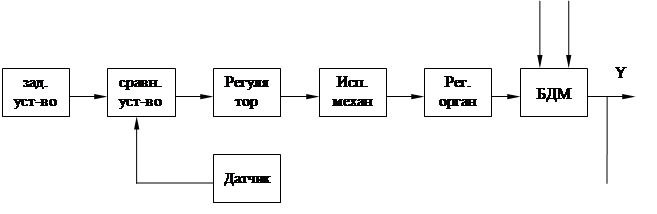
... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...
... устройства, которое нужно добавить к некоторой неизменяемой части системы, чтобы обеспечит требуемое качество системы в установившемся и переходном режимах. Наиболее приемлемым для решения задачи динамического синтеза является метод логарифмических амплитудных характеристик (метод ЛАХ). [1, § 12.5] Стадии синтеза по методу ЛАХ включают: 1. построение располагаемой ЛАХ, т.е. ЛАХ исходной ...

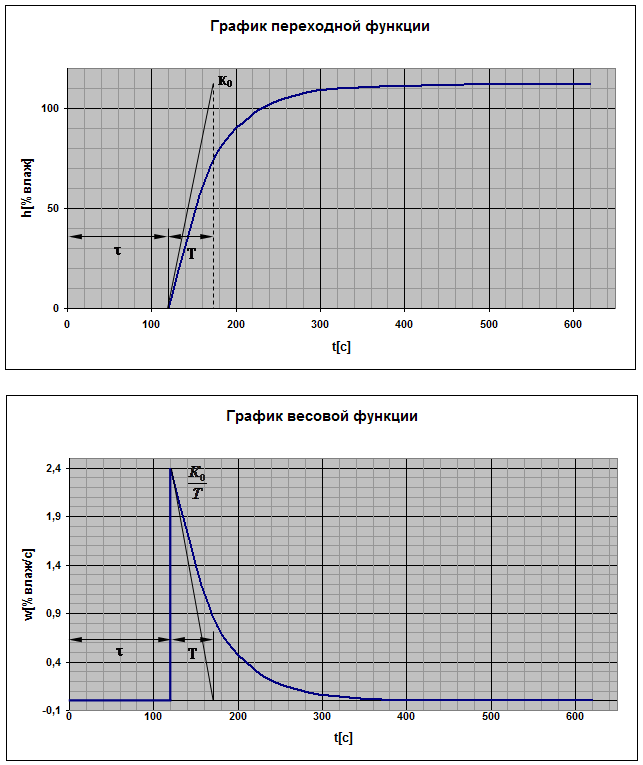
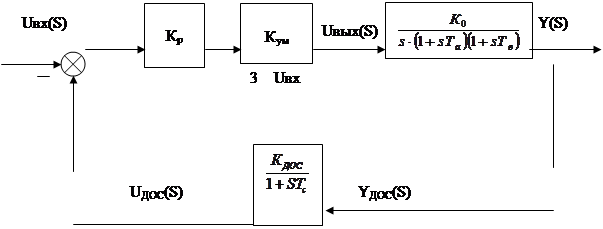
... воздействие) Δf(t) [%] - изменение концентрации массы (возмущающее воздействие) Δy(t) [г/м2] – изменение массы 1кв.м. полотна (выходная переменная) Временные характеристики по каналу управления. Передаточная функция объекта регулирования. Wоб(р) = К0 - коэффициент передачи - постоянная времени Т =50 с - запаздывание информации t =120 ...
0 комментариев