Навигация
Анализ нагруженности плоского рычажного механизма
15733
знака
7
таблиц
1
изображение
Анализ нагруженности плоского рычажного механизма
СОДЕРЖАНИЕ
Таблица исходных данных
ВВЕДЕНИЕ
1. ДИНАМИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
1.1 Структурный анализ механизма
1.1.1 Структурная схема механизма
1.1.2 Перечень звеньев механизма
1.1.3 Определение степени подвижности механизма
1.2 Динамический анализ механизма
1.2.1 Построение плана скоростей
1.2.2 Построение плана ускорений
1.3 Кинетостатический анализ механизма 1.3.1 Определение сил инерции механизма1.3.2 Определение реакций в кинематических парах
1.3.3 Определение уравновешивающей силы и уравновешивающего момента
2. ПРОЕКТНЫЙ РАСЧЕТ ЗВЕНЬЕВ МЕХАНИЗМА НА ПРОЧНОСТЬ
2.1 Построение эпюр
2.2 Подбор сечений
ВЫВОДЫ
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
Таблица исходных данных
| № | Параметры | Единицы измерения | Вариант |
| 3 | |||
| 1. | Частота вращения ведущего звена | n, об/мин | 210 |
| 2. | Длина О1А | мм | 25 |
| 3. | Длина АВ | мм | 80 |
| 4. | Длина O2B | мм | 60 |
| 5. | Длина ED | мм | 80 |
| 6. | Длина O1O2 | мм | 70 |
| 7. | Длина О2Е | мм | 35 |
| 8. | Длина АS2 | мм | 40 |
| 9. | Длина O1S1 | мм | 10 |
| 10. | Длина O2S3 | мм | 36 |
| 11. | Длина ES4 | мм | 35 |
| 12. | Масса звена АО1 | Н | 36 |
| 13. | Масса звена АВ | Н | 50 |
| 14. | Масса звена ВО2 | Н | 32 |
| 15. | Масса звена ED | Н | 40 |
| 16. | Масса ползуна D | Н | 40 |
| 17. | Момент инерции звена АВ | Кг*м2 | 0,0008 |
| 18. | Момент инерции звена ВО2 | Кг*м2 | 0,0008 |
| 19. | Момент инерции звена DE | Кг*м2 | 0,0007 |
ВВЕДЕНИЕ
В процессе развития человек научился создавать и широко использовать искусственных помощников, которые заменяют ручной труд.
Различают три группы таких устройств:
1. Машины;
2. Аппараты;
3. Приборы.
Для машин характерна периодическая повторность перемещения их составных частей, в частности, рабочих устройств (рабочих органов), которые непосредственно выполняют производственные операции.
Составные части машин вместе с рабочими устройствами обычно называют механизмами, а твердые тела, их составляющие, называют звеньями. Звенья в свою очередь тоже могут иметь составляющие, которые называются деталями. Звенья, входящие в механизм всегда соединяются между собой, и подвижное соединение каждых двух звеньев называется кинематической парой.
Совокупность звеньев и пар образуют кинематическую цепь. Из кинематических цепей и образуются механизмы.
В зависимости от расположения траекторий звеньев различают два вида механизмов – пространственный и плоский.
В ходе данной работы рассмотрим плоский механизм, относящийся к классу наиболее часто используемых в современных машинах механизмов.
1. ДИНАМИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
1.1 Структурный анализ механизма
1.1.1 Структурная схема механизма
Структурную схему механизма следует строить в выбраном маштабе, придерживаясь заданных размеров звеньев. На кинематической схеме должны быть данные о всем необходимом для определения движения. Структурная схема механизма приведена в заданном положении на рисунке 1.1
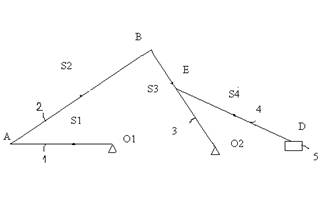
Рисунок 1.1 Структурная схема механизма
0) стойка;
1) кривошип;
2-3) шатун;
4) коромысло;
5) ползун;
Похожие работы
... длину вектора и переведем ее обратно: = 79 мм = 2370 Н 2. ПРОЕКТНЫЙ РАСЧЕТ ЗВЕНЬЕВ МЕХАНИЗМА НА ПРОЧНОСТЬ 2.1 Выбор расчетной схемы В результате динамического анализа плоского рычажного механизма были определены внешние силы, которые действуют на каждое звено и кинематическую пару. Такими внешними силами являются силы инерции , моменты инерции и реакции в кинематических парах R. Под ...
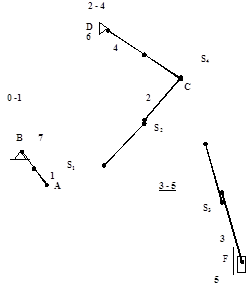
... напряжений; 4) определить размеры детали и округлить их до ближайших стандартных, согласно которым будет производится подбор сечений. 2.1 Выбор расчетной схемы В результате динамического анализа плоского рычажного механизма были определены внешние силы, которые действуют на каждое звено и кинематическую пару. Проектный расчет на прочность будем производить для группы Ассура 2-4 данного ...
... 74 R05 24.4 0,005 G4 14,7 Fi4 7.02 R04 7.6 G5 24,5 Fi5 8.125 Fур 0,197 2 ПРОЕКТНЫЙ РАСЧЕТ МЕХАНИЗМА НА ПРОЧНОСТЬ В результате динамического анализа плоского рычажного механизма были определены внешние силы, действующие на каждое звено и кинематическую пару. Этими ...
... H 14 23,4 22 R, H 14 24,2 11,8 1 22,2 2. Расчет элементов кинематических пар на прочность. 2.1. Определение внешних сил, действующих на звенья. В результате динамического анализа плоского рычажного механизма определены внешние силы, действующие на звенья и кинематические пары. Такими внешними усилиями являются силы инерции F , моменты инерции M , а также реакции ...
0 комментариев