Навигация
Определение ускорений точек и звеньев механизма
15733
знака
7
таблиц
1
изображение
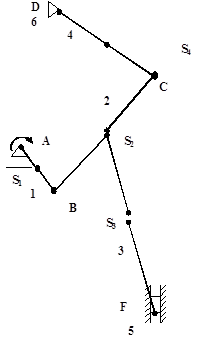
1.2.2 Определение ускорений точек и звеньев механизма
Для определения ускорений точек применяем метод планов ускорений. Построение плана ускорений начинаем с ведущего звена механизма, учитывая, w – постоянная величина. Тогда ускорение точки А ведущего звена:
![]() м/с2, (1.17)
м/с2, (1.17)
Определение масштабного коэффициента плана ускорений производится следующим образом:
![]() м/с2.мм, (1.18)
м/с2.мм, (1.18)
где pаа – длина вектора в мм.
Векторное уравнение плоскопараллельного движения звена АВ с полюсом в точке А имеют вид:
![]() (1.19)
(1.19)
где ![]() – нормальная составляющая ускорения точки В в её относительном движении вокруг точки А;
– нормальная составляющая ускорения точки В в её относительном движении вокруг точки А;
![]() – тангенциальная составляющая ускорения точки В в её относительном движении вокруг точки А.
– тангенциальная составляющая ускорения точки В в её относительном движении вокруг точки А.
В этой векторной сумме ускорение точки А известно, нормальная составляющая ускорения движения точки В относительно точки А направлено от точки В к точке В и равно:
 , (1.20)
, (1.20)
А его длина на плане ускорений считается с учётом масштабного коэффициента по формуле:
 , (1.21)
, (1.21)
На плане ускорений с точки а вдоль звена АВ проводим вектор длинной nВА. О третьем составляющем векторного ускорения известно только направление – перпендикулярное звену. Потому на плане ускорений с конца вектора nВА проводим перпендикулярную линию.
Ускорение точки D найдем из звена ED. Тогда ускорение точки D равно:
![]() (1.22)
(1.22)
В векторном уравнении 1.22 первое слагаемое известно, второе направлено от точки вдоль звена и численно равно:
 м/с
(1.23)
м/с
(1.23)
Длина отрезка на плане ускорений:
 1.3 мм (1.24)
1.3 мм (1.24)
Найдем ускорение aD из звена ED :
![]() (1.25)
(1.25)
![]() м/с (1.26)
м/с (1.26)
![]() (1.27)
(1.27)
Значения ускорений точек и звеньев занесены в таблицу 1.2.
Угловые ускорения рассчитываются по формулам:
![]() (1.28)
(1.28)
 (1.29)
(1.29)
![]() (1.30)
(1.30)
Для определения центра масс aS1 звена ОА найдем на плане ускорения точку S1, по условию она лежит по средине звена, поэтому:
![]() м/c2 (1.31)
м/c2 (1.31)
Аналогично находим центры масс других звеньев:
![]() (1.32)
(1.32)
![]() (1.33)
(1.33)
![]() (1.34)
(1.34)
![]() (1.35)
(1.35)
Ускорения точек занесем в таблицу 1.2.
Таблица 1.2 – Ускорения точек и центров масс угловые ускорения звеньев механизма
| аА | аВ | аЕ | аD | E2 | E3 | E4 |
| мм/с2 | мм/с2 | мм/с2 | мм/с2 | 1/с2 | 1/с2 | 1/с2 |
| 12.07 | 12,8 | 9,2 | 11,5 | 295 | 220 | 65 |
| aD |
| aS3 | aS4 | - | - | - |
| 1/с2 | 1/с2 | 1/с2 | 1/с2 | - | - | - |
| 5.6 | 4.6 | 9 | 6.4 | - | - | - |
Масштабный коэффициент плана ускорений – 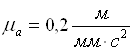 .
.
Если к механизму кроме внешних сил приложить силы инерции его звеньев, то условно можно считать, что механизм находится в равновесии. В этом случае для определения реакций в кинематических парах можно использовать уравнения статики, если в них включить силы инерции звеньев.
Сила инерции звена направлена в сторону, противоположную направлению ускорения центра масс этого звена и равна произведению массы этого звена на ускорение центра масс:
![]() (1.36)
(1.36)
При этом существует также главный момент инерции звена, который приложен к центру масс звена и направлен в противоположную угловому ускорению звена сторону. Определяется по формуле:
![]() (1.37)
(1.37)
где IS – момент инерции звена, для стержневого механизма ![]() ,
, ![]() ;
;
Е– угловое ускорение звена, ![]() .
.
Силы инерции механизма приведены в табл. 1.3.
Таблица 1.3 – Рассчитанные значения сил и моментов инерции звеньев механизма
| Fи2 | Fи3 | Fи4 | Fи5 |
| Н | Н | Н | Н |
| 23 | 28,8 | 26,6 | 22,4 |
Масштабный коэффициент плана сил
![]()
где ![]() - длина вектора на плане сил
- длина вектора на плане сил
Похожие работы
... длину вектора и переведем ее обратно: = 79 мм = 2370 Н 2. ПРОЕКТНЫЙ РАСЧЕТ ЗВЕНЬЕВ МЕХАНИЗМА НА ПРОЧНОСТЬ 2.1 Выбор расчетной схемы В результате динамического анализа плоского рычажного механизма были определены внешние силы, которые действуют на каждое звено и кинематическую пару. Такими внешними силами являются силы инерции , моменты инерции и реакции в кинематических парах R. Под ...
... напряжений; 4) определить размеры детали и округлить их до ближайших стандартных, согласно которым будет производится подбор сечений. 2.1 Выбор расчетной схемы В результате динамического анализа плоского рычажного механизма были определены внешние силы, которые действуют на каждое звено и кинематическую пару. Проектный расчет на прочность будем производить для группы Ассура 2-4 данного ...
... 74 R05 24.4 0,005 G4 14,7 Fi4 7.02 R04 7.6 G5 24,5 Fi5 8.125 Fур 0,197 2 ПРОЕКТНЫЙ РАСЧЕТ МЕХАНИЗМА НА ПРОЧНОСТЬ В результате динамического анализа плоского рычажного механизма были определены внешние силы, действующие на каждое звено и кинематическую пару. Этими ...
... H 14 23,4 22 R, H 14 24,2 11,8 1 22,2 2. Расчет элементов кинематических пар на прочность. 2.1. Определение внешних сил, действующих на звенья. В результате динамического анализа плоского рычажного механизма определены внешние силы, действующие на звенья и кинематические пары. Такими внешними усилиями являются силы инерции F , моменты инерции M , а также реакции ...
0 комментариев