Навигация
Силы, действующие автомобиль при повороте
31721
знак
1
таблица
11
изображений
1.2 Силы, действующие автомобиль при повороте
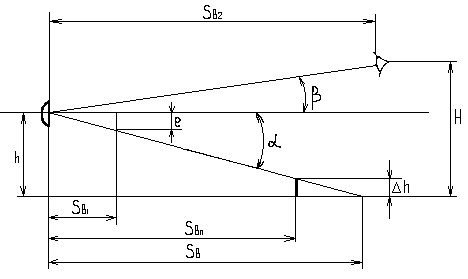
Процесс движения автомобиля на повороте включает в себя три фазы (рисунок 1.3, а): вход в поворот (участок АБ), поворот (БВ) и выход из него (ВГ).
При входе в поворот управляемые колеса двигавшегося прямолинейно автомобиля поворачиваются, и он движется по кривой уменьшающегося радиуса.
При повороте управляемые колеса повернуты на определенный угол, и движение происходит по кривой постоянного радиуса.
При выходе из поворота управляемые колеса возвращаются в нейтральное положение, и автомобиль движется по кривой увеличивающегося радиуса, а затем — прямолинейно.
Во время движения на повороте на автомобиль (рисунок 1.3, б) действуют следующие силы: центробежная рц и ее поперечная ру и продольная рх составляющие, а также поперечные реакции дороги: Ry1 — на передний и Ry2 — на задний мосты.
Основной действующей силой при повороте является поперечная составляющая ру центробежной силы, которая направлена перпендикулярно продольной оси автомобиля и представляет собой сумму трех сил:
![]() (5)
(5)
Сила P’у всегда возникает при криволинейном движении. Она пропорциональна квадрату скорости и действует в процессе всего поворота. Сила P’’у появляется в результате изменения угла поворота управляемых колес и действует при входе и выходе из поворота. Сила P’’’у возникает вследствие изменения скорости движения и действует только при неравномерном движении на повороте. Из трех указанных составляющих наибольшее значение имеет сила P’у, на долю которой приходится 90 % силы Pу. Поэтому для автомобилей общего назначения и специализированных автомобилей силами P’у и P’’у пренебрегают.
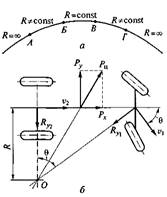
Рисунок 1.3. Поворот автомобиля:
а — фазы процесса попорота; б — силы, действующие при повороте;
А – Г — характерные точки траектории поворота автомобиля;
v1, v2 — векторы скоростей передних и задних колес
Их учитывают только для специальных автомобилей (пожарные, автомобили «скорой помощи» и др.), движущихся на поворотах с более высокими скоростями.
При равномерном движении на повороте поперечная составляющая центробежной силы
![]() (6)
(6)
Она пропорциональна квадрату скорости движения, поэтому быстро возрастает при увеличении скорости.
Поперечные реакции дороги на передний и задний мосты при равномерном движении на повороте
![]() (7,8)
(7,8)
Из этих выражений следует, что центробежные силы, действующие на передний и задний мосты, можно считать пропорциональными приходящемуся на них весу G1, и G2[1].
2 ВЛИЯНИЕ РАЗЛИЧНЫХ ФАКТОРОВ НА УПРАВЛЯЕМОСТЬ АВТОМОБИЛЯ
2.1 Установка управляемых колес
На управляемость автомобиля оказывают влияние различные конструктивные и эксплуатационные факторы. К ним относятся установка и стабилизация управляемых колес, подвеска и шины, техническое состояние рулевого управления, блокировка колес при торможении, колебания управляемых колес, усилители рулевого управления, кузов автомобиля, квалификация водителя и др.
Для создания наименьшего сопротивления движению, уменьшения износа шин и снижения расхода топлива управляемые колеса должны катиться в вертикальных плоскостях, параллельных продольной оси автомобиля. С этой целью управляемые колеса устанавливают на автомобиле с развалом в вертикальной и со схождением в горизонтальной плоскости.
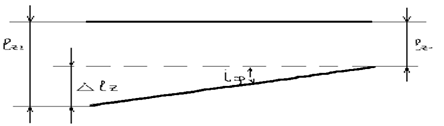
Углом развала управляемых колес ар называется угол (рисунок 2.1, а), заключенный между плоскостью колеса и вертикальной плоскостью, параллельной продольной оси автомобиля. Угол развала считается положительным, если колесо наклонено от автомобиля наружу, и отрицательным при наклоне колеса внутрь.
Угол развала необходим для того, чтобы обеспечить перпендикулярное расположение колес по отношению к поверхности дороги при деформации деталей моста под действием веса передней части автомобиля. Этот угол уменьшает плечо поворота — расстояние между точкой пересечения продолжения оси поворота (шкворня) и точкой касания колеса плоскости дороги. В результате существенно уменьшается момент, необходимый для поворота управляемых колес, и, следовательно, облегчается поворот автомобиля.
При установке колеса с развалом возникает осевая сила, прижимающая ступицу с колесом к внутреннему подшипнику, раз мер которого обычно больше, чем размер наружного подшипника. Вследствие этого разгружается наружный подшипник ступицы колеса. Угол развала обеспечивается конструкцией управляемого моста путем наклона поворотной цапфы и составляет 0...2".
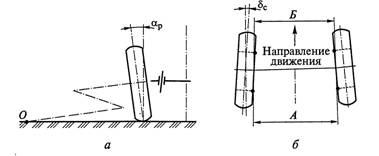
Рисунок 2.1. Схемы установки управляемых колес:
а — развал; б — схождение; О — точка пересечения продолжения оси колеса с плоскостью дороги; А, Б — расстояния между задними и передними частями колес
При наличии развала управляемое колесо стремится катиться в сторону от автомобиля по дуге вокруг точки О (рисунок 2.1, а) пересечения продолжения его оси с плоскостью дороги. Так как управляемые колеса связаны между собой, то их качение по расходящимся дугам сопровождалось бы боковым скольжением. Для предотвращения такого скольжения управляемые колеса устанавливают со схождением, т.е. не параллельно, а под некоторым углом к продольной оси автомобиля.
Угол схождения управляемых колес δС (рисунок 2.1, б) определяется разностью расстояний А и Б между колесами, которые измеряют сзади и спереди по краям ободьев на высоте оси колес. Угол схождения колес у автомобилей находится в пределах 0°20'... 1°, а разность расстояний А и Б между колесами сзади и спереди составляет 2... 12 мм.
Установка управляемых колес с одновременным развалом и схождением обеспечивает их прямолинейное качение по дороге без бокового скольжения. При этом должно быть правильно подобрано соотношение между углами развала и схождения. Каждому углу развала соответствует определенный угол схождения, при котором сопротивление движению, расход топлива и износ шин будут минимальными. Обычно оптимальный угол схождения управляемых колес составляет в среднем 15...20% угла их развала. Однако в процессе эксплуатации управляемые колеса часто устанавливают со схождением несколько большим, чем требуется для компенсации их развала. Это вызвано тем, что у колес вследствие наличия зазоров и упругости рулевого привода может появиться отрицательное схождение. В результате даже при их положительном развале возрастают сопротивление движению, расход топлива и износ шин[3].
Похожие работы

... и др., а также приобретен преподавателями ВУЗов ценный опыт ездовых испытаний автомобилей. 3. Оценка параметров устойчивости и управляемости АТС в стендовых условиях Устойчивость и управляемость АТС в значительной степени определяют активную безопасность автотранспортных средств (АТС) и, следовательно, общий уровень безопасности дорожного движения (БДД). В настоящее время международные и ...
... —к «массе». Качество отработки элементов вождения по трудным грунтам зависит от наличия и состояния цепей противоскольжения, трековых дорожек, матов и средств самовытаскивания 4. РАЗРАБОТКА КОНСТРУКЦИИ ДУБЛИРУЮЩЕГО УСТРОЙСТВА УПРАВЛЕНИЯ 4.1. ОПРЕДЕЛЕНИЕ РАСЧЕТНОЙ НАГРУЗКИ НА ВАЛ, ВОЗВРАТНЫЕ ПРУЖИНЫ И ПЕДАЛИ. Номинальное усилие на дополнительные педали тормоза и сцепления будет находиться в ...
... 33,33 Pк, кН 0,606 0,431 0,460 0,491 0,526 Pв, кН 0,771 0,292 0,369 0,456 0,552 Р, кН 1,377 0,723 0,829 0,947 1,078 2. Расчет параметров торможения транспортного средства Во время движения водитель постоянно изменяет скорость автомобиля в соответствии с изменением дорожной обстановки. Он постоянно должен быть готов в случае необходимости к ...



... некоторые опции сидений изменяют размер и положение подголовника. ТРАВМОБЕЗОПАСНЫЙ РУЛЕВОЙ МЕХАНИЗМ Травмобезопасное рулевое управление является одним из конструктивных мероприятий, обеспечивающих пассивную безопасность автомобиля – свойство уменьшать тяжесть последствий дорожно-транспортных происшествий. Рулевой механизм рулевого управления может нанести серьёзную травму водителю при лобовом ...
0 комментариев