Навигация
Стабилизация управляемых колес
31721
знак
1
таблица
11
изображений
2.2 Стабилизация управляемых колес
При движении силы, действующие на автомобиль, стремятся отклонить управляемые колеса от положения, соответствующего прямолинейному движению. Чтобы не допустить поворота управляемых колес под действием возмущающих сил (толчки от неровностей дороги, порывы ветра и др.), управляемые колеса должны обладать стабилизацией.
Стабилизацией управляемых колес называется их свойство сохранять положение, отвечающее прямолинейному движению, и автоматически возвращаться в это положение.
Чем выше стабилизация управляемых колес, тем легче управлять автомобилем, выше безопасность движения, меньше износ шин и рулевого управления.
На автомобилях стабилизация управляемых колес обеспечивается наклоном шкворня или оси поворота колес в поперечной и продольной плоскостях и упругими свойствами пневматической шины, которые создают соответственно весовой, скоростной и упругий стабилизирующие моменты.
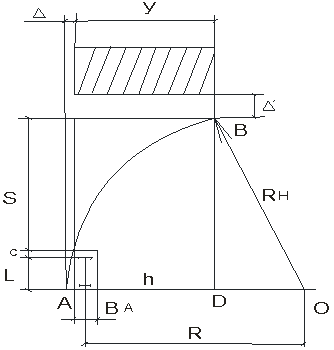
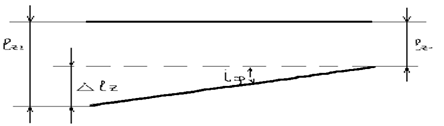
Весовой стабилизирующий момент возникает вследствие поперечного наклона шкворня или оси поворота управляемого колеса (при бесшкворневой подвеске). Поперечный наклон оси поворота (рисунок 2.2), характеризуемый углом βш, при повороте колеса вызывает подъем передней части автомобиля на некоторую высоту h’. При этом масса передней части стремится возвратить колесо в положение прямолинейного движения. Создаваемый в данном случае стабилизирующий момент и является весовым.
Хотя весовой стабилизирующий момент меньше, чем стабилизирующий момент шины, он не зависит ни от скорости движения, ни от сцепления колеса с дорогой. У автомобилей угол поперечного наклона шкворня (оси поворота) управляемого колеса βш = 5... 10°. При увеличении угла βш повышается стабилизация управляемых колес, но затрудняется работа водителя[2].
Весовой стабилизирующий момент приближенно можно рассчитать по следующей формуле:
![]() (9)
(9)
где Gк — нагрузка на колесо; lц — длина поворотной цапфы; θ — угол поворота колеса.

Рисунок 2.2 Поперечный наклон оси поворота управляемого колеса
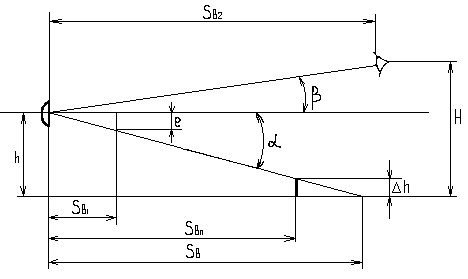
Скоростной стабилизирующий момент создается в результате продольного наклона шкворня. Продольный наклон оси поворота (рисунок 2.3), определяемый углом γш, создает плечо а действия реакций дороги, возникающих при повороте колеса между шиной и дорогой в месте их касания. Эти реакции помогают возврату колеса в положение, соответствующее прямолинейному движению. Создаваемый в этом случае стабилизирующий момент и является скоростным.
Обычно боковые реакции дороги на колесах возникают вследствие действия на автомобиль центробежной силы, которая пропорциональна квадрату скорости движения на повороте. Поэтому скоростной стабилизирующий момент изменяется пропорционально квадрату скорости движения.
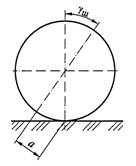
Рисунок 2.3 Продольный наклон оси поворота управляемого колеса
У автомобилей угол продольного наклона оси поворота управляемых колес уш = 0...3,5°. При увеличении угла уш повышается стабилизация управляемых колес, но усложняется работа водителя.
Скоростной стабилизирующий момент
![]() (10)
(10)
где а — плечо действия реакции дороги Ry, rк — радиус колеса; γш — угол продольного наклона шкворня.
Упругий стабилизирующий момент шины создается при повороте управляемого колеса вследствие смещения результирующей боковых сил, действующих в месте контакта шины с дорогой, относительно центра контактной площадки (рисунок 2.4).
Упругий стабилизирующий момент, создаваемый шиной:
![]() (11)
(11)
где Рб — результирующая боковых сил; b — плечо действия силы Рб.

Рисунок 2.4 Схема возникновения упругого стабилизирующего момента шины
Стабилизирующий момент шины достигает значительной величины у легковых автомобилей, которые имеют высокоэластичные шины и движутся с большой скоростью. Он может составлять 200...250Н·м при углах увода колес 4...5°. Поэтому при очень эластичных шинах угол продольного наклона шкворня делают равным нулю, чтобы не усложнять управление автомобилем. Однако при небольшой скорости движения стабилизирующий момент шины не обеспечивает надежной стабилизации управляемых колес. Кроме того, упругий стабилизирующий момент шины резко уменьшается на дорогах с небольшим коэффициентом сцепления (скользких, обледенелых).
Стабилизация управляемых колес неразрывно связана с установкой управляемых колес автомобиля[1].
Похожие работы

... и др., а также приобретен преподавателями ВУЗов ценный опыт ездовых испытаний автомобилей. 3. Оценка параметров устойчивости и управляемости АТС в стендовых условиях Устойчивость и управляемость АТС в значительной степени определяют активную безопасность автотранспортных средств (АТС) и, следовательно, общий уровень безопасности дорожного движения (БДД). В настоящее время международные и ...
... —к «массе». Качество отработки элементов вождения по трудным грунтам зависит от наличия и состояния цепей противоскольжения, трековых дорожек, матов и средств самовытаскивания 4. РАЗРАБОТКА КОНСТРУКЦИИ ДУБЛИРУЮЩЕГО УСТРОЙСТВА УПРАВЛЕНИЯ 4.1. ОПРЕДЕЛЕНИЕ РАСЧЕТНОЙ НАГРУЗКИ НА ВАЛ, ВОЗВРАТНЫЕ ПРУЖИНЫ И ПЕДАЛИ. Номинальное усилие на дополнительные педали тормоза и сцепления будет находиться в ...
... 33,33 Pк, кН 0,606 0,431 0,460 0,491 0,526 Pв, кН 0,771 0,292 0,369 0,456 0,552 Р, кН 1,377 0,723 0,829 0,947 1,078 2. Расчет параметров торможения транспортного средства Во время движения водитель постоянно изменяет скорость автомобиля в соответствии с изменением дорожной обстановки. Он постоянно должен быть готов в случае необходимости к ...



... некоторые опции сидений изменяют размер и положение подголовника. ТРАВМОБЕЗОПАСНЫЙ РУЛЕВОЙ МЕХАНИЗМ Травмобезопасное рулевое управление является одним из конструктивных мероприятий, обеспечивающих пассивную безопасность автомобиля – свойство уменьшать тяжесть последствий дорожно-транспортных происшествий. Рулевой механизм рулевого управления может нанести серьёзную травму водителю при лобовом ...
0 комментариев