Навигация
Колебания управляемых колес
31721
знак
1
таблица
11
изображений
2.3 Колебания управляемых колес
В процессе движения управляемые колеса автомобиля могут совершать колебания вокруг шкворней (осей поворота) в горизонтальной плоскости. Такие колебания вызывают износ шин и рулевого привода, повышают сопротивление движению и увеличивают расход топлива. Они могут привести к потере управляемости автомобиля и снижению безопасности движения. Причинами, вызывающими эти колебания, являются гироскопическая связь управляемых колес, их неуравновешенность (дисбаланс) и двойная связь колес с несущей системой (рама, кузов) через рулевой привод и подвеску.
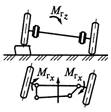
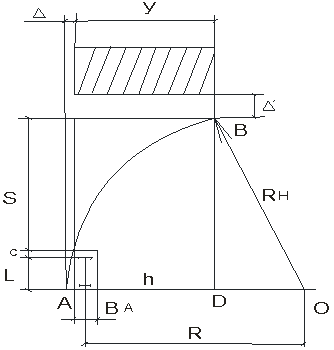
Рисунок 2.5 Схема возникновения самовозбуждающихся колебаний (автоколебаний) управляемых колес при зависимой подвеске
При наездах одного из колес на дорожные неровности при зависимой их подвеске (рисунок 2.5) происходит перекос переднего моста. Управляемые колеса наклоняются, и изменяется положение их оси вращения. Это приводит к возникновению гироскопического момента мrx, который действует в горизонтальной плоскости и поворачивает управляемые колеса вокруг шкворней[3].
Поворот колес вокруг шкворней вызывает возникновение другого гироскопического момента мrz, который действует в вертикальной плоскости и стремится увеличить перекос моста и наклон колес.
Таким образом, перекос моста обусловливает колебания управляемых колес вокруг шкворней, а они, в свою очередь, увеличивают перекос моста, т.е. обе колебательные системы связаны между собой и влияют друг на друга.
Возникающие в этом случае колебания управляемых колес вокруг шкворней непрерывно повторяются (самовозбуждаются), являются устойчивыми и наиболее опасными.
При вращении неуравновешенного колеса (рисунок 2.6) возникает центробежная сила рц. Ее вертикальная составляющая Рz стремится переместить колесо в вертикальном направлении и наклонить его, что вызывает появление гироскопического момента мх. Горизонтальная составляющая рх центробежной силы стремится повернуть колесо вокруг шкворня. Колебания управляемых колес становятся особенно значительными, когда не уравновешены оба колеса и неуравновешенные части располагаются с разных сторон осей вращения, так как в этом случае поворачивающие моменты мх складываются. Колебания также возрастают при увеличении скорости движения автомобиля в связи с тем, что значения составляющих рz и рх центробежной силы рц во многом зависят от скорости[1].
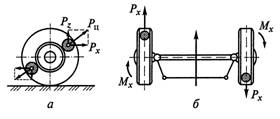
Рисунок 2.6. Дисбаланс управляемых колес:
а — силы, действующие на неуравновешенные колеса; б — схема возникновения поворачивающего момента
Управляемые колеса автомобиля имеют двойную связь с его несущей системой, которая осуществляется через подвеску и рулевой привод.
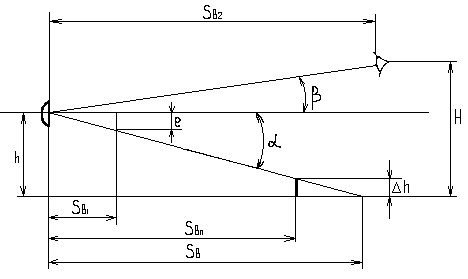
При вертикальных перемещениях колеса (рисунок 2.7) шарнир А, соединяющий продольную рулевую тягу с рычагом поворотного кулака, должен перемещаться по дуге бб с центром в точке О1,что обусловлено кинематикой рулевого привода.

Рисунок 2.7. Связь управляемых колес с несущей системой автомобиля:
А — шарнир; О,О1 — центры колебаний; аа, бб — траектории перемещения шарнира
Кроме того, шарнир А также должен перемещаться по дуге аа с центром в точке О, что связано с особенностями кинематики подвески. Однако дуги аа и бб расходятся, поэтому вертикальные перемещения управляемых колес сопровождаются их поворотом вокруг шкворней.
Колебания управляемых колес вокруг шкворней совершаются с высокой и низкой частотой.
Колебания высокой частоты, превышающей 10Гц, с амплитудой не более 1,5...2° происходят в пределах упругости шин и рулевого привода. Эти колебания не передаются водителю и не приводят к нарушению управляемости автомобиля, так как поглощаются в рулевом управлении. Однако высокочастотные колебания вызывают дополнительный износ шин и деталей рулевого привода, повышают сопротивление движению автомобиля и увеличивают расход топлива.
Колебания низкой частоты (менее 1Гц) с амплитудой 2...3" нарушают управляемость автомобиля и безопасность движения. Для их устранения необходимо снизить скорость автомобиля.
Полностью устранить колебания управляемых колес вокруг шкворней невозможно — их можно только уменьшить. Это обеспечивается применением независимой подвески управляемых колес, что ослабляет гироскопическую связь между ними, применением балансировки колес, благодаря чему устраняется их неуравновешенность, уменьшением влияния двойной связи колес с несущей системой, что достигается принятием различных конструктивных мер[4].
2.4 Увод колес автомобиля
Уводом колеса называется его свойство катиться под углом к плоскости своего вращения вследствие действия боковой силы.
Эластичное колесо (рисунок 2.8) при отсутствии боковой силы катится в плоскости своего вращения, а при действии боковой силы — под некоторым углом.
Угол δув, образованный вектором скорости vK колеса и плоскостью его качения, называется углом увода.
На рисунке 2.9 показана зависимость угла увода колеса от приложенной к нему поперечной силы. Кривая ОАБВ включает в себя следующие характерные участки: OA — увод колеса при отсутствии бокового скольжения шины (δув= 4...6°); АБ — увод с частичным боковым проскальзыванием шины; БВ— полное скольжение шины вбок при Py = Pсц (δув = 12…15°).
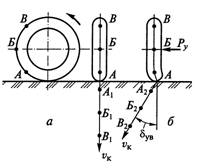
Рисунок 2.8. Качение эластичного колеса при отсутствии (а) и действии (б) боковой силы: А—В, А1—В1, А2—В2 —характерные точки колеса
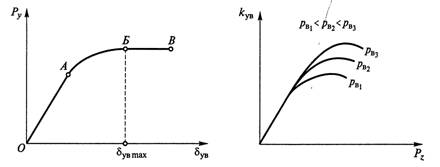
Рисунок 2.9 Зависимость угла увода колеса от поперечной силы: А—В характерные точки кривой
Рисунок 2.10 Зависимости коэффициента сопротивления уводу колеса от вертикальной нагрузки на него и давления воздуха в шине: рв1 – рв3 — значения давления воздуха в шине
Угол увода колеса можно определить по формуле
 (12)
(12)
где kув — коэффициент сопротивления уводу колеса.
Коэффициент сопротивления уводу колеса зависит от размеров и конструкции шины, давления воздуха в ней и вертикальной нагрузки на колесо. Так, при увеличении размеров шины и давления воздуха в ней коэффициент сопротивления уводу возрастает. При увеличении вертикальной нагрузки на колесо он сначала растет, а затем уменьшается (рисунок 2.10). Для шин грузовых автомобилей и автобусов значения этого коэффициента составляют 30...100кН/рад, а для шин легковых автомобилей 15...40кН/рад. От значения коэффициента сопротивления уводу во многом зависит боковое скольжение колеса. Чем меньше этот коэффициент, тем раньше начинается боковое скольжение[1].
Похожие работы

... и др., а также приобретен преподавателями ВУЗов ценный опыт ездовых испытаний автомобилей. 3. Оценка параметров устойчивости и управляемости АТС в стендовых условиях Устойчивость и управляемость АТС в значительной степени определяют активную безопасность автотранспортных средств (АТС) и, следовательно, общий уровень безопасности дорожного движения (БДД). В настоящее время международные и ...
... —к «массе». Качество отработки элементов вождения по трудным грунтам зависит от наличия и состояния цепей противоскольжения, трековых дорожек, матов и средств самовытаскивания 4. РАЗРАБОТКА КОНСТРУКЦИИ ДУБЛИРУЮЩЕГО УСТРОЙСТВА УПРАВЛЕНИЯ 4.1. ОПРЕДЕЛЕНИЕ РАСЧЕТНОЙ НАГРУЗКИ НА ВАЛ, ВОЗВРАТНЫЕ ПРУЖИНЫ И ПЕДАЛИ. Номинальное усилие на дополнительные педали тормоза и сцепления будет находиться в ...
... 33,33 Pк, кН 0,606 0,431 0,460 0,491 0,526 Pв, кН 0,771 0,292 0,369 0,456 0,552 Р, кН 1,377 0,723 0,829 0,947 1,078 2. Расчет параметров торможения транспортного средства Во время движения водитель постоянно изменяет скорость автомобиля в соответствии с изменением дорожной обстановки. Он постоянно должен быть готов в случае необходимости к ...



... некоторые опции сидений изменяют размер и положение подголовника. ТРАВМОБЕЗОПАСНЫЙ РУЛЕВОЙ МЕХАНИЗМ Травмобезопасное рулевое управление является одним из конструктивных мероприятий, обеспечивающих пассивную безопасность автомобиля – свойство уменьшать тяжесть последствий дорожно-транспортных происшествий. Рулевой механизм рулевого управления может нанести серьёзную травму водителю при лобовом ...
0 комментариев