Навигация
Динамический расчет дифференциального привода
23195
знаков
1
таблица
16
изображений
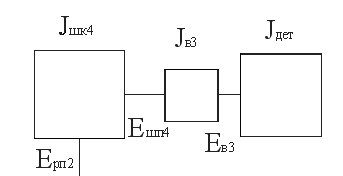
1.4 Динамический расчет дифференциального привода
Уравнение движения поршня дифференциального привода имеет вид:
![]() Р, (1.23)
Р, (1.23)
где ![]() - масса поршня;
- масса поршня;
Р1 – сила вредного сопротивления (трения);
Р2 – сила полезного сопротивления
Р - результирующая всех сил, приложенных к поршню;
![]() ; (1.24)
; (1.24)
![]() ; (1.25)
; (1.25)
![]() ; (1.26)
; (1.26)
![]() . (1.27)
. (1.27)
Рассмотрим обратный ход поршня. Уравнение его движения при обратном ходе, когда поршневая полость 2 соединяется с атмосферой имеет вид:
![]() Р, (1.28)
Р, (1.28)
Р = Р1 + Р2 + Рз + Ра (Р1 - Р2),
2. Разработка математической модели объекта
На основании дифференциальных уравнений, которые описывают поведение пневмоцилиндра в процессе работы, была составлена динамическая модель пневмоцилиндра. Далее выполняем моделирование (исследование) составленной модели. Нагружаем модель единичным ступенчатым воздействием, который воздействует на поршневую полость.
Таблица 1 Обозначения переменных, используемых в дин.модели
| Описание | Обознач. | В схеме | Ед. |
| Давление в поршневой полости пневмоцилиндра | P1 | P1 | Па |
| Давление в поршневой полости пневмоцилиндра | P2 | P2 | Па |
| Начальная координата поршня | Х01 | Х01 | м |
| Начальный объем рабочей полости | V01 | V01 | м3 |
| Площадь поршня | F1 | F1 | м2 |
| Давление в магистрали | PM | Pm | Па |
| Газовая постоянная | R | R | |
| Температура воздуха в магистрали | TM | Tm | К |
| Показатель адиабаты |
|
| |
| Коэффициент расхода |
| My1 | |
| Площадь входного отверстия | f1 | f1 | м2 |
| Функция расхода |
| Fi1 | |
| Коэффициент расхода |
| My2 | |
| Площадь входного отверстия | f2 | f2 | м2 |
| Площадь поршня со стороны штоковой части | F2 | F2 | м2 |
| Рабочий ход | s | s | м |
| Конечная координата поршня | Х02 | Х02 | м |
| Перемещение поршня | Х | Х | м |
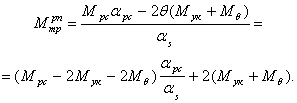
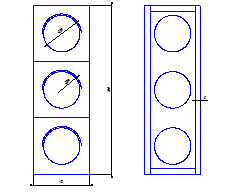
Давление в штоковой полости Р2 находится с помощью давления Р1:
![]()
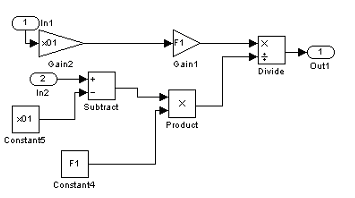
Рисунок 2.1 – Подсистема для уравнения нахождения Р2.
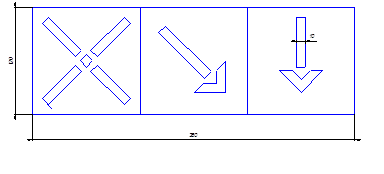
Представим каждое уравнение динамической модели в виде схемы:
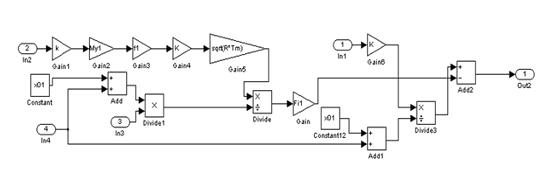
Рисунок 2.2 – Подсистема для уравнения ![]() .
.
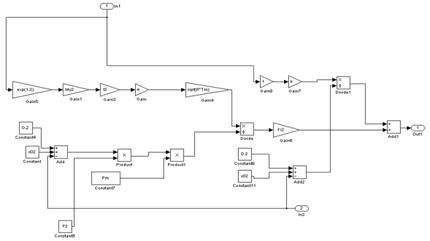
Рисунок 2.3 - Подсистема для уравнения  .
.
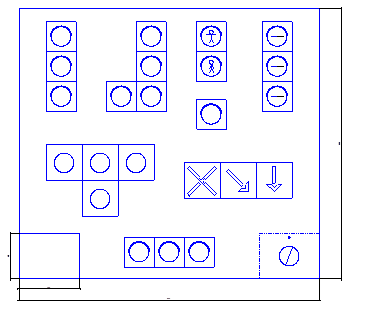
Окончательная схема приведена на рисунке 2.4:
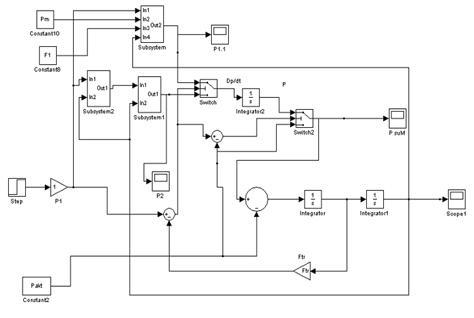
Рисунок 2.4 – Схема, описывающая поведение объекта.
Исходные данные:
P1=0,0010 Pakt=0,003 Ftr=0.15 S=0,2 x01=0,01 k=1,4 My1=0.9
f1=0,5 K=14 R=278 Tm=290 F1=0,6 Pm=3 Fi1=0,5282
x02=0,1 My2=0.9 f2=0,5 F2=0,6 F,2=0.5282
Графики, которые были получены:
Рsum – поведение силы
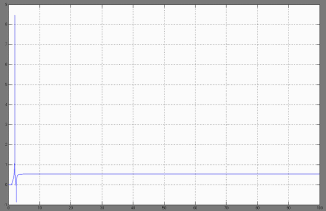
Рисунок 2.5 – График изменения суммарных сил, действующих в поршне, от воздействия силы изменяющейся ступенчато
Перемещение поршня
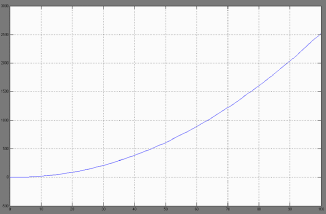
Рисунок 2.6 – График, показывающий перемещение пневмоцилиндра от воздействия всех факторов
Похожие работы
... : . (32) Производную (32) следует рассматривать как частную производную функции ряда переменных , одной из переменных - усилию в рулевом приводе автомобиля: . (33) Усилие в рулевом приводе, являющееся основной характеристикой рабочих процессов, в момент измерения критерия качества РП можно считать единственной переменной величиной, рассматривая остальные факторы постоянными, в ...
... 13.2 Идентификация опасных и вредных производственных факторов Проанализируем все опасные и вредные производственные факторы, которые могут возникнуть при выполнении технологических операций на участке изготовления червяка и внесем их в таблицу 13.2 Таблица 13.2 Опасные и вредные производственные факторы № п/п Наименование опасного и вредного производственного фактора Виды работ, ...
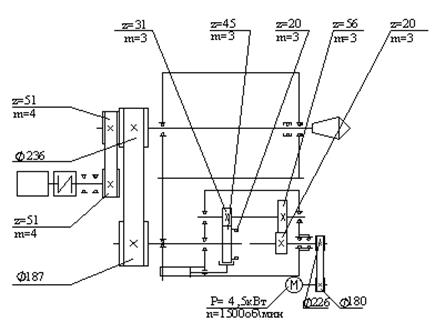
... двигателя и добиваемся его реализации путем изменения числа зубьев в приводе, сохраняя при этом общее число зубьев в сумме. На рисунке 1 приведена принципиальная кинематическая схема привода главного движения станка с учетом индивидуального задания, согласно которому общее передаточное отношение . Рисунок 1 – Кинематическая схема привода 1.1.2 Выбор двигателя Для выбора двигателя ...
... ситуациям. В связи с этим в настоящее время можно выделить две основные проблемы, связанные с совершенствованием автодромной подготовки водителей: - выбор рациональной конфигурации трассы автодрома и её параметров, исходя из конкретных задач обучения; - разработка технического оборудования автодромов, позволяющего моделировать различные дорожно-транспортные ситуации, в том числе и ...
0 комментариев