Побудова планів механізму
Кінетостатичне дослідження шарнірно-важільного механізму
Синтез зубчастої передачі
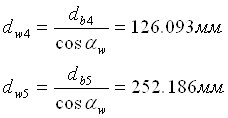
Розрахунок контрольних розмiрiв евольвентного зацеплення
Перевiрка на вiдсутнiсть пiдрiзання
Побудова графіків питомих ковзань
Пiдбiр чисел зубцiв планетарного механiзму
Кiнематичне дослiдження редуктора
Визначення мінімального радіуса центрового профілю кулачка
Навигация
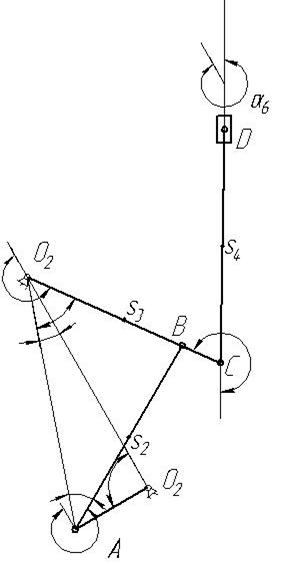
Побудова планів механізму
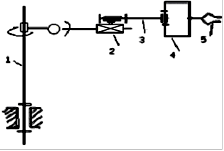
Проектування та дослідження механізму привода конвеєра
29036
знаков
10
таблиц
20
изображений
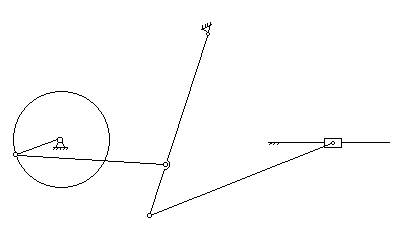
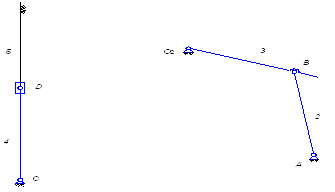
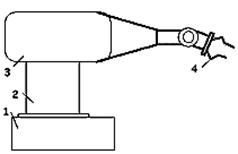
1.2 Побудова планів механізму
Для побудови планів механізму необхідно вибрати масштабний коефіцієнт:
Побудуємо план механізму в нульовому положенні. Знайдемо довжини ланок механiзму, для цього зображуемо механiзм у крайнiх положеннях. Визначимо кут ![]() -кут мiж лiнiями кривошипа в крайнiх положеннях механiзму, який дорiвнюе куту хитання кулiси
-кут мiж лiнiями кривошипа в крайнiх положеннях механiзму, який дорiвнюе куту хитання кулiси ![]() :
:
 ,
,
де ![]() -коефiцiент змiни середньоi швидкостi повзуна 5.
-коефiцiент змiни середньоi швидкостi повзуна 5.
Знаходимо довжину кривошипу:
 .
.
Знаходимо довжину ![]() :
:
 ,
,
де Н-хiд повзуна.
Знаходимо довжину шатуна :
![]() ,
,
де  - вiдношення довжин.
- вiдношення довжин.
Вiдстань вiд осi обертання кулiси дотраекторii руху точки F, дорiвнюе:

Кривошип зображуємо у 3-х положеннях, відкладаючи від нульового положення задане кутом ![]() =900 і від нього відкладаємо положення +30о і -30о, які нумеруємо у напрямку обертання кривошипа. Положення ланок на кожному плані механізму визначаємо методом насічок (штрихом).
=900 і від нього відкладаємо положення +30о і -30о, які нумеруємо у напрямку обертання кривошипа. Положення ланок на кожному плані механізму визначаємо методом насічок (штрихом).
Визначаємо наступнi довжини:
Визначаємо величини ланок на кресленні:
 ;
;
 ;
;
 .
.
1.3 Побудова планів швидкостей та визначення кутових швидкостей ланок механізму
План швидкостей будуємо для всіх трьох положень механізму.
Приймаємо  ;
;
1) Перше положення (![]() =30°):
=30°):
Задача вирішується графічно. Для побудови плану швидкостей розглянемо швидкості крапок А, В, D,E, F.
Крапка Dі А нерухомі, тому лiнiйнi швидкостi ![]() і
і![]() = 0м/с,
= 0м/с,

де ω1 - кутова швидкість ланки 1.
Зобразимо точку В у виглядi трьох точок : точка В1 належить кривошипу 1; точка В1 належить кулiсному каменю 2 ; точка В1 належить кулiсi 3.
![]()
![]() - спрямована перпендикулярно до АВ
- спрямована перпендикулярно до АВ
Щоб зобразити вектор ![]() на кресленні проробимо наступну операцію:
на кресленні проробимо наступну операцію:
 ,
,
де![]() - вектор швидкості крапки B1 на кресленні.
- вектор швидкості крапки B1 на кресленні.
Швидкість точки В1 складається з переносної швидкості, яка дорівнює швидкості точки В3 та відносної швидкості, яка дорівнює швидкості точки В2 відносно точки В3.
Вирішуємо його графічно, тому що на плані зображений вектор ![]() - підсумковий, лінію, перпендикулярну DB, проводимо з його початку – полюсу
- підсумковий, лінію, перпендикулярну DB, проводимо з його початку – полюсу ![]() , а лінію, яка паралельна DB – через точку
, а лінію, яка паралельна DB – через точку ![]() . Їхнє перетинання буде точкою
. Їхнє перетинання буде точкою ![]() . А невідомі модулі векторів визначимо, виміривши відрізки
. А невідомі модулі векторів визначимо, виміривши відрізки ![]() і
і ![]() :
:

![]()
З теореми подоби трикутників знаходимо швидкiсть ![]() точки С :
точки С :
 ,
,
де ![]() ,
, ![]() - вектори швидкості точок B1 та С на кресленні
- вектори швидкості точок B1 та С на кресленні
![]()
![]()
З теореми подоби трикутників знаходимо швидкiсть ![]() точки E :
точки E :

![]()
![]()
Швидкість точки F складається з переносної швидкості, яка дорівнює швидкості точки E та відносної швидкості, яка дорівнює швидкості точки F відносно точки E .
![]()
![]()
![]()
![]()
![]()
З теореми подоби трикутників знаходимо швидкiстi центрiв мас ланок 3 та 4:
 ,
,

![]()
![]()
![]()
![]()
де ![]() ,
, ![]() - вектори швидкостей центрiв мас ланок 3 та 4 на кресленні.
- вектори швидкостей центрiв мас ланок 3 та 4 на кресленні.
 ,
,
де ![]() та
та ![]() - кутових швидкостей ланок 4 та 3 вiдповiдно.
- кутових швидкостей ланок 4 та 3 вiдповiдно.
2) Друге (![]() =0°) та третє (
=0°) та третє (![]() =60°) положення:
=60°) положення:
Всі обчислення аналогічно першому положенню.
Таблиця 1.1 Результати обчислення планів швидкостей та кутових швидкостей
| Параметр | 1 (90°) | 2 (0°) | 3 (60°) |
| VB1,B2 ,м/c | 1,25 | 1,25 | 1,25 |
| VB3 ,м/c | 1,18 | 1,18 | 1,18 |
| VB2-B3 ,м/c | 0,42 | 0 | 0,7 |
| VC, м/c | 1,43 | 1,46 | 1,387 |
| VE ,м/c | 0,82 | 0,83 | 0,79 |
| VF, м/c | 0,8 | 0,83 | 0,4 |
| VF-E, м/c | 0,16 | 0 | 0,4 |
| VS3, м/c | 0,54 | ||
| VS4 ,м/c | 0,8 | ||
|
| 4,15 | 0 | 2,71 |
|
| 0,6 | 0 | 1,5 |
1.4 Побудова планів прискорень, визначення кутових прискорень ланок механізму та визначення за модулем і напрямком лінійних прискорень центрів мас, кутових прискорень ланок
План прискорень будуємо для всіх трьох положень механізму.
- перше положення (![]() ):
):
![]() ;
;
Приймаємо 
![]() ,
,
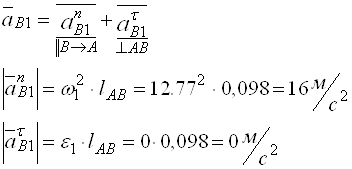
![]() - прискорення крапки В1;
- прискорення крапки В1;
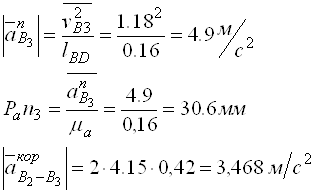
![]() - нормальна складова прискорення крапки В1;
- нормальна складова прискорення крапки В1;
![]() - тангенцiальна складова прискорення крапки В1;
- тангенцiальна складова прискорення крапки В1;
![]() - кутове прискорення кривошипу 1;
- кутове прискорення кривошипу 1;
![]() - вектор прискорення крапки B1 на кресленні;
- вектор прискорення крапки B1 на кресленні;
Знаходимо прискорення крапки В2:
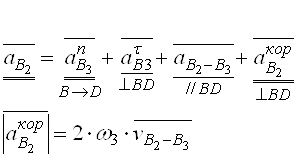
Знаходимо прискорення крапки В:
![]()
 ,
,
де карiолicове прискорення точки B2 вiдносно B3
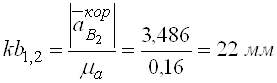
![]() -вектор корiолicова прискорення точки B2 вiдносно B3 на кресленні;
-вектор корiолicова прискорення точки B2 вiдносно B3 на кресленні;
З теореми подоби трикутників визначаємо величину вектору Pae:
Вирішуємо пропорцію і знаходимо рішення:

Знаходимо величину вектору Pae на кресленні:
![]()
Знаходимо прискорення крапки F,яке складається з переносного та відносного рухів точки F:
Знаходимо нормальне прискорення крапки F відносно крапки E:
![]()
Визначаємо величину вектору ![]() на кресленні:
на кресленні:
Знаходимо прискорення крапки F:
![]() ,
,
де ![]() - величина вектору
- величина вектору ![]() на кресленні.
на кресленні.
Знаходимо тангенцiальне прискорення крапки F відносно крапки E:
![]() ,
,
де ![]() - величина вектору
- величина вектору ![]() на кресленні.
на кресленні.
Знаходимо кутові прискорення ланок 3 і 4:
З теореми подоби трикутників визначаємо величину вектору лiнiйного прискорення центру мас Pas3 кулiси 3:
Вирішуємо пропорцію і знаходимо рішення:

Знаходимо величину вектору Pas3 на кресленні:
![]()
З теореми подоби трикутників визначаємо величину вектору лiнiйного прискорення центру мас Pas4 шатуна 4:
Вирішуємо пропорцію і знаходимо рішення:

Знаходимо величину вектору Pas3 на кресленні:
![]()
З теореми подоби трикутників визначаємо величину вектору PaC:
![]()
Вирішуємо пропорцію і знаходимо рішення:

Знаходимо величину вектору Pac на кресленні:
![]()
Друге та третє положення визначаються аналогічно першому.
Таблиця 1.2 Результати обчислень прискорень та кутових прискорень
| Параметр | 1 (30°) | 2 (0°) | 3 (60°) |
|
| 16 | 16 | 16 |
|
| 4,9 | 16 | 2,3 |
|
| 1,6 | 0 | 4 |
|
| 5,12 | 16 | 4,6 |
|
| 9,8 | 21,1 | 6,19 |
|
| 0,096 | 0 | 0,2 |
|
| 3,2 | 0 | 0,7 |
|
| 2,08 | 0 | 3,8 |
|
| 3,53 | 10,8 | 3,5 |
|
| 2,35 | ||
|
| 6,4 | ||
|
| 4 | 0 | 6,5 |
|
| 3,486 | 0 | 4,1 |
|
| 26,47 | 0 | 17,1 |
|
| 12,03 | 0 | 4,3 |
Похожие работы
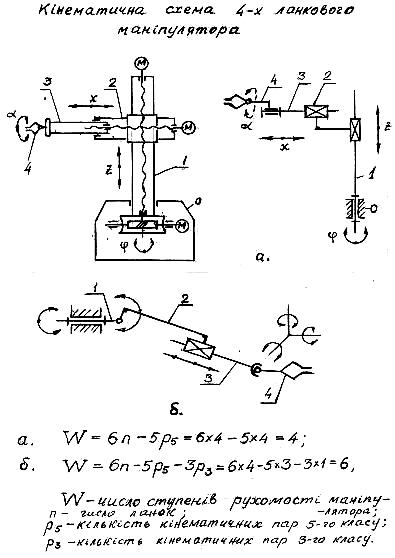
... додатку 1, рисунок 1[14], вариант 5. О2 3 1 О15 А 2 В Д 4 С Рис 1.1.Механізм важіля Механізм важіля складається з п’яти ланок, де ланка ...
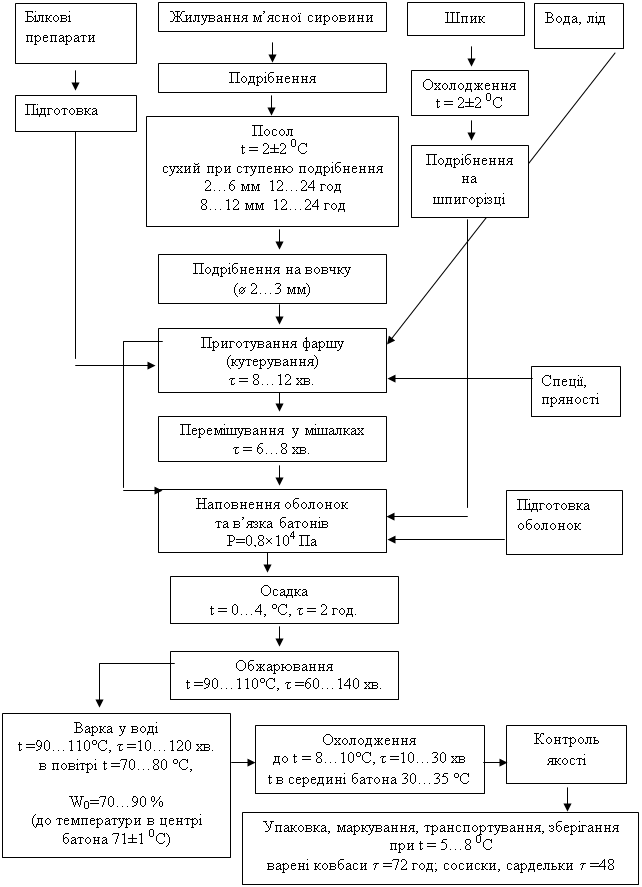
... (ДСТУ, ГОСТам, технологічним інструкціям, тощо). [29] При виборі асортименту врахували місцеві умови і тип підприємства. Співвідношення між окремими видами готової продукції приймаємо згідно Відомчих норм технологічного проектування та з урахуванням того , що варена груп ковбас має найбільший попит у населення.. При виконанні розрахунків ковбасного виробництва обрали груповий асортимент, а потім ...
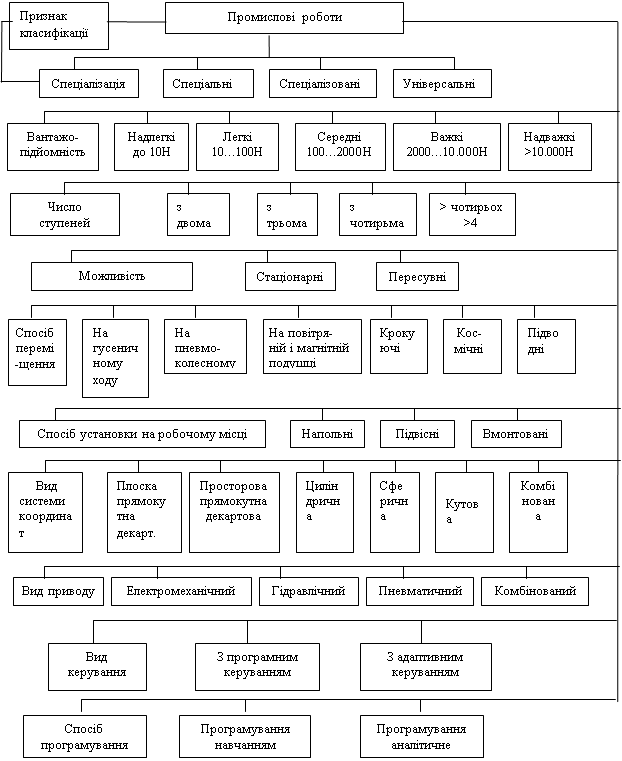
... ,однак для нього характерні суттєві обмеження. Цей метод не потребує застосування універсальних обчислювальних машин, тому він був широко розповсюджений на протязі ряду років, доки введення обчислювальних засобів в промислові роботи настало економічно оправданим. Обмеження цього методу пов’язані з неможливістю використання давачів. Користувач визначає послідовність дій роботів, яка не може мі ...

... розраховується на задану річну продуктивність для кожної стадії. 5.2. Визначення загальних технологічних показників цеху, що проектується: Коефіцієнт використання скломаси (КВС),%; КВС=, (5.1) де А – товарна продукція, т; Е – кількість звареної скломаси, т. КВС=. ...
0 комментариев