Побудова планів механізму
Кінетостатичне дослідження шарнірно-важільного механізму
Синтез зубчастої передачі
Розрахунок контрольних розмiрiв евольвентного зацеплення
Перевiрка на вiдсутнiсть пiдрiзання
Побудова графіків питомих ковзань
Пiдбiр чисел зубцiв планетарного механiзму
Кiнематичне дослiдження редуктора
Визначення мінімального радіуса центрового профілю кулачка
Навигация
Визначення мінімального радіуса центрового профілю кулачка
Проектування та дослідження механізму привода конвеєра
29036
знаков
10
таблиц
20
изображений
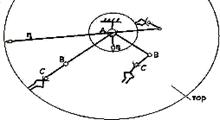
4.2 Визначення мінімального радіуса центрового профілю кулачка
В основу визначення мінімального радіуса центрового профілю можуть бути покладені різні обмеження: мінімальні втрати на тертя, мінімальні контактні напруга і т.д. У нашому випадку мінімальний радіус кулачка вибирають з умови обмеження величини кута передачі руху.
Тому що кулачковий механізм із силовим замиканням, то зворотний рух (повернення) штовхальника відбувається під дією сили пружності пружини, значить відрізки ![]() розраховуються і відкладаються тільки для фази вiддалення.
розраховуються і відкладаються тільки для фази вiддалення.
Для початку визначаємо масштабний коефіцієнт довжини
 .
.
Проводимо дугу окружності радіуса АВ0 і налагоджуємо кут![]() . На дузі намічаємо крапки
. На дузі намічаємо крапки ![]() , таким чином, щоб
, таким чином, щоб ![]() . Для більш точної побудови кути
. Для більш точної побудови кути ![]() будуємо за значеннями тангенсів. Потім від крапки
будуємо за значеннями тангенсів. Потім від крапки ![]() відкладаємо відлічені відрізки
відкладаємо відлічені відрізки ![]() . Крапки
. Крапки ![]() з'єднуємо плавної кривою. Через кожну крапку
з'єднуємо плавної кривою. Через кожну крапку ![]() під кутом
під кутом ![]() до відповідного положенню штовхач проводимо прямі, що разом із променем, проведеним через крапку
до відповідного положенню штовхач проводимо прямі, що разом із променем, проведеним через крапку ![]() під кутом
під кутом ![]() до лінії
до лінії ![]() , виділяємо область можливих розташувань центра обертання кулачка. У цій області вибираємо центр обертання кулачка О, визначивши при цьому мінімальний радіус теоретичного профілю кулачка.
, виділяємо область можливих розташувань центра обертання кулачка. У цій області вибираємо центр обертання кулачка О, визначивши при цьому мінімальний радіус теоретичного профілю кулачка.
4.3 Побудова теоретичного та практичного профілю кулачка
Побудова центрового і дійсного профілів кулачка з обертовим штовхачем виконується в наступній послідовності. Накреслимо лінію штовхача у початковому положенні. Методом насічок, використовуючи розміри ro і ![]() , знаходимо положення центра обертання кулачка О. Відкладаємо кут
, знаходимо положення центра обертання кулачка О. Відкладаємо кут ![]() і будуємо положення штовхача
і будуємо положення штовхача ![]() . У зверненому механізмі (коли кулачок нерухомий) штовхач робить плоский рух, у якому крапка А описує окружність радіуса
. У зверненому механізмі (коли кулачок нерухомий) штовхач робить плоский рух, у якому крапка А описує окружність радіуса ![]() . Провівши цю окружність, від променя
. Провівши цю окружність, від променя ![]() в напрямку, протилежному дійсному обертанню кулачка, відкладаємо послідовно кути
в напрямку, протилежному дійсному обертанню кулачка, відкладаємо послідовно кути ![]() . Дуги, що охоплюють кути
. Дуги, що охоплюють кути ![]() , поділяємо на 10 рівних частин, одержали крапки
, поділяємо на 10 рівних частин, одержали крапки![]() . Проводимо дугу окружності з центром у крапці О і на цій дузі робиться зарубка радіусом
. Проводимо дугу окружності з центром у крапці О і на цій дузі робиться зарубка радіусом ![]() Крапки перетинання
Крапки перетинання ![]() будуть крапками теоретичного (центрового) профілю кулачка. Їх з'єднуємо плавною кривою. Для отримання практичного профілю кулачку проводимо множність окружностей з центрами на кривій теоретичного профілю. Радіус цієї окружності визначаємо за формулою:
будуть крапками теоретичного (центрового) профілю кулачка. Їх з'єднуємо плавною кривою. Для отримання практичного профілю кулачку проводимо множність окружностей з центрами на кривій теоретичного профілю. Радіус цієї окружності визначаємо за формулою:
![]()
де ![]() мінімальний радіус теоретичного профілю кулачка, безлічi окружностей з центрами в крапках центрового профілю.
мінімальний радіус теоретичного профілю кулачка, безлічi окружностей з центрами в крапках центрового профілю.
Внутрішня частина згинаючої кривої цього сімейства окружностей радіуса ролика визначає практичний (дійсний) профіль кулачка.
Висновки
В результаті виконання курсового проекту ми спроектували механізм довбального верстату, параметри якого повністю відповідають вимогам завдання.
Під час роботи використовувалися аналітичні та графічні методи дослідження механізмів. Завдяки цим методам були отримані кількісні та якісні характеристики довбального верстата, які повністю відповідають вимогам його нормальної роботи.
В першій частині ми провели кінематичне дослідження важільного механізму двома методами. Графічний метод – побудова 3 планів механізму, планів швидкостей та прискорень ланок механізму.
В другій частині був здійснений силовий аналіз важільного механізму двома способами: методом академіка М.Г.Бруєвича та методом професора М.Є.Жуковського. Похибка між двома методами складає ![]() %, що не перевищує норму.
%, що не перевищує норму.
В третій частині був зроблено синтез зубчастої передачі: розраховані параметри зубчастого зачеплення, побудована картина зубчастого зачеплення однієї зубчастої передачі, побудован планетарний механізм з розрахунком його лінійних та кутових швидкостей графічним та аналітичним методами з допустимою похибкою не більше 5%.
В четвертій частині був проведена аналіз кулачкового механізму, побудовані графіки прискорень, швидкостей і кута повернення штовхача. Накреслена кінематична схема кулачкового механізму.
Перелік посилань
1. Артоболевський І.І. Теорія механізмів та машин. – М.: Наука, 1988. – 640с.
2. Фролов К.В. Теорія механізмів та машин. – М.: Вища школа, 1987. – 496с.
3. Методичні вказівки по проектуванню та динамічному аналізу механізмів. Донецьк, ДПІ, 1982. – 56с.
4. Методичні вказівки та програми до геометричного та кінематичного розрахунку механізмів на ПМК типу “Електроніка”. – Донецьк, ДПІ, 1991. – 44с.
Похожие работы
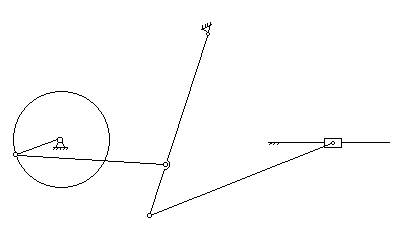
... додатку 1, рисунок 1[14], вариант 5. О2 3 1 О15 А 2 В Д 4 С Рис 1.1.Механізм важіля Механізм важіля складається з п’яти ланок, де ланка ...
... (ДСТУ, ГОСТам, технологічним інструкціям, тощо). [29] При виборі асортименту врахували місцеві умови і тип підприємства. Співвідношення між окремими видами готової продукції приймаємо згідно Відомчих норм технологічного проектування та з урахуванням того , що варена груп ковбас має найбільший попит у населення.. При виконанні розрахунків ковбасного виробництва обрали груповий асортимент, а потім ...
... ,однак для нього характерні суттєві обмеження. Цей метод не потребує застосування універсальних обчислювальних машин, тому він був широко розповсюджений на протязі ряду років, доки введення обчислювальних засобів в промислові роботи настало економічно оправданим. Обмеження цього методу пов’язані з неможливістю використання давачів. Користувач визначає послідовність дій роботів, яка не може мі ...

... розраховується на задану річну продуктивність для кожної стадії. 5.2. Визначення загальних технологічних показників цеху, що проектується: Коефіцієнт використання скломаси (КВС),%; КВС=, (5.1) де А – товарна продукція, т; Е – кількість звареної скломаси, т. КВС=. ...
0 комментариев