Навигация
Описание работы системы управления приводом
27076
знаков
5
таблиц
10
изображений
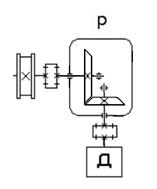
3 Описание работы системы управления приводом
Электропривод тиристорный, — реверсивный, с раздельным управлением, шестиимпульсной силовой схемой. Диапазон мощностей 0,5—18,5 кВт, ток до 200 А и напряжение до 440 В. Преобразователи имеют три типа исполнения: по выходному току 40, 100 и 200 А и два диапазона регулирования 1:1000 и 1:10 000.
Электропривод состоит из регулятора скорости (РС), регулятора тока (РТ), управляемого выпрямителя (УВ), двигателя (Д), тахогенератора (ТГ), датчика тока (ДТ). Регуляторы тока и скорости охвачены цепями коррекции RI, С1 и R2, С2. Между регулятором тока и тиристорным выпрямителем имеется нелинейное звено ИЗ, служащее для обеспечения качества регулирования при переходе из зоны прерывистых в зону непрерывных токов. В схеме отсутствуют уравнительные реакторы, что обусловлено применением раздельного управления группами тиристоров.
Функциональная схема содержит силовую часть, состоящую из трехфазного мостового выпрямителя, подключаемого к сети через согласующий трансформатор Т5 и автоматический выключатель F6. Якорь двигателя М присоединяется к выпрямителям через сглаживающий дроссель L.
Система управления — двухконтурная по принципу подчиненного регулирования, размещена на двух печатных платах Е1 и Е2. На плате Е1 размещены система СИФУ, регуляторы скорости и тока (PC и РТ), функциональный преобразователь ЭДС двигателя (ФПЕ), нелинейное звено (Н3), блок питания (БП), датчик тока (ДТ), узел защиты и сигнализации.
Плата Е2 имеет две модификации — для диапазонов 1:1000 и 1:10000. На плате размещены логическое устройство системы раздельного управления группами тиристоров УЛ с переключателем характеристик ПХ и датчиком проводимости вентилей ДПВ, узел зависимого токоограничения УЗТ.
Пропорционально-интегральные регуляторы скорости и тока выполнены на операционных усилителях А1 и А2. Выходной сигнал регулятора скорости является задающим для внутреннего токового контура. Резистор R17 служит для регулирования степени ограничения максимально возможного тока якоря в переходных режимах и при перегрузках.
Для обеспечения постоянства коэффициента усиления тиристорного выпрямителя в режиме непрерывного и прерывистого токов в канал регулирования введено нелинейное звено (НЗ) с характеристикой, обратной регулировочной характеристике в режиме прерывистого тока. Оно выполнено на операционном усилителе, охваченном нелинейной обратной связью.
Переключатель характеристик ПХ служит для согласования однополярной регулировочной характеристики СИФУ двухполярным сигналом управления Uy. Ограничение углов зажигания тиристоров и установка начального угла зажигания осуществляется усилителем и резистором R41. Максимальный угол (150°) выставляется резистором R49, минимальный (5—10°) — R50.
Зависимое от частоты вращения токоограничение, необходимое при использовании высокомоментных двигателей, осуществляется узлом УЗТ, принцип действия которого основан на ограничении выходного напряжения регулятора скорости в зависимости от напряжения тахогенератора. Максимальное выходное напряжение УЗТ устанавливается резистором R6, минимальное — R5. Резистор R3 определяет крутизну характеристик вход — выход УЗТ.
Сигнал обратной связи по току формируется с помощью датчика тока ДТ, питающегося от трансформаторов тока Т2, Т4. Реверсирование его обеспечивается транзисторными ключами «Вперед» (В) и «Назад» (Н). V16 Подключение выхода СИФУ к необходимому комплекту тиристоров осуществляется логическим устройством УЛ. Оно же управляет ключами «Вперед» и «Назад».
УЛ состоит из нуль-органа (НО), триггера Т1 заданного направления тока, триггера Т2 истинного направления тока, схемы состояний триггеров (СС), элемента отсчета выдержки времени, датчика проводимости вентилей (ДПВ).
Работа УЛ происходит следующим образом: при изменении знака управляющего напряжения изменяется сигнал на выходе нуль-органа. После достижения током в цепи якоря нулевого значения на выходе датчика проводимости вентилей формируется 1 и триггер T1 перебрасывается в новое состояние. Схема совпадения СС фиксирует несоответствие состояния триггеров. Этим обеспечивается блокировка выдачи управляющих импульсов СИФУ, а также запускается элемент отсчета времени. Через 1 мс на его выводе формируется 1 и при отсутствии блокирующего сигнала ДПВ триггер Т2 перебрасывается в новое состояние.
Если во время отсчета выдержки времени на вход НО не поступает команда на включение в первоначальное положение, то триггер Т1 возвращается в исходное положение, соответствующее триггеру Т2. При этом мгновенно разрешается выдача управляющих импульсов на соответствующую группу тиристоров.
Датчик проводимости ДПВ работает по принципу контроля напряжения на тиристорах и состоит из диодных мостов, оптронов, резисторов и нуль-органа на транзисторах. При наличии напряжения на всех тиристорах входы транзисторов шунтируются, в результате чего они запираются и на выходе ДПВ формируется 1.
СИФУ состоит из двух идентичных каналов фазосмещения и управляющего органа (УО). Каждый из каналов выполнен по принципу одноканального управления двумя противофазными вентилями выпрямительного моста. СИФУ включает в себя следующие узлы: источник синхронизирующего напряжения ИСН, три формирователя импульсов ФИ, управляющего органа УО, шести усилителей импульсов УИ, 12 вводных устройств.
ФИ состоит из фильтра (Ф), двух пороговых элементов ПЭ1 ПЭ2, формирователя синхронизирующих импульсов F, генератора пилообразного напряжения Г, нуль-органа НО, триггера Т, формирователя длительности импульсов S.
Работа СИФУ: синхронизирующие напряжения из ИСН сдвигается фильтром Ф на 30°. После ПЭ1, ПЭ2 напряжение имеет форму противофазных прямоугольных импульсов. При сигнале 0 на. выходе формирователя импульсов F формируется синхроимпульс (сигнал 1), которым осуществляется разряд интегрирующей емкости генератора пилообразного напряжения Г до нуля. В момент исчезновения синхроимпульса конденсатор начинает заряжаться и напряжение на выходе Г линейно возрастает от 0 до 10 В. Момент превышения напряжения Г над управляющим напряжением фиксируется нуль-органом НО, который изменяет свое состояние с 1 на 0. При этом триггер Т переключается и на его выходе формируется 0. Это вызывает появление на выходе S управляющего импульса. Импульс приходит на вход одного из усилителей в соответствии с сигналами ПЭ1 и ПЭ2. После УИ усиленный импульс поступает на вводное устройство УВ комплекта тиристоров «Вперед» или «Назад».
Тиристор (Т) после появления 0 на выходе НО сохраняет свое состояние до тех пор, пока из F на другой его вход не поступит синхроимпульс, который подготавливает триггер для выдачи очередного управляющего импульса. Узел защиты обеспечивает максимально – токовую отсечку; защиту от перегрева двигателя при перегрузках; устранение «ползучей» скорости при отключении задатчика частоты вращения; защиту от понижения напряжения питающей сети.
Заключение
В результате выполнения курсовой работы была разработана система управления для тележки мостового крюкового крана с заданными параметрами. Были построены и исследованы энергетические характеристики ряда двигателей постоянного тока, что позволило выбрать приемлемый тип двигателя и проверить его реальные возможности на обеспечение заданных скоростных параметров системы. Произведен расчет основных параметров и осуществлен выбор основных элементов тиристорного преобразователя. ТП рассчитан и спроектирован на основе современных переключающих устройств, обеспечивающих хорошие технические показатели при допустимом тепловом балансе рабочего режима ключевых элементов схемы ТП.
Произведен статический и динамический расчеты системы. Построены статические характеристики ДПТ, логарифмические частотные и фазовые характеристики системы с определением запасов устойчивости по амплитуде и фазе. Для коррекции переходных процессов в системе был применен регулятор, включение которого обеспечило желаемый переходной процесс в замкнутой системе электропривода. Анализ переходного процесса показал, что система отрабатывает управляющее воздействие в заданное пусковое время.
Для управления тиристорным преобразователем и приводом в целом была разработана схема управления с выбором элементов информационного канала: датчиков тока и скорости (тахогенератора), а также определены параметры других необходимых элементов схемы управления.
Список использованных источников
1. Карнаухов Н.Ф. Электромеханические модули мехатронных систем. Основы расчета и проектирования: Учебное пособие. — Ростов н/Д: Издательский центр ДГТУ, 2001.
2. Анурьев В.И. Справочник конструктора машиностроителя. 3 том — 7-е изд., перераб. и доп. М.: Машиностроение, 1992.
3. Справочник по автоматизированному электроприводу /Под ред. Елисеева В.А. и Шинявского А.В. — М.: Энергоатомиздат, 1986.
4. Карнаухов Н.Ф. Электромеханические системы. Основы расчета: Учебное пособие. Ростов н/Д: Издательский центр ДГТУ, 1998.
Похожие работы
... требованиям по перегрузке. 2. Выбор системы управления 2.1 Технико-экономическое обоснование По кривым на рис. 1.3 [2] (с. 12) определяем, что для скорости передвижения тележки V=0.68 м/с и точности остановки v=20 мм требуется обеспечить диапазон регулирования D=1:10. Данному диапазону и установленной мощности электродвигателя удовлетворяют следующие системы управления [2] (табл. ...

... в роторной цепи. Разгон в направлении «Вперед» и «Назад» производится в три ступени с помощью контакторов Кб, К7 и К8 Рисунок 1 - Механические характеристики электропривода механизма передвижения с магнитным контроллером K-63: 1-4 - соответствуют положениям командоконтроллера на подъем; 4а - промежуточная характеристика; На рис. 1 приведены механические характеристики указанной схемы. Для ...
... кран общего назначения грузоподъемностью 16/3,2 т. Поступательно перемещающиеся мостовые краны часто снабжают крюками, скобами либо специальными грузозахватными устройствами (магнитами, грейферами, механическими клещами). Мостовые краны снабжены тележками, предназначенными для подъема и перемещение груза вдоль пролета. Тележки могут перемещаться по рельсам, закрепленные на верхних или нижних ...
... возникают при падениях отдельных грузовых мест (ГМ), соударениях грузов в процессе выполнения ПРР, под воздействием вибраций и колебаний ПС при неустановившихся режимах вождения. Физико-химические свойства характеризуют состояние груза, его способность вступать во взаимодействие с окружающей средой, вредно воздействовать на ПС, складские емкости, ПРМ, другие грузы, а также на здоровье людей. ...
0 комментариев