Навигация
Расчет и построение электромеханических характеристик
27076
знаков
5
таблиц
10
изображений
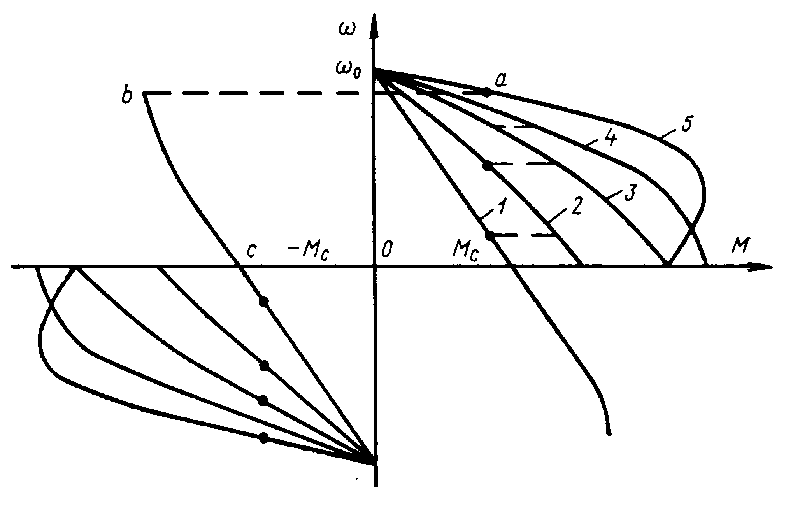
2.8 Расчет и построение электромеханических характеристик
Электромеханическая характеристика двигателя является зависимостью W=f (Iя) при угле регулирования α напряжения тиристорного преобразователя. При изменении  можно получить ряд характеристик ДПТ при питании от ТП.
можно получить ряд характеристик ДПТ при питании от ТП.
Определим значение граничной ЭДС ТП
 (2.39)
(2.39)
где ![]() - параметр нагрузки. (2.40)
- параметр нагрузки. (2.40)

Определим граничное значение скорости
![]() (2.41)
(2.41)

Определим значение граничного тока
![]() (2.42)
(2.42)

Изменяя угол проводимости тиристоров λт в пределах от 0 до 2π/m, рассчитываем электромеханическую характеристику двигателя в зоне прерывистых токов, для углов ![]() и
и ![]() .
.
Строим естественную электромеханическую характеристику электропривода в зоне непрерывных токов для ![]() .
.
![]()
![]()

Рисунок 2.2 - Естественная электромеханическая характеристика при ![]()
∆Ω=95,877-23,515
Строим естественную электромеханическую характеристику
электропривода в зоне непрерывных токов для ![]() .
.
![]()
![]()

Рисунок 2.3 – Электромеханическая характеристика при ![]()
∆Ω=119,857-63,603
2.9 Выбор тахогенератора
Условия, необходимые для выбора тахогенератора:
Ø ![]() , Вт,
, Вт,
![]() Вт;
Вт;
Ø ![]() , рад/с,
, рад/с,
![]() рад/с;
рад/с;
Ø ![]() , кг·м2·10-6,
, кг·м2·10-6,
![]() кг·м2·10-6.
кг·м2·10-6.
Исходя из следующих условий, выбираем тахогенератор типа ДПР-52Н1-01 со следующими параметрами:
© мощность на валу, Рнтг, Вт………………………………………9,4
© скорость вращения, Ωнтг, рад/с………………………………….942
© напряжение питания, Uнтг, В……………………………………27
© ток якоря, Iнтг, А………………………………………………0,53
© сопротивление обмотки якоря, Rнтг, Ом………………………3,6
© момент инерции, Jнтг, кгм2·10-6…………………………………1,7
© масса, mтг, кг…………………………………………………0,26
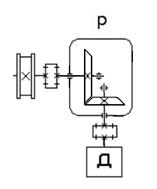
2.10 Определение параметров структурной схемы ДПТ
Номинальные параметры двигателя характеризуются коэффициентами:
 , (2.43)
, (2.43)
 .В·с.
.В·с.
 , (2.44)
, (2.44)
 .
.
Электромагнитная постоянная двигателя определяется, как
 , с. (2.45)
, с. (2.45)
 с.
с.
Определим электромеханическую постоянную времени двигателя
 с. (2.46)
с. (2.46)
![]() , кг·м2,(2.47)
, кг·м2,(2.47)
![]() кг·м2, (2.48)
кг·м2, (2.48)
 кг·м2,(2.49)
кг·м2,(2.49)
 кг·м2.
кг·м2.
![]() кг·м2,
кг·м2,
 с.
с.
Коэффициент усиления двигателя
 , рад/В·с, (2.50)
, рад/В·с, (2.50)
 рад/В·с.
рад/В·с.
Выбор постоянных времени
| Электромеханическая |
|
| Электромагнитная |
|
| Тиристорный преобразователь |
|
| Тахогенератор |
|
| Датчик тока |
|
| Регулятор тока |
|
| Регулятор скорости |
|
Определим коэффициенты усиления системы электропривода
Определим коэффициент усиления разомкнутой системы
 , (2.51)
, (2.51)
где ΔΩ – изменение скорости; D – диапазон регулирования, D = 1000.
 .
.
Определим коэффициент передачи тахогенератора
 , (2.52)
, (2.52)
где Rн – сопротивление входа усилителя, ![]() Ом.
Ом.
 .
.
Определим коэффициент передачи тиристорного преобразователя
 , (2.53)
, (2.53)
![]() .
.
Определим коэффициент усиления усилителя
 , (2.54)
, (2.54)
 .
.
Определим коэффициент усиления регулятора тока и скорости
![]() , (2.55)
, (2.55)
![]() .
.
Похожие работы
... требованиям по перегрузке. 2. Выбор системы управления 2.1 Технико-экономическое обоснование По кривым на рис. 1.3 [2] (с. 12) определяем, что для скорости передвижения тележки V=0.68 м/с и точности остановки v=20 мм требуется обеспечить диапазон регулирования D=1:10. Данному диапазону и установленной мощности электродвигателя удовлетворяют следующие системы управления [2] (табл. ...

... в роторной цепи. Разгон в направлении «Вперед» и «Назад» производится в три ступени с помощью контакторов Кб, К7 и К8 Рисунок 1 - Механические характеристики электропривода механизма передвижения с магнитным контроллером K-63: 1-4 - соответствуют положениям командоконтроллера на подъем; 4а - промежуточная характеристика; На рис. 1 приведены механические характеристики указанной схемы. Для ...
... кран общего назначения грузоподъемностью 16/3,2 т. Поступательно перемещающиеся мостовые краны часто снабжают крюками, скобами либо специальными грузозахватными устройствами (магнитами, грейферами, механическими клещами). Мостовые краны снабжены тележками, предназначенными для подъема и перемещение груза вдоль пролета. Тележки могут перемещаться по рельсам, закрепленные на верхних или нижних ...
... возникают при падениях отдельных грузовых мест (ГМ), соударениях грузов в процессе выполнения ПРР, под воздействием вибраций и колебаний ПС при неустановившихся режимах вождения. Физико-химические свойства характеризуют состояние груза, его способность вступать во взаимодействие с окружающей средой, вредно воздействовать на ПС, складские емкости, ПРМ, другие грузы, а также на здоровье людей. ...
0 комментариев