Навигация
Розрахунок параметрів об'єкта керування для аналізу динамічних властивостей системи
23651
знак
3
таблицы
41
изображение
4. Розрахунок параметрів об'єкта керування для аналізу динамічних властивостей системи
Еквівалентний опір якірного кола двигуна:

Електромагнітна стала часу якірного ланцюга двигуна:
Температурний коефіцієнт:
![]()
Постійна двигуна та номінальна частота обертання:
Електромеханічна стала часу якірного ланцюга двигуна:
Напруга керування на вході ТП, що відповідає максимальній ЕРС на виході Е0n:
![]()
Коефіцієнт передачі тиристорного перетворювача:
Стала часу тиристорного перетворювача:
5. Розрахунок параметрів регулятора і елементів контуру регулювання струму якоря у системі підпорядкованого регулювання
Система підпорядкованого регулювання являє собою багатоконтурну систему з каскадним включенням регуляторів. При цьому число регуляторів і контурів регулювання дорівнює числу регульованих параметрів. У двоконтурній схемі (рис. 2) вихідний сигнал регулятора швидкості, включений у зовнішній контур, є заданим для регулятора струму, включеного у внутрішній контур. Налагодження регуляторів відбувається незалежно і послідовно від внутрішнього контуру до зовнішнього.
Контур струму складається з об'єкта регулювання – ланцюга якоря двигуна, силового перетворювача і регулятора струму. Контур замикається зворотнім зв'язком по величині напруги, що знімається з датчика струму в ланцюзі якоря.
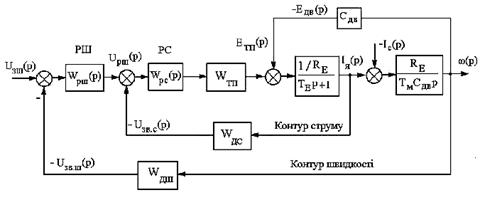
Рис. 2 Двоконтурна система підпорядкованого регулювання
Напруга зворотного зв'язку за струмом:
![]()
Максимально припустимий струм двигуна при перехідних процесах для високомоментного двигуна прийняти:
що відповідає режиму роботи в номінальних обертах. При зменшенні обертів нижче ωн величина Imax буде коректуватися вузлом залежного струмообмеження ВЗСО (у бік збільшення).
Передатний коефіцієнт зворотного зв'язку по струму:
5.1 Налагодження регулятора струму:
Так як об'єкт регулювання в контурі струму поданий аперіодичними ланками, застосовується ПІ-регулятор струму, який настроюється по модульному (технічному) оптимумі. При стандартному налагодженні контуру струму звичайно зневажають внутрішнім зворотним зв'язком по ЕРС, що справедливо, якщо електромагнітна (Те) і електромеханічна (Тм) постійні двигуна значно перевершують постійну часу (Тn), и Тм >> Те. У випадку невиконання умов характер перехідного процесу значно відрізняється від оптимального.
Тобто для відповідності перехідного процесу в контурі регулювання струму перехідному процесу в контурі оптимальній структурі, необхідний ПІ-регулятор струму з коефіцієнтом передачі Крс і постійною часу Трс:
де ![]() с – некомпенсована мала стала часу.
с – некомпенсована мала стала часу.
Настроювання на технічний оптимум характеризуються невеликим перерегулюванням 4,3%. Тривалість перехідного процесу визначається тільки малою некомпенсованою постійною часу і складає 4,7Тμ.
Для одержання перехідного процесу в контурі струму, що відповідає налагодженню на модульний оптимум, визначимо передатну функцію регулятора струму:
5.2 Розрахунок параметрів регулятора струму:
В якості датчика струму використовуємо шунт.
Вибираємо номінальний струм шунта Iш з ряду 10, 20, 40, 100, 200А по номінальному струму привода: Iш ≥ Iп.
Обираємо ![]()
При протіканні через шунт номінального струму шунта Iш с шунта знімається напруга 75 мВ, тому:
- коефіцієнт передачі шунта:
коефіцієнт передачі датчика струму якоря:
![]()
|
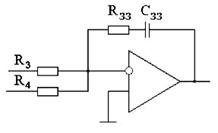
Для розрахунку параметрів регулятора (рис. 3) задаємось величиною ємності Cзз:
![]()
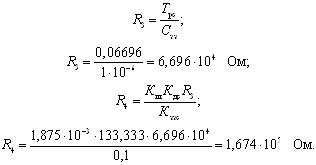
Постійна часу зворотного зв'язку регулятора:
![]()
визначаємо Rзз:
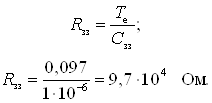
Інші параметри:
Похожие работы

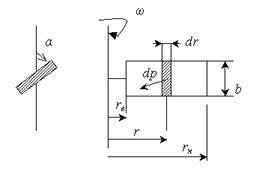
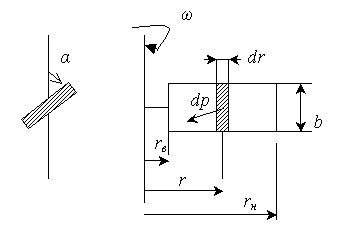
... використовується в подальших розрахунках: де r – відстань до середини лопатки від вісі вала; Z – кількість лопаток які знаходяться одночасно в бетонній суміші. З попередньої формули визначаємо Р: . 2.4 Розрахунок потужності привода машини В загальному випадку момент, необхідний для обертання лопаті: , Н ·м де k – коефіцієнт опору руху лопаті, Н/м2; b – проекція ширини лопаті ...
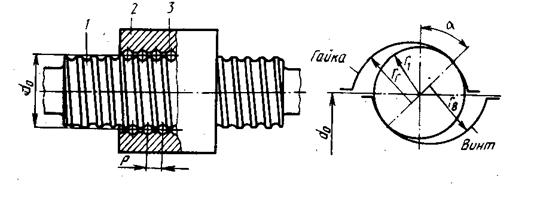
... ; скорость подачи, согласно паспорту станка (табл. 3.1), мм/мин, р=6мм – шаг винта передачи винт-гайка качения, i – передаточное число механизма подачи. Табл.3.1. Механика привода подач станка 6С12Ц Характер подачи Подачи стола, мм/мин Продольная Поперечная Вертикальная Минимальная 20 20 8 Максимальная 1000 1000 400 Ускоренная 2500 2500 1000 Рассчитаем передаточные числа ...
... механизма подачи, которое остается между двигателем и исполнительным механизмом. Принимаем передаточное отношение ременной передачи i=3. Таблица 2 - Механика привода подач станка 16К20 Характер подачи Поперечная подача резцедержателя мм/мин Продольная подача стола, мм/мин Минимальная 0,000662 0,0000619 Максимальная 0,3814 0,253377 Ускоренная 1900 3800 Рассчитаем передаточные ...
... постійного струму з тиристорним управлінням з двома - трьома механічними ступенями, а іноді і без них [2]. В курсовому проекті розробляється електропривод головного руху вертикального сверлійно-фрезерно-розточувального напівавтомата 243ВМФ. Верстат призначений для комплексної обробки заготовок невеликих і середніх розмірів при підході інструменту з одного боку . На верстаті можна проводити ...
0 комментариев