Навигация
Розрахунок параметрів регулятора й елементів контуру регулювання швидкості
23651
знак
3
таблицы
41
изображение
6. Розрахунок параметрів регулятора й елементів контуру регулювання швидкості
6.1 Регулювання зовнішнього контуру швидкості

Об'єктом регулювання зовнішнього контуру швидкості є замкнутий контур струму і ланка, що описує механічний опір двигуна (рис. 4).
Перехідна функція об'єкту регулювання контуру швидкості:

Контур замикається інерційним зворотним зв'язком по швидкості з передатною функцією

Напруга негативного зворотного зв'язку за швидкістю:
![]()
Передавальний коефіцієнт зворотного зв’язку за швидкістю:
Об'єкт регулювання характеризується великою постійної часу Тм, для компенсації якої можна застосувати П – або ПІ-регулятори швидкості. Системи підпорядкованого регулювання з П-регулятором швидкості є інтегрованими однократно. Вони мають достатньо високу швидкодію і мале перерегулювання перехідних процесів, проте мають значний статизм. Такі системи електропривода не спроможні забезпечити великий діапазон регулювання швидкості.
Системи з ПІ-регулятором швидкості називають інтегрованими дворазово. Вони забезпечують широкий діапазон регулювання і практично нульову статичну помилку при збуренні по моменті опору. При налагодженні на симетричний оптимум регулятори характеризуються перерегулюванням 43%. Зменшити перерегулювання можна шляхом включення на вхід СК фільтра (аперіодична ланка).
6.2 Налагодження П-регулятора швидкості
Передатна функція контуру швидкості з П-регулятором:
де  – електромеханічна постійна часу:
– електромеханічна постійна часу:
Еквівалентна постійна часу контуру швидкості:
Корекція контуру здійснюється за рахунок зміни коефіцієнта підсилення регулятора:
Визначення коефіцієнта Крш по формулі характеризує налагодження контуру по модульному (технічному) оптимумі з коефіцієнтом демпфування перехідного процесу ![]() .
.
Перехідна функція оптимізованого контуру швидкості:
Тобто перехідний процес визначає тільки малу постійну часу Тμш.
6.3 Налагодження ПІ-регулятора швидкості:
Передатна функція розімкнутого контуру швидкості з ПІ-регулятором:

При стандартному налагодженні на симетричний оптимум ПІ-регулятора:

Стала часу ПІ-регулятора швидкості:
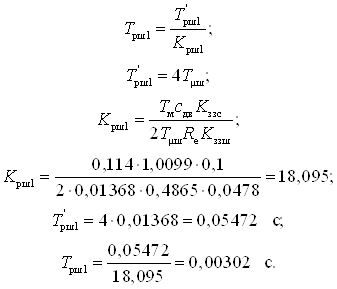
Підставимо значення Крш і Трш1, отримаємо:
тобто регулятор компенсував велику постійну часу – Тм і динамічні властивості контуру визначаються тільки по малій постійній часу Тμш.
Перехідна функція фільтра на вході СК з ПІ-регулятором швидкості:
6.4 Розрахунок параметрів П-регулятора швидкості:
Для визначення параметрів П-регулятора (рис. 5) задамося значенням Rзс:
![]()
Напруга на тахогенераторі:
![]()

|
Коефіцієнт передачі тахогенератора:
Інші параметри:
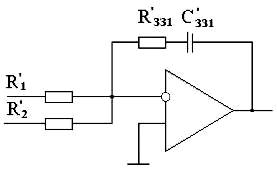
6.5 Розрахунок параметрів ПІ-регулятора швидкості:
Для розрахунку параметрів ПІ-регулятора швидкості (рис. 6), задамось розміром ємності Cзз1:
![]()
|
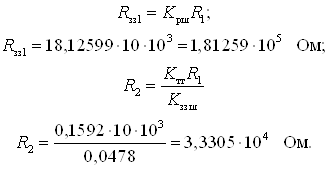
Звідки:
Інші параметри:
7. Статичні характеристики замкненої і розімкненої систем
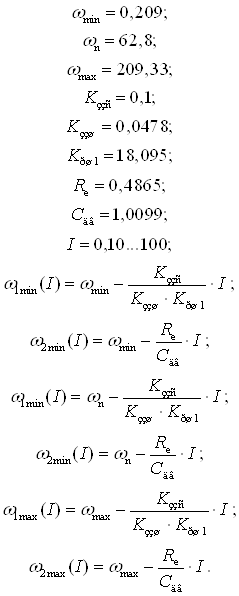
Було проведено статичні характеристики в програмі Mathcad, за допомогою формул:
8. Динамічні характеристики

Рис. 8 Структурна схема замкненої системи з ПІ – регулятором швидкості
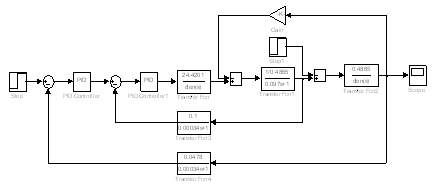
Рис. 9 Структурна схема замкненої системи з П – регулятором швидкості

Рис. 10 Структурна схема замкнутої системи з ПІ – регулятором швидкості і фільтром
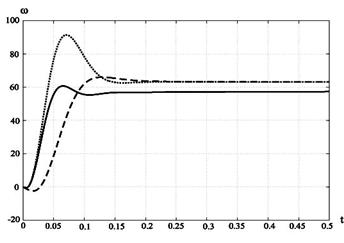
Рис. 11 Перехідні процеси швидкості

Рис. 12 Перехідні процеси струму якоря
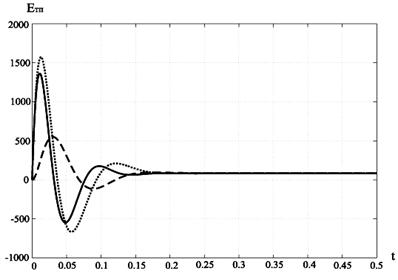
Рис. 13 Перехідні процеси струму якоря
Висновок
При виконанні даної роботи були розраховані параметри системи керування верстатом при заміні його кінематики, що дало змогу відмовитися від редуктора та використання високомоментного двигуна із широким діапазоном регульованих швидкостей.
Дана модернізація не мала негативний вплив на показники якості верстата, що доведено розрахунками статики та динаміки привода. Отримані параметри задовольняють вимогам якості.
Найкращі параметри можливо отримати при використанні ПІ-регулятора. При включенням на його виході фільтра отримаємо найменшу величину пере регулювання.
Список літератури
1. О.Г. Васильєв, А.М. Фоменко, А.С. Віштакалюк. «Методичні вказівки до виконання курсового проекту з курсу «Системи управління електроприводами»»., Миколаїв, 2003.
2. Силовые полупроводниковые приборы. Справочник. Чебовский О.Г. и др. М.: Э. 1975 г., стр. 510.
3. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учебное пособие для вузов. - Л.: Энергоиздат. Ленингр. отд-ние, 1982. – 392 с., ил.
4. Электроприводы постоянного тока с вентильными преобразователями/Е.Н. Зимин, В.Л. Кацевич, С.К. Козырев. - М: Энергоиздат, 1981. – 192 с. ил.
5. Комплектные электроприводы: Справочник/ И.Х. Евзеров, А.С. Горобец, Б.И. Мошкович и др.; Под ред. канд. техн. наук В.М. Перельмутера. - М: Энергоатомиздат, 1988. – 319 с.: ил.
6. Системы автоматического управления электроприводом Анхимюк В.П. Ильин.
7. Примеры расчетов автоматизированного электропривода. Башарин А.В.Л.: Э, 1972 г., стр. 420.
8. Автоматизированный электропривод станков и промышленных роботов. Михайлов О.П.М.: Машиностроение, 1990 г., стр. 302.
Похожие работы

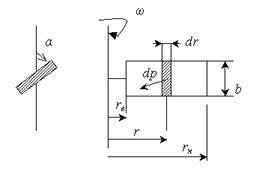
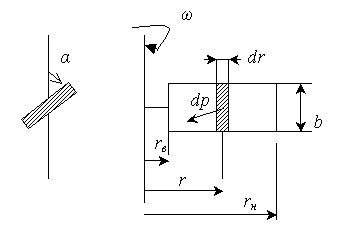
... використовується в подальших розрахунках: де r – відстань до середини лопатки від вісі вала; Z – кількість лопаток які знаходяться одночасно в бетонній суміші. З попередньої формули визначаємо Р: . 2.4 Розрахунок потужності привода машини В загальному випадку момент, необхідний для обертання лопаті: , Н ·м де k – коефіцієнт опору руху лопаті, Н/м2; b – проекція ширини лопаті ...
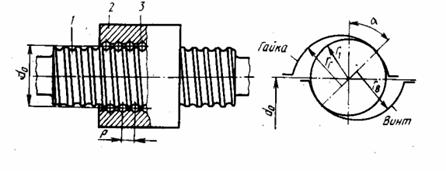
... ; скорость подачи, согласно паспорту станка (табл. 3.1), мм/мин, р=6мм – шаг винта передачи винт-гайка качения, i – передаточное число механизма подачи. Табл.3.1. Механика привода подач станка 6С12Ц Характер подачи Подачи стола, мм/мин Продольная Поперечная Вертикальная Минимальная 20 20 8 Максимальная 1000 1000 400 Ускоренная 2500 2500 1000 Рассчитаем передаточные числа ...
... механизма подачи, которое остается между двигателем и исполнительным механизмом. Принимаем передаточное отношение ременной передачи i=3. Таблица 2 - Механика привода подач станка 16К20 Характер подачи Поперечная подача резцедержателя мм/мин Продольная подача стола, мм/мин Минимальная 0,000662 0,0000619 Максимальная 0,3814 0,253377 Ускоренная 1900 3800 Рассчитаем передаточные ...
... постійного струму з тиристорним управлінням з двома - трьома механічними ступенями, а іноді і без них [2]. В курсовому проекті розробляється електропривод головного руху вертикального сверлійно-фрезерно-розточувального напівавтомата 243ВМФ. Верстат призначений для комплексної обробки заготовок невеликих і середніх розмірів при підході інструменту з одного боку . На верстаті можна проводити ...
0 комментариев