Навигация
Определение реакций в кинематической паре 3-2
10602
знака
4
таблицы
11
изображений
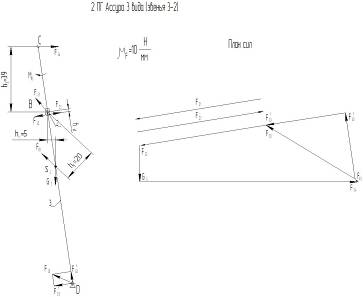
6.3 Определение реакций в кинематической паре 3-2
| № | Что определяется | Каким уравнением | Для какого звена |
| 1. |
|
| 2,3 |
| 2. |
|
| 3 |
| 3. |
|
| 2 |
| 4. |
|
| 2 |
1. ![]() ,
,
![]() =
=
=![]() = 477 Н
= 477 Н
2. ![]()
![]() .
.
F32 = f32 · μF = 75,8 · 10 = 758 H
F23 = -F32; F23 = 758 H
F30n = f30n · μF = 39,8 · 10 = 398 H
F30 = f30 · μF = 61,9 · 10 = 619 H
___ __ __
3. ![]()
F21 = -F23 = 758 H
4. ![]() , откуда
, откуда ![]() =0.
=0.
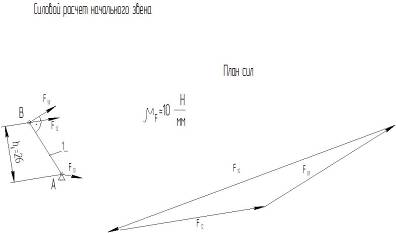
6.4 Определение уравновешивающей силы на кривошипе 1
| № | Что определяется | Каким уравнением | Для какого звена |
| 1. | Fур |
| 1 |
| 2. |
|
| 1 |
1. ![]() ,
,
![]() =
= ![]() = 703,9 Н
= 703,9 Н
2. ![]()
F10 = f10 · μF = 140,4 · 10 = 1404 H
7. Определение уравновешивающей силы с помощью рычага Жуковского
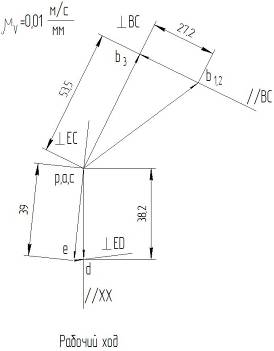
План скоростей для рассматриваемого рабочего положения механизма поворачиваем на 90° в сторону, противоположную вращению кривошипа.
Находим на плане скоростей точку s3, одноимённую точке S3 на механизме.
![]() ; (рs3) =
; (рs3) = ![]() =
= ![]() = 55,8 мм
= 55,8 мм
Все силы, действующие на звенья механизма, включая силы инерции и искомую уравновешивающую силу, переносим параллельно самим себе в одноимённые точки повёрнутого плана. Если на звено действует момент сил, то этот момент следует предварительно представить на звене механизма как пару сил, вычислив их величины:
FM3 = ![]() =
= ![]() = 1,63 H
= 1,63 H
Составим уравнение моментов всех сил относительно полюса повёрнутого плана скоростей:
![]()
![]() =
=
=![]() = 698,5 Н
= 698,5 Н
Полученную с помощью рычага Жуковского уравновешивающую силу сравниваем с силой, полученной в результате кинетостатического расчёта:
![]() ·100% = 0,7% < 5%
·100% = 0,7% < 5%
Список использованной литературы
1. Артоболевский И.И. Теория механизмов и машин. М., 1975г.
2. Петрова Т.М., Дмитриева Л.Н. Методические указания по теории механизмов и машин «Кинематический и силовой расчет механизма», М., МАМИ, 1990г.
Похожие работы
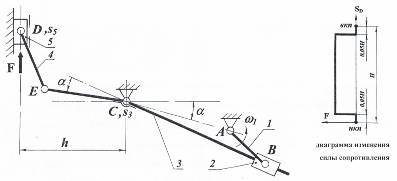
... Звенья 4 и 5 образуют двухповодковую группу Ассура 2 вида (ВВП). В ней внешние кинематические пары: вращательная (3 – 4) и поступательная (5 – 0), внутренняя кинематическая пара – вращательная (4–5). Таким образом, механизм долбежного станка образован последовательным присоединением к начальному звену 1 и стойке 0 двух двухповодковых групп Ассура - сначала 2ПГ 3 вида, а затем 2ПГ 2 вида. 3. ...
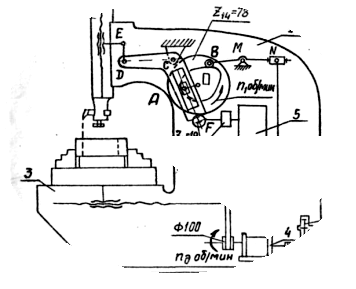
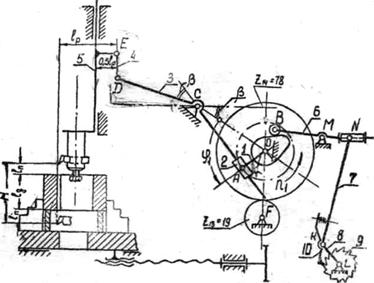
... . Для движения резца используется шестизвенный кривошипно-кулисный механизм с качающейся кулисой, состоящий из кривошипа 1, камня 2, кулисы 3, поводка 4 и ползуна 5 (рис.1-2). Рис. 2. Схема кривошипно-кулисного механизма движения резца и кулачкового механизма подачи стола долбежного станка. Ход ползуна Н выбирается в зависимости от длины lд обрабатываемой поверхности с учетом перебегов lп в ...
0 комментариев