Навигация
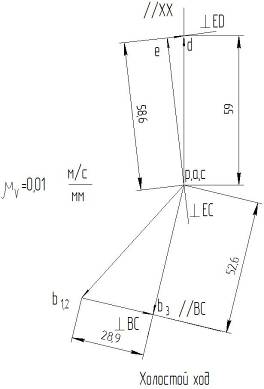
План ускорений для холостого хода
10602
знака
4
таблицы
11
изображений
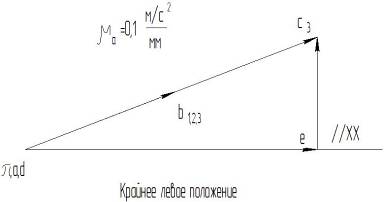
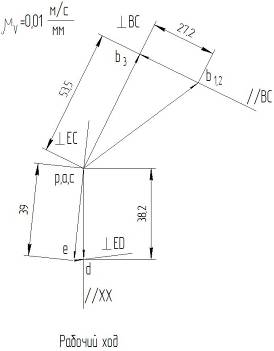
5.2 План ускорений для холостого хода
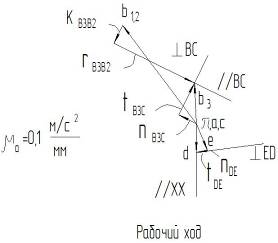
аВ3В2к = 2 · ω3 · VB3B2 = 2 · 3,15 · 0,36 = 2,27 м/с2
КВ3В2 = ![]() =
= ![]() · 0,2 = 22,9 мм
· 0,2 = 22,9 мм
nB3D = ![]() =
= ![]() · 0,2 = 26,3 мм
· 0,2 = 26,3 мм
аВ3 = (πb3) · μа = 52,2 · 0,1 = 5,22 м/с2
аВ3Dt = tB3D · μа = 45,1 · 0,1 = 4,51 м/с2
аВ3В2r = rB3B2 · μа = 76,8 · 0,1 = 7,68 м/с2
![]() ; (πс3) =
; (πс3) = ![]() =
= ![]() = 143,8 мм
= 143,8 мм
аС3 = (πс3) · μа = 143,8 · 0,1 = 14,38 м/с2
__ __ ___
аЕ = аС3 + аС3E
аС3E = с3е · μа = 53,7 · 0,1 = 5,37 м/с2
аЕ = (πе) · μа = 133,4 · 0,1 = 13,34 м/с2
ε1 = 0
ε2 = ε3 = ![]() =
= ![]() = 17,3 c-2
= 17,3 c-2
ε4 = 0
ε5 = 0

5.3. План ускорений для левого крайнего положения.
__ ____ ___
аВ3 = аВ3Dt = аВАn
аВ3 = 5,52 м/с2
![]() ; (πс3) =
; (πс3) = ![]() =
= ![]() = 107,6 мм
= 107,6 мм
аС3 = (πс3) · μа = 107,6 · 0,1 = 10,76 м/с2
аС3E = с3е · μа = 38,6 · 0,1 = 3,86 м/с2
аЕ = (πе) · μа = 100,4 · 0,1 = 10,04 м/с2
ε2 = ε3 = ![]() =
= ![]() = 15,3 c-2
= 15,3 c-2
5.4 План ускорений для правого крайнего положения
аВ3 = аВ3Dt = аВАn
аВ3 = 5,52 м/с2
![]() ; (πс3) =
; (πс3) = ![]() =
= ![]() = 107,6 мм
= 107,6 мм
аС3 = (πс3) · μа = 107,6 · 0,1 = 10,76 м/с2
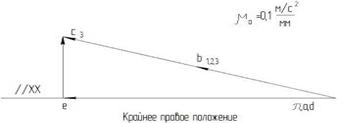
аС3E = с3е · μа = 38,6 · 0,1 = 3,86 м/с2
аЕ = (πе) · μа = 100,4 · 0,1 = 10,04 м/с2
ε2 = ε3 = ![]() =
= ![]() = 15,3 c-2
= 15,3 c-2
6. Кинетостатический расчет механизма
6.1 Определение сил инерции и сил тяжести звеньев
Силы тяжести ![]() ,
, ![]() приложены в центрах масс S3, S5 звеньев и направлены вертикально вниз. Рассчитаем модули этих сил:
приложены в центрах масс S3, S5 звеньев и направлены вертикально вниз. Рассчитаем модули этих сил:
G3 = m3 · g = 22 · 9,8 = 216 H
G5 = m5 · g = 26 · 9,8 = 255 H
При определении сил инерции и моментов сил инерции воспользуемся построенным планом ускорений для нахождения ускорений центров масс звеньев.
![]() ; (πs3) =
; (πs3) = ![]() =
= ![]() = 11,5 мм
= 11,5 мм
аS3 = (πs3) · μа = 11,5 · 0,1 = 1,15 м/с2
aS5 = aЕ = 1,72 м/с2
Теперь рассчитаем модули сил инерции.
Звено 3 совершает вращательное движение.
FИ3 = m3 · aS3 = 22 · 1,15 = 25,3 H
MИ3 = JS3 · ε3 = 0,4 · 2,1 = 0,84 H · м
Звено 5 совершает поступательное движение.
FИ5 = m5 · aS5 = 26 · 1,72 = 44,72 Н
Сила инерции FИ3 приложена в центре масс S3 звена 3 и направлена противоположно ускорению аS3. Сила инерции FИ5 приложена в центре масс S5 звена 5 и направлена противоположно ускорению аS5. Момент сил инерции MИ3 по направлению противоположен угловому ускорению ε3.
Похожие работы
... Звенья 4 и 5 образуют двухповодковую группу Ассура 2 вида (ВВП). В ней внешние кинематические пары: вращательная (3 – 4) и поступательная (5 – 0), внутренняя кинематическая пара – вращательная (4–5). Таким образом, механизм долбежного станка образован последовательным присоединением к начальному звену 1 и стойке 0 двух двухповодковых групп Ассура - сначала 2ПГ 3 вида, а затем 2ПГ 2 вида. 3. ...
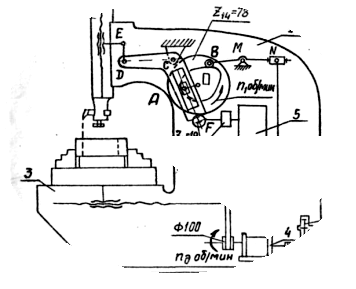
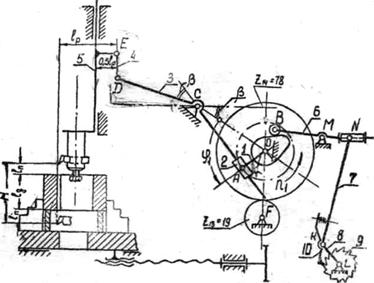
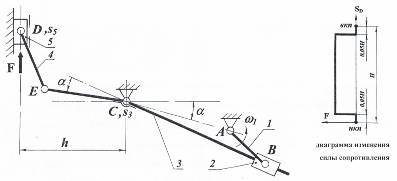
... . Для движения резца используется шестизвенный кривошипно-кулисный механизм с качающейся кулисой, состоящий из кривошипа 1, камня 2, кулисы 3, поводка 4 и ползуна 5 (рис.1-2). Рис. 2. Схема кривошипно-кулисного механизма движения резца и кулачкового механизма подачи стола долбежного станка. Ход ползуна Н выбирается в зависимости от длины lд обрабатываемой поверхности с учетом перебегов lп в ...
0 комментариев