Навигация
Построение положений механизма
10602
знака
4
таблицы
11
изображений
3. Построение положений механизма
Для построения кинематической схемы исследуемого механизма в различных положениях выбираем масштабный коэффициент длины ![]() , который определяется как:
, который определяется как:
μl = l1 / AB = 0,14 / 28 = 0,005 м/мм
Каждое положение механизма обозначено соответствующим индексом:
I – соответствует левому крайнему положению ползуна 5,
II – соответствует правому крайнему положению ползуна 5,
III – соответствует рабочему ходу ползуна 5,
IV – соответствует холостому ходу ползуна 5.
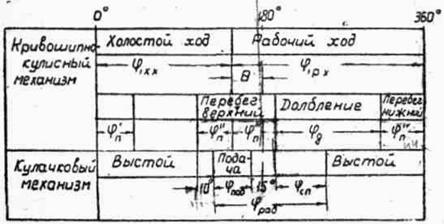
Рабочему ходу ползуна соответствует угол поворота кривошипа φр.х. Холостому ходу – φх.х.
При выборе расчётного рабочего положения используем диаграмму сил F=F(SЕ), построенную на ходе ползуна 5. В металлорежущих станках процесс резания происходит только на части рабочего хода, соответствующей длине обрабатываемой детали lЕ. Поэтому выбираем положение кривошипа на угле поворота φр.х, соответствующем рабочему ходу, когда ползун 5 (точка Е) находится внутри отрезка lЕ.
При выборе положения механизма, соответствующего холостому ходу ползуна, берём любое положение кривошипа на угле его поворота φх.х.
4. Построение планов скоростей
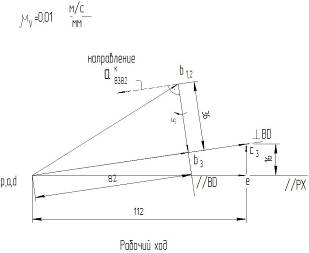
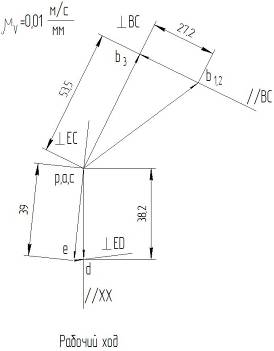
4.1 План скоростей для рабочего хода
VB1 = VB2 = ω1 · l1 = ![]() · l1 =
· l1 = ![]() = 0,9 м/с
= 0,9 м/с
μv = VB1 / (pb1) = 0,9 / 90 = 0,01 ![]()
___ ___ ____
VB3 = VB2 + VB3B2
___ ___ ____
VB3 = VD + VB3D
VB3 = (pb3) · μv = 82 · 0,01 = 0,82 м/с
VB3B2 = (b2b3) · μv = 36 · 0,01 = 0,36 м/с
(c3d) = (b3d) · ![]() = 82 ·
= 82 · ![]() = 113 мм
= 113 мм
VC3 = (c3d) · μv = 113 · 0,01 = 1,13 м/с
__ __ ___
VС3 = VE + VС3E
VЕ = (pе) · μv = 112 · 0,01 = 1,12 м/с
VС3E = (с3е) · μv = 16 · 0,01 = 0,16 м/с
ω2 = ω3 = VB3 / lBD = 0,82 / 0,51 = 1,6 c-1
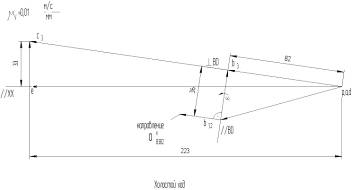
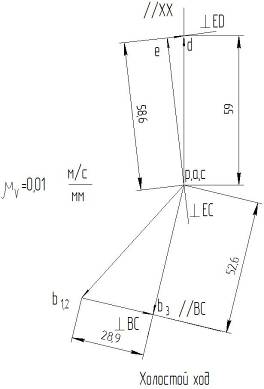
4.2 План скоростей для холостого хода
___ ___ ____
VB3 = VB2 + VB3B2
___ ___ ____
VB3 = VD + VB3D
VB3 = (pb3) · μv = 82 · 0,01 = 0,82 м/с
VB3B2 = (b2b3) · μv = 36 · 0,01 = 0,36 м/с
(c3d) = (b3d) · ![]() = 82 ·
= 82 · ![]() = 225,8 мм
= 225,8 мм
VC3 = (c3d) · μv = 225,8 · 0,01 = 2,26 м/с
__ __ ___
VС3 = VE + VС3E
VЕ = (pе) · μv = 223 · 0,01 = 2,23 м/с
VС3E = (с3е) · μv = 33 · 0,01 = 0,33 м/с
ω2 = ω3 = VB3 / lBD = 0,82 / 0,26 = 3,15 c-1
4.3 План скоростей для левого крайнего положения
VB3 = (pb3) · μv = 0 · 0,01 = 0 м/с
VB3B2 = VB1 = 0,9 м/с
VC3 = 0; VE = 0
ω2 = ω3 = 0; ω4 = 0
4.4 План скоростей для правого крайнего положения
VB3 = (pb3) · μv = 0 · 0,01 = 0 м/с
VB3B2 = VB1 = 0,9 м/с
VC3 = 0; VE = 0
ω2 = ω3 = 0; ω4 = 0
5. Построение планов ускорений
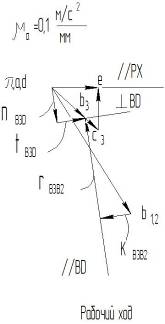
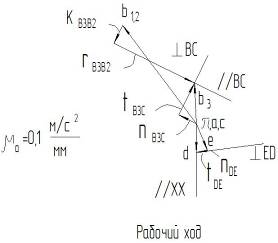
5.1 План ускорений для рабочего хода
аВАτ = 0, т.к. ω1 = const.
аВ1 = аВ2 = аВАn = ![]() = ω12 · lBA =
= ω12 · lBA = ![]() · lBA =
· lBA = ![]() · 0,14 = 5,52 м/с2
· 0,14 = 5,52 м/с2
μа = ![]() =
= ![]() = 0,1
= 0,1 ![]()
__ __ ____ ____
аВ3 = аВ2 + аВ3В2к + аВ3В2r
__ __ ____ ____
аВ3 = аD + аВ3Dn + аВ3Dt
![]() =
= ![]() = 0,2
= 0,2
аВ3В2к = 2 · ω3 · VB3B2 = 2 · 1,6 · 0,36 = 1,16 м/с2
КВ3В2 = ![]() =
= ![]() · 0,2 = 11,5 мм
· 0,2 = 11,5 мм
nB3D = ![]() =
= ![]() · 0,2 = 13,1 мм
· 0,2 = 13,1 мм
аВ3 = (πb3) · μа = 16,9 · 0,1 = 1,69 м/с2
аВ3Dt = tB3D · μа = 10,7 · 0,1 = 1,07 м/с2
аВ3В2r = rB3B2 · μа = 37,5 · 0,1 = 3,75 м/с2
![]() ; (πс3) =
; (πс3) = ![]() =
= ![]() = 23,3 мм
= 23,3 мм
аС3 = (πс3) · μа = 23,3 · 0,1 = 2,33 м/с2
__ __ ___
аЕ = аС3 + аС3E
аС3E = с3е · μа = 15,7 · 0,1 = 1,57 м/с2
аЕ = (πе) · μа = 17,2 · 0,1 = 1,72 м/с2
ε1 = 0
ε2 = ε3 = ![]() =
= ![]() = 2,1 c-2
= 2,1 c-2
ε4 = 0
ε5 = 0
Похожие работы
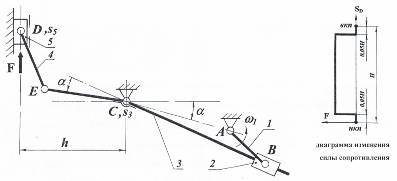
... Звенья 4 и 5 образуют двухповодковую группу Ассура 2 вида (ВВП). В ней внешние кинематические пары: вращательная (3 – 4) и поступательная (5 – 0), внутренняя кинематическая пара – вращательная (4–5). Таким образом, механизм долбежного станка образован последовательным присоединением к начальному звену 1 и стойке 0 двух двухповодковых групп Ассура - сначала 2ПГ 3 вида, а затем 2ПГ 2 вида. 3. ...
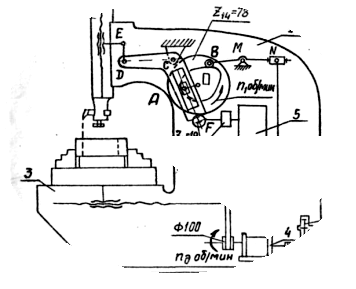
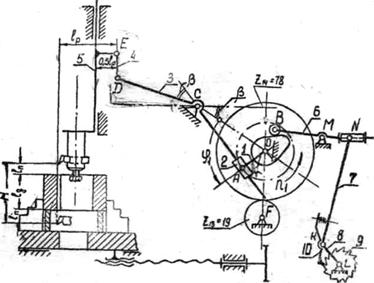
... . Для движения резца используется шестизвенный кривошипно-кулисный механизм с качающейся кулисой, состоящий из кривошипа 1, камня 2, кулисы 3, поводка 4 и ползуна 5 (рис.1-2). Рис. 2. Схема кривошипно-кулисного механизма движения резца и кулачкового механизма подачи стола долбежного станка. Ход ползуна Н выбирается в зависимости от длины lд обрабатываемой поверхности с учетом перебегов lп в ...
0 комментариев